


This is a proof of concept. The general idea is build a project that can be replicated with cheap materials, to take multiple pictures a compile them in a panoramic final photo.
The Python program run on docker container to avoid the complexity of install the right version of Python, OpenCV and other dependent libraries.
Use ESP32-CAM to control the stepper motor and take the photos, everything is controlled by a Python program, which joins all the photos into a final photo.
DetailsThe 3D part you can download from Thingiverse. There are no screw holes, which allow you to switch to another stepper motor.
All the parts was provide by digitspace.
PanoramicCam
Blog hardware
Build instructionsStep 1
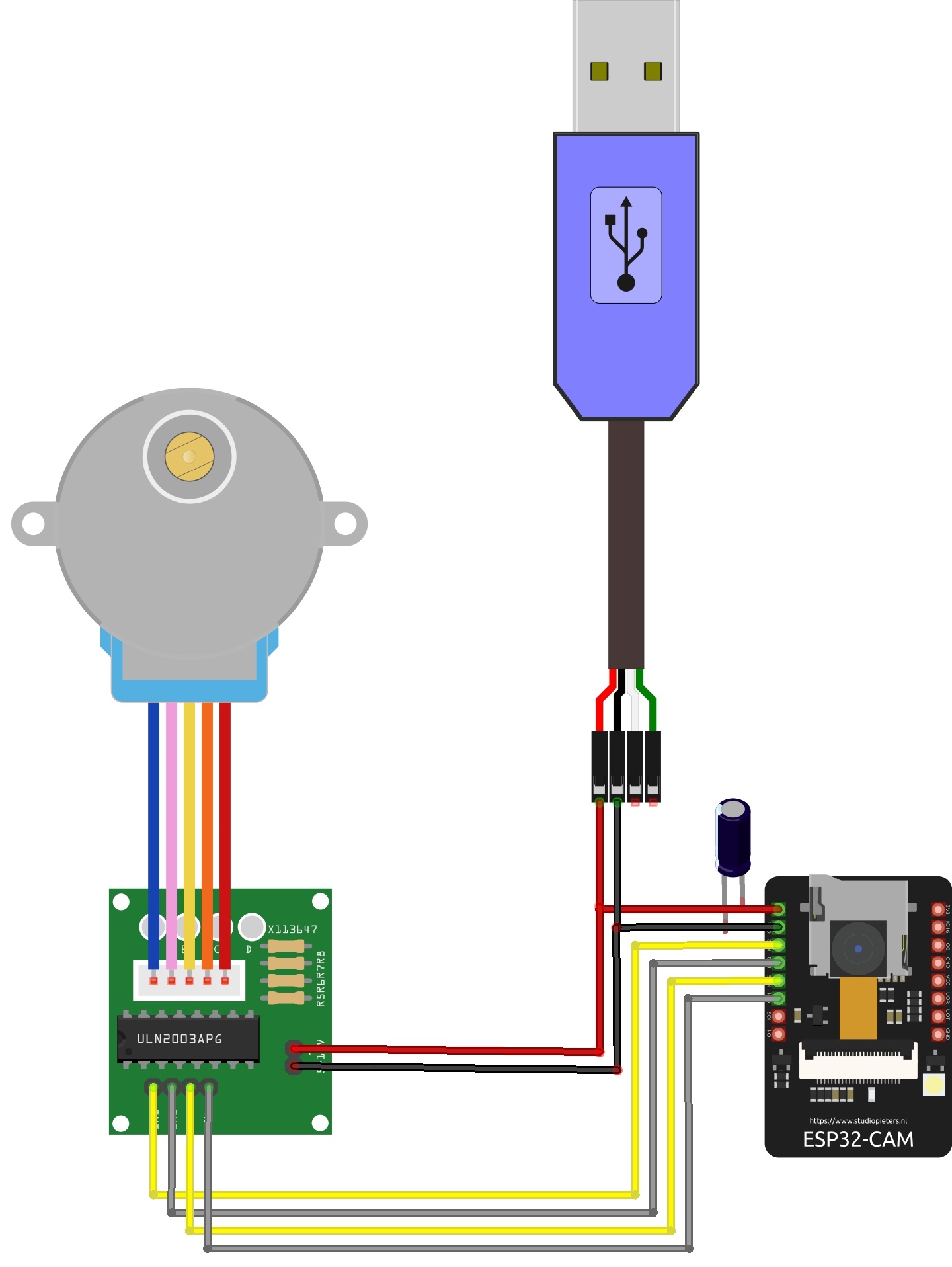
You need yo solders the headers to the pcb, six cables: 2 for power (VCC and GND) and four for control the stepper motor. I put small capacitor in the power connector of the ESP32-CAM.
Step 2
I presented the engine in the 3D model, a mark where the screws will be. Then use the drill to make the holes.
Step 3
Be sure to run the wires through the 3d piece before crimping the connectors.
Step 4
From the usb pcb you have to have two power cables, VCC / GND for the ULN2003, and VCC / GND for the ESP32-CAM.
Step 5



{kind=link}
Comments
Please log in or sign up to comment.