The goal of this project was to develop a method for measuring both indoor and outdoor temperatures. Instead of only checking what the forecast for the outside temperature was, we wanted a way to measure the actual temperatures both inside and out. This is useful for a variety of things.
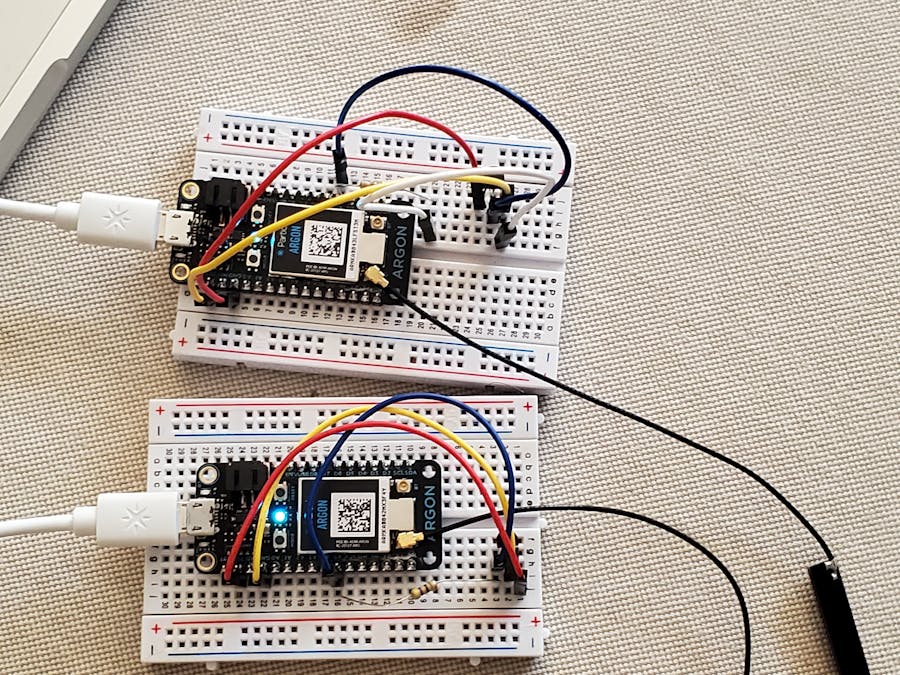
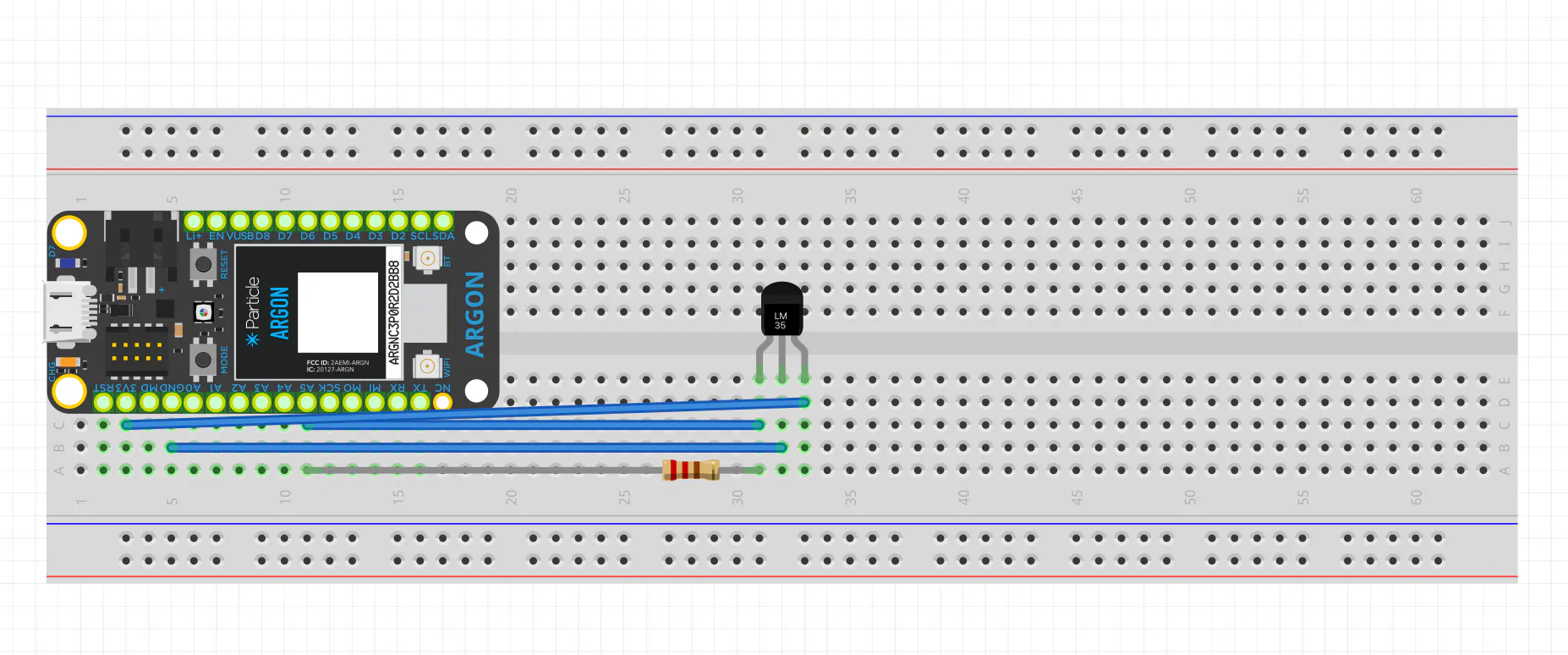
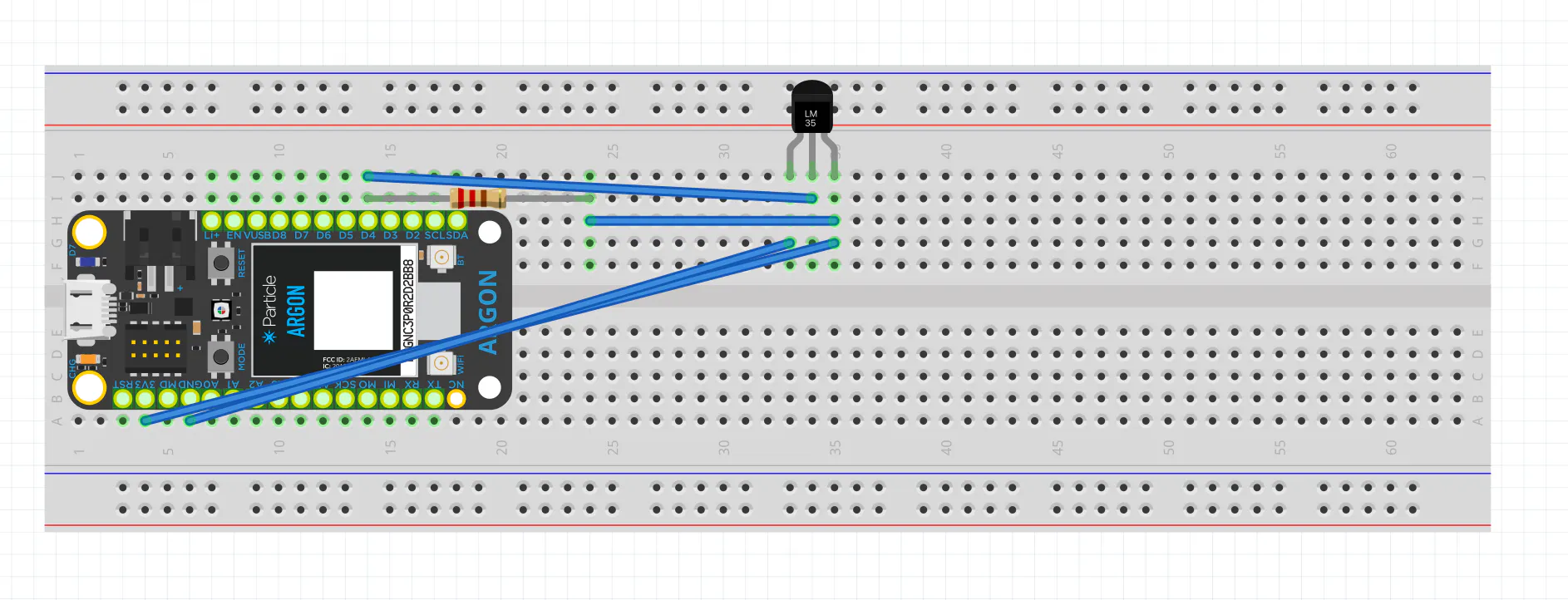
An interior and an outside temperature sensor were first made. In order to make it simpler to distinguish between the two when writing, and coding. we chose somewhat different setups for each temperature sensor. You may see each of the schematics below. The sensors were constructed and then individually coded. Each code enabled the conversion of the voltage collected from the temperature sensor into a real temperature reading.
For the Outside temperature, it seems for unknown reason it dose not work, regardless that the coding is working correctly, but the inside temperature is working and nothing wrong with that for both sensors LM35 and TMP36.



_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.