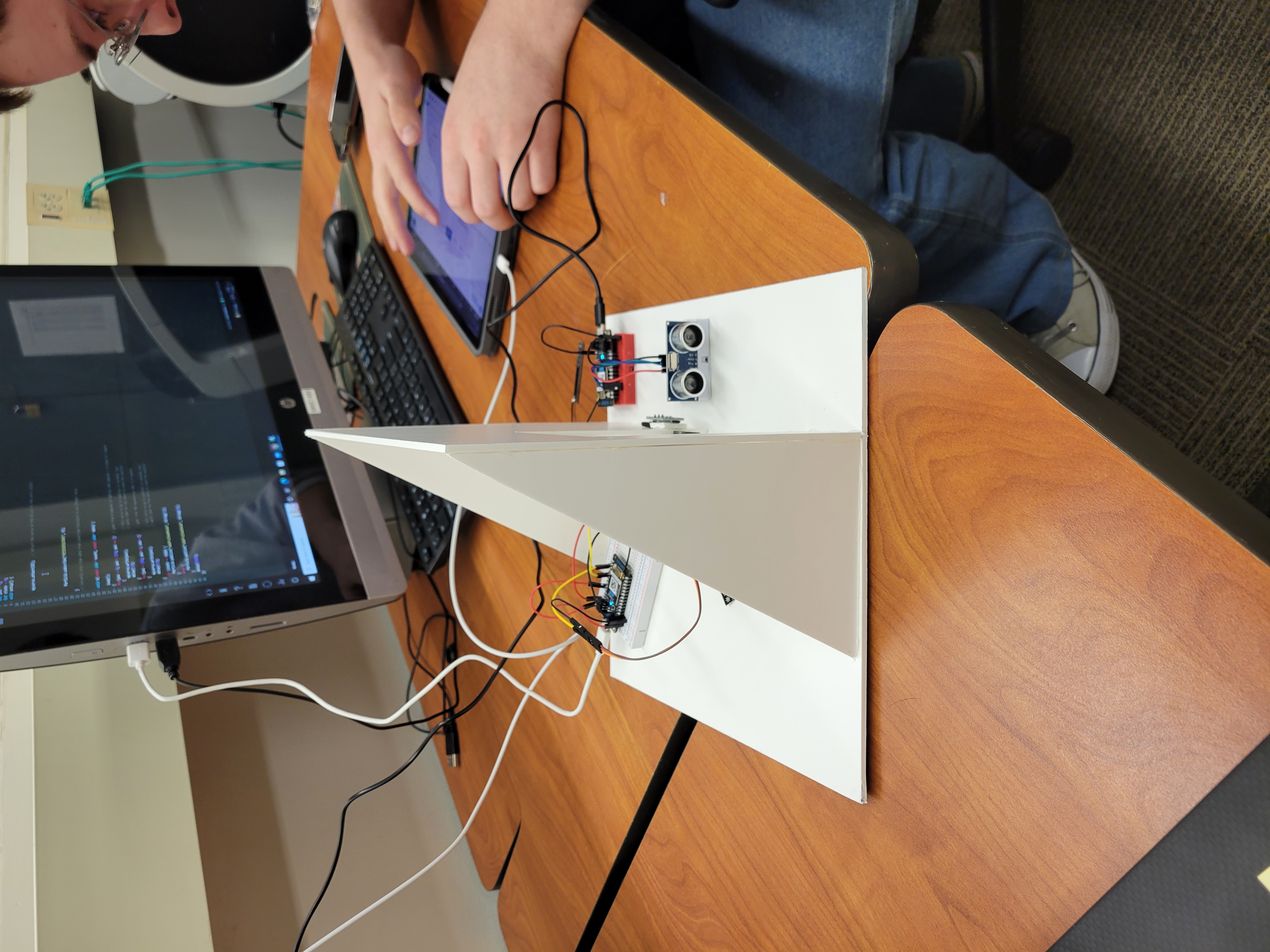
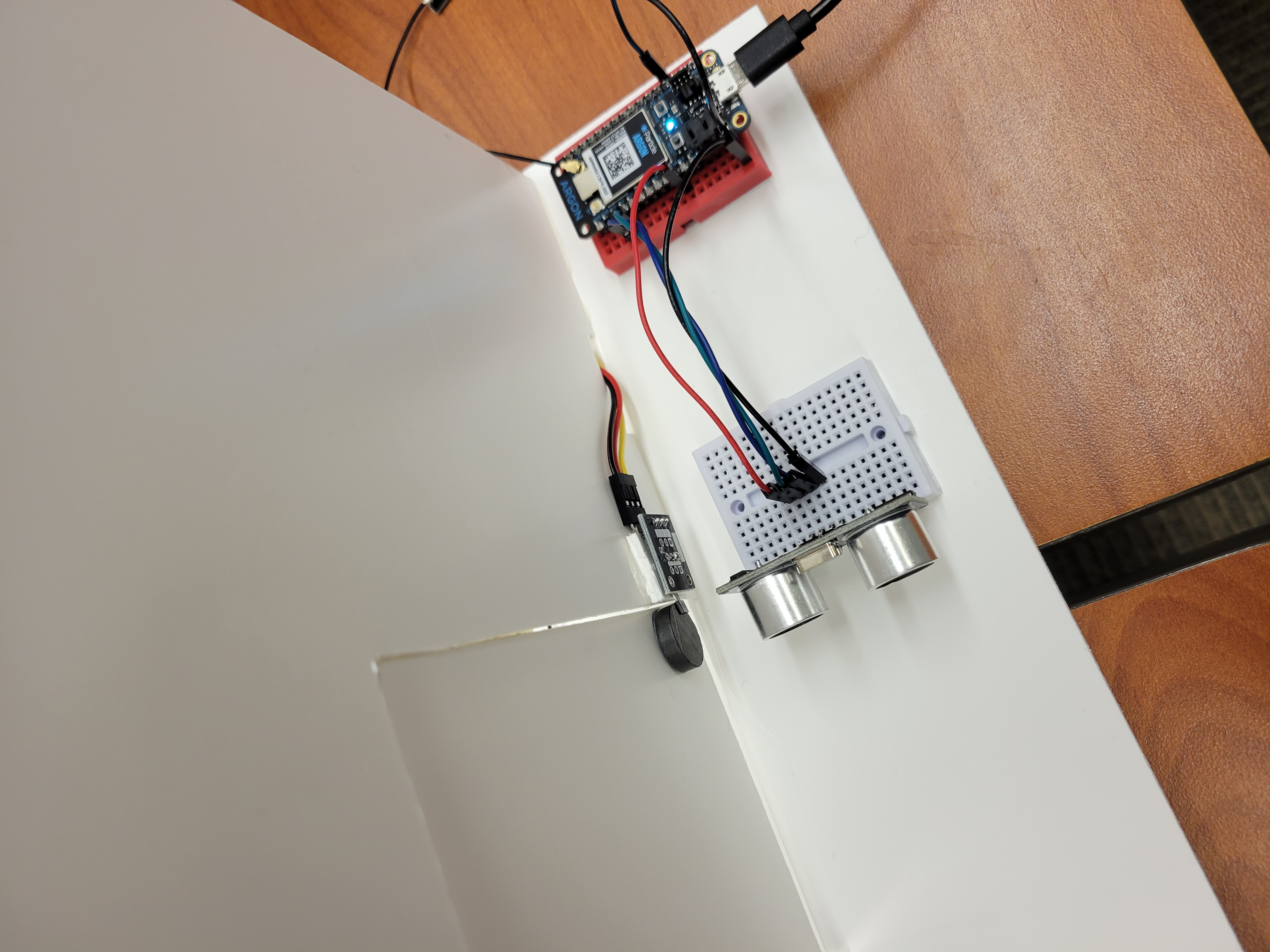
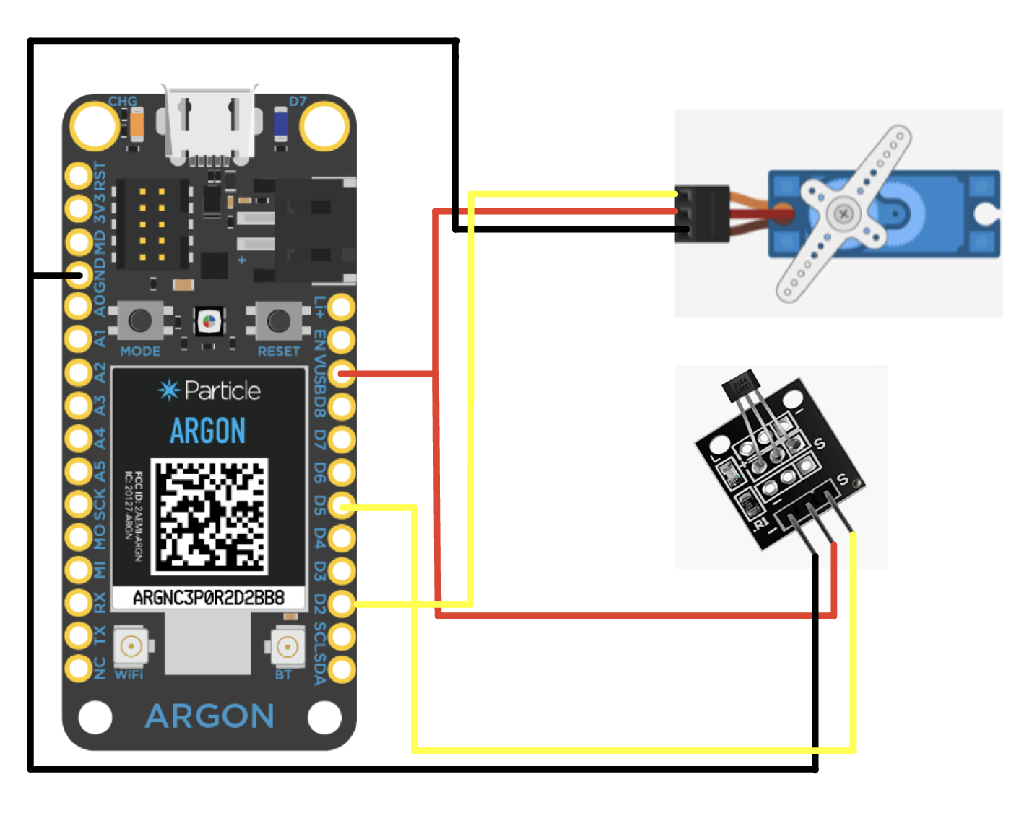
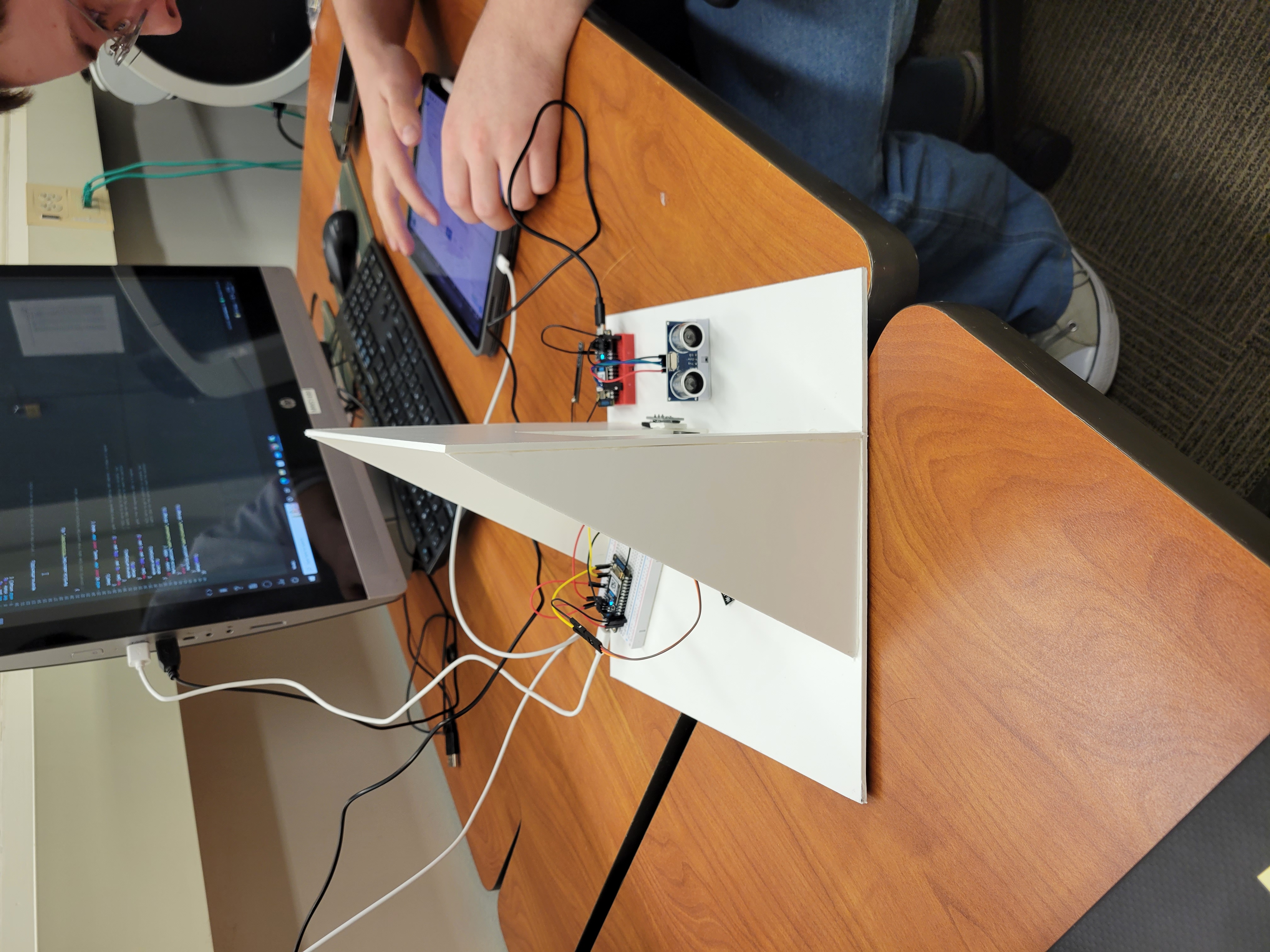
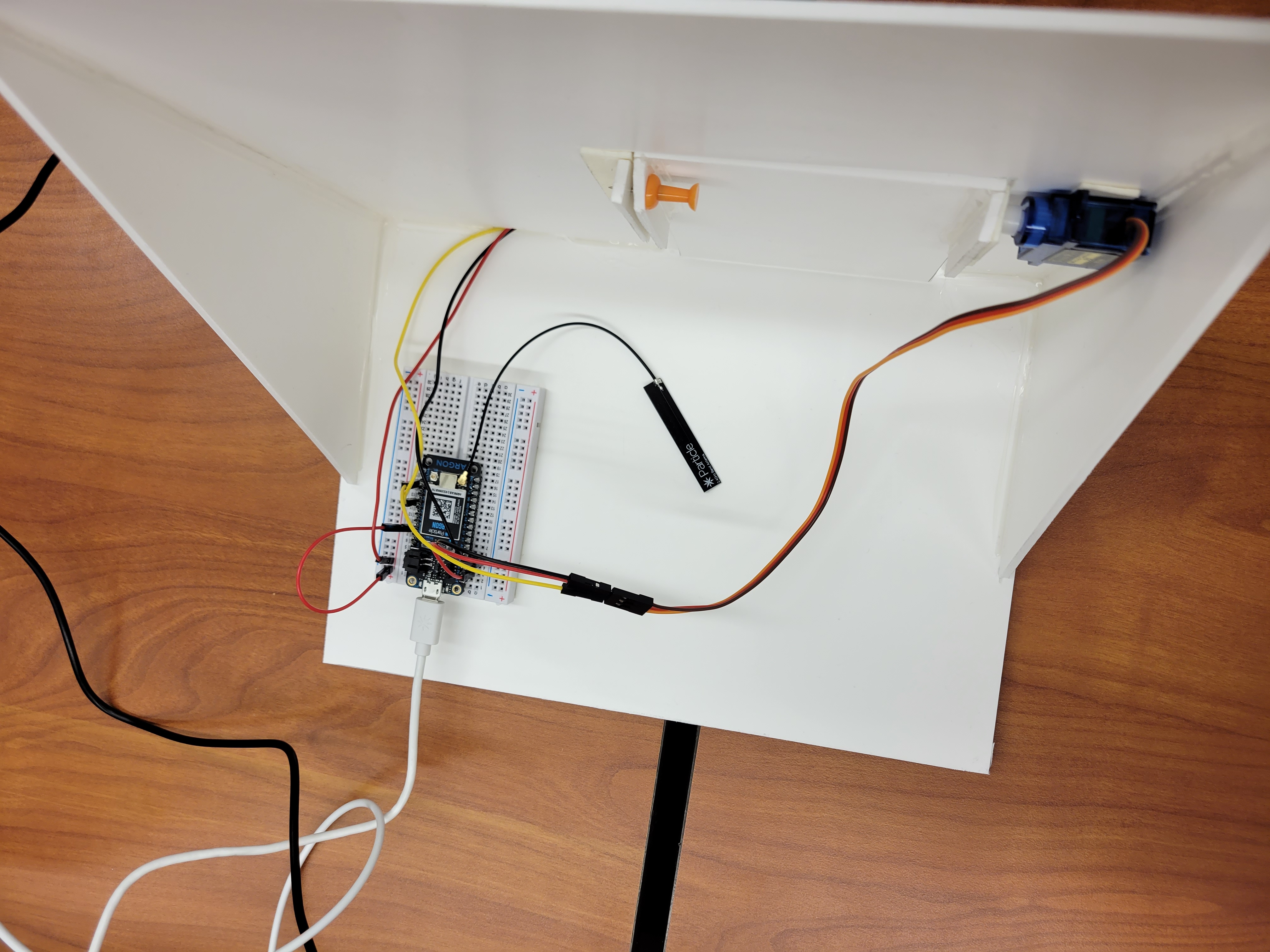
Our project uses particle argons to operate a pet door. The door operates using a servo motor, ultrasonic sensor, and a hall effect sensor.
The idea came to us after we thought that it would be cool to have a pet door that works similarly to a ring doorbell. With this in mind we decided to cut out the camera and stick to just a couple of sensors to operate.
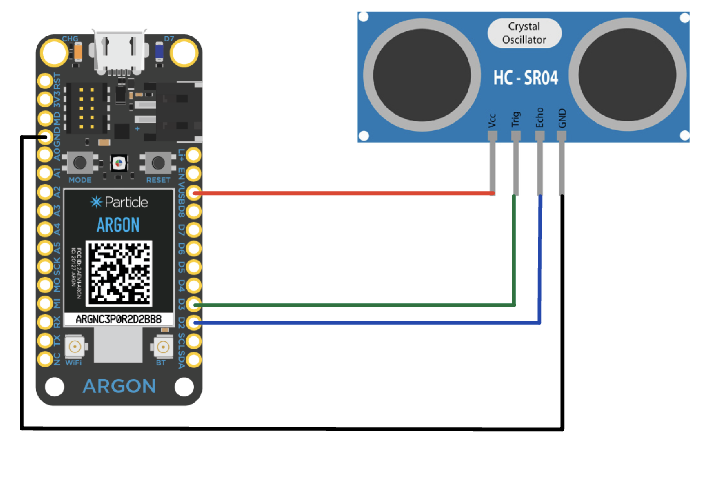
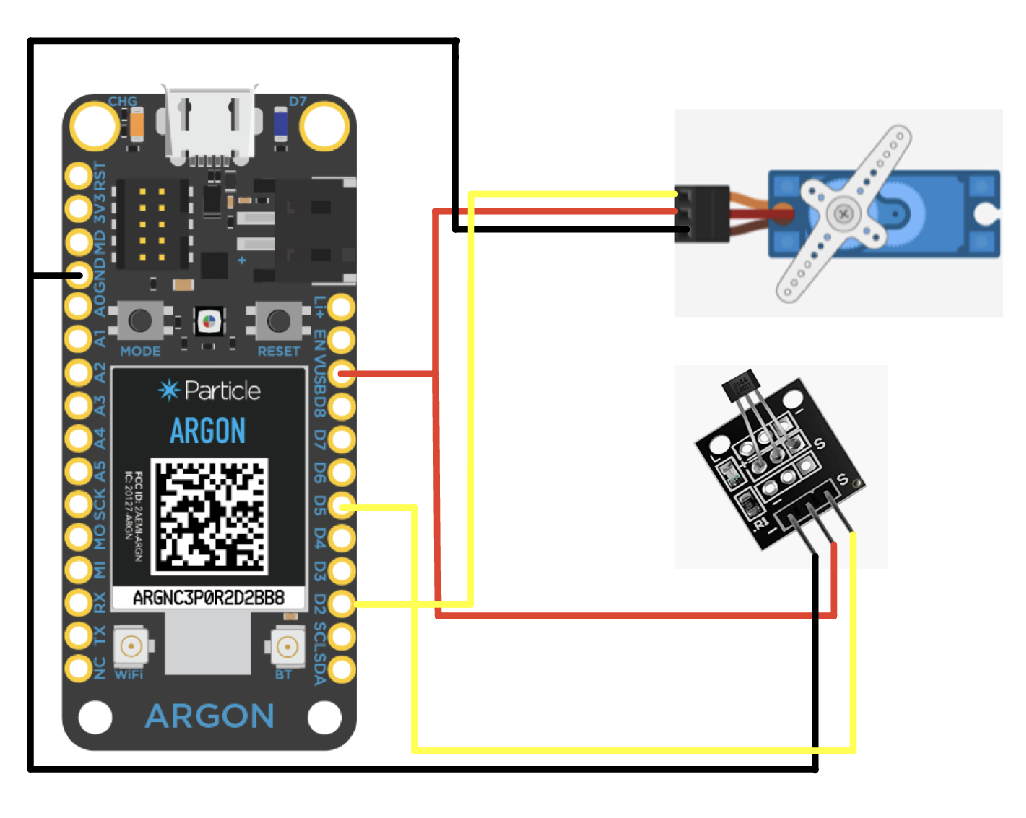
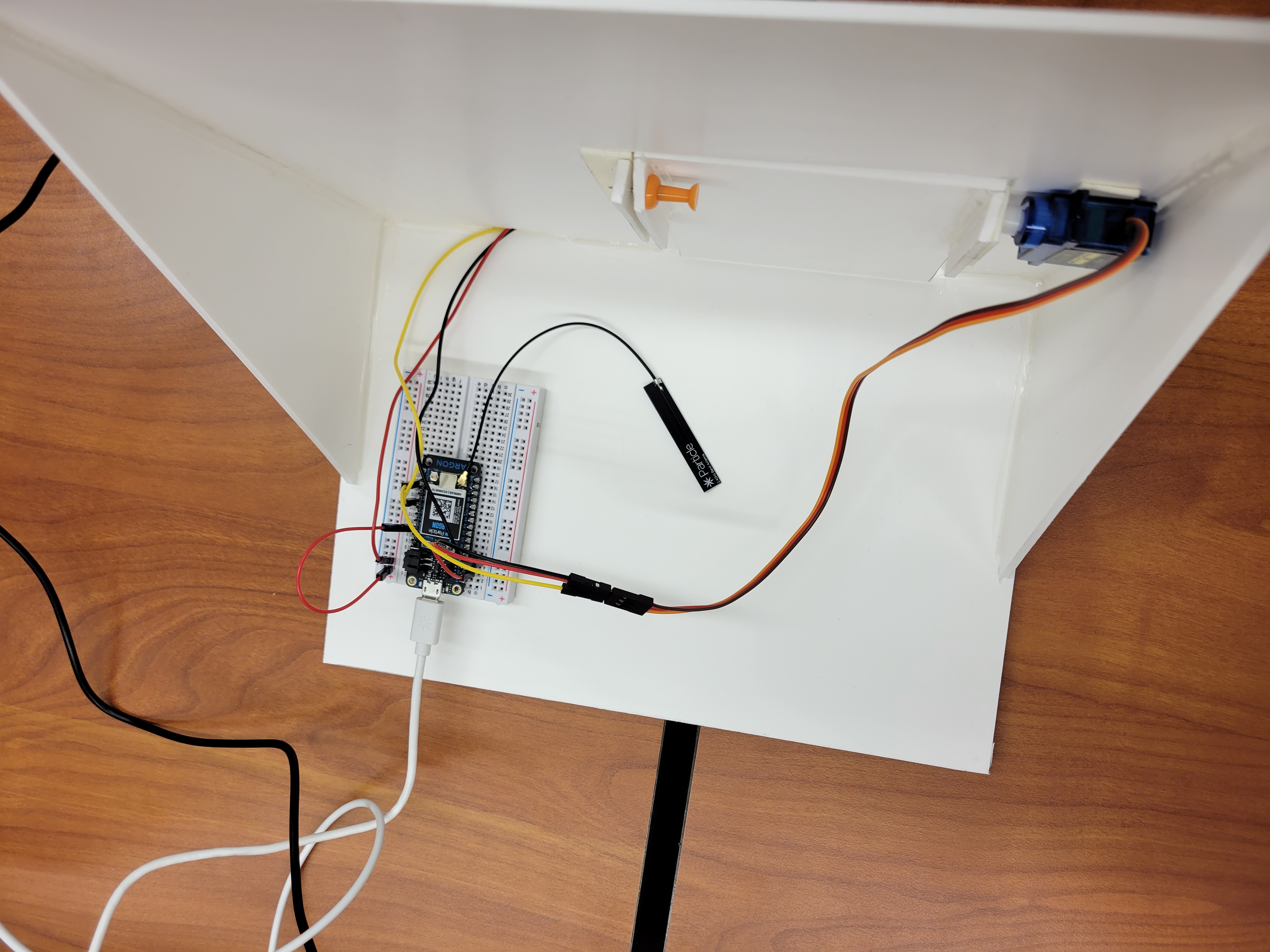
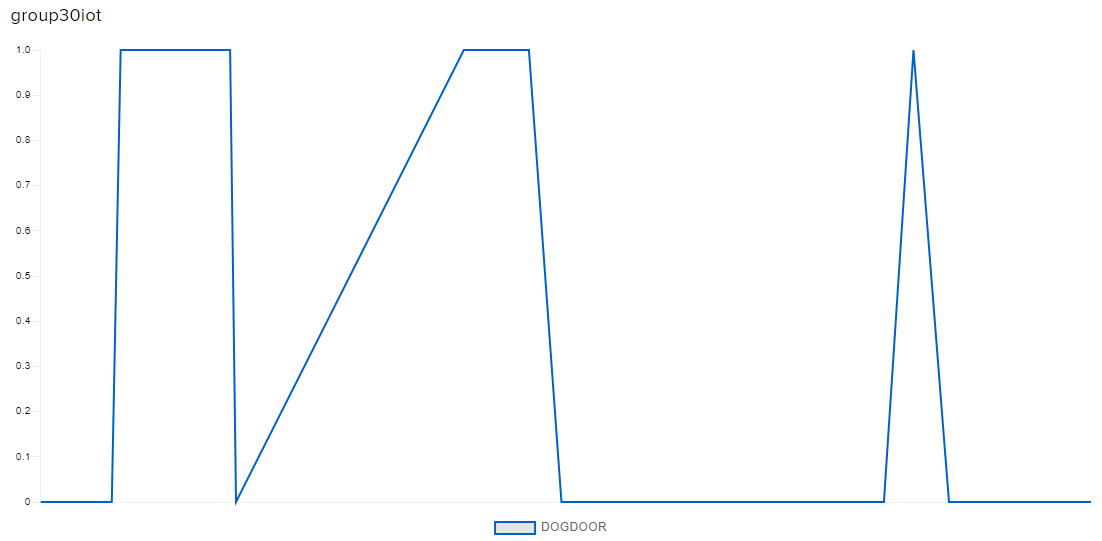
How the door actually works is when the ultrasonic sensor detects motion at the door, it signals to its argon to publish an event to the particle cloud that the second argon is subscribed to. Once the second argon notices that the event from the first argon has been published, it will then operate the servo so that the door opens for the pet to walk through. Once the door has been open for a specified time, the servo will automatically close after a delay specified in the servo code. Additionally, the door has a magnet attached to it that triggers the hall effect sensor once it has been opened or closed. The hall effect sensor then graphs the open and close patterns of the door and those patterns are time stamped for the owner to analyze the pets day-to-day patterns. This is done through the use of webhooks.
Our Adafruit graph is linked Here.
Our explanatory video is linked Here and is also embedded below.





_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.