

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
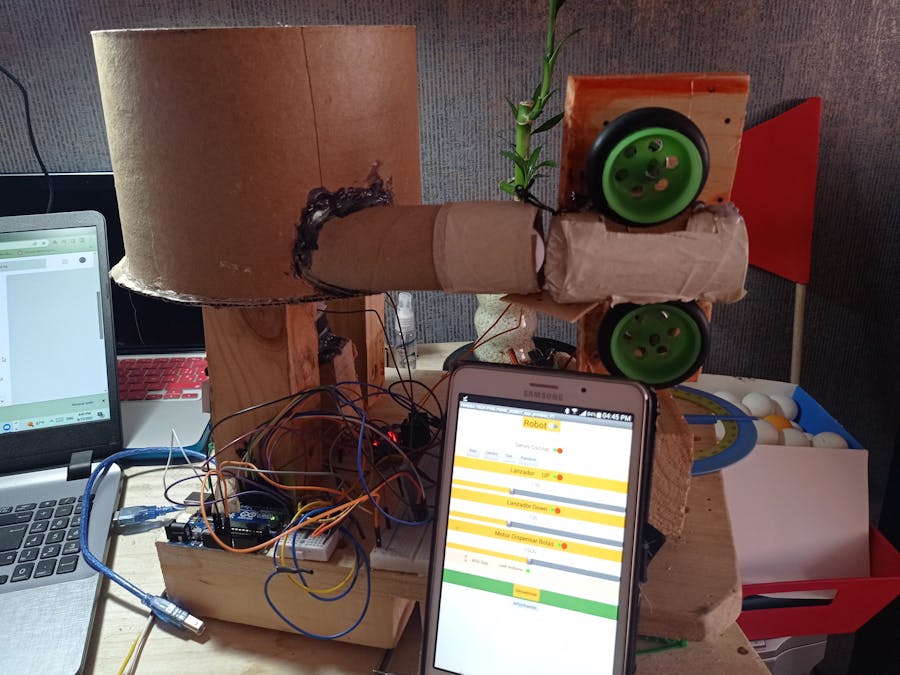
This project is about a TTR(Table Tennis Robot) made at home with cardboard and wood, using some electronics and Arduino. I found various videos and get inspired because the interactivity of this robot, the Table Tennis sport and the call to action this machine produce is awesome.
I am happy for this TTR DIY, and really gave me a lot of fun. Even I was looking for a lot of mechanics I tried to use arduino and electronics and one App, developed with MIT APP Inventor, as the Basis of Design.
Aesthetics and finishings could have deficiencies: a lot of glue, everywhere, some card board recycled, tapes and pieces on wood as simple as possible. Material cost estimated in 60US$.As always man labour cost is hard to estimate because I enjoy doing projects as hobbist.
StepsStep 1:Survey, Check a lot of other TTR models availables on internet to establish a concept for design(Basis of Design)
Step 2: To establish location for the balls feeder as center of the design- Stepper motor o motor with gears are options. I decided stepper, after check, for make easy the controls in the development (it is no as true and real as I was thinking at the start).
Step 3: Define the outlet duct section location and capabilites to move left/right/center , be careful selecting this location because tangent is quite importat to avoid ball stucked and overload for the ball feeder motor. In this case,the oultet hole of the feeder was no correct and this request torque in excess to the stepper motor, producing stucking of balls.
Step 4: Define strategy to move the section duct in order to get different directions of the ball. Wide Output angle for the ball will give us a lot of option to play with this TTR. However there is a angle limit constrained by de dimensions of the table and the location of the robot.
Step 5: Define motors location to produce the spin effect and launch the balls
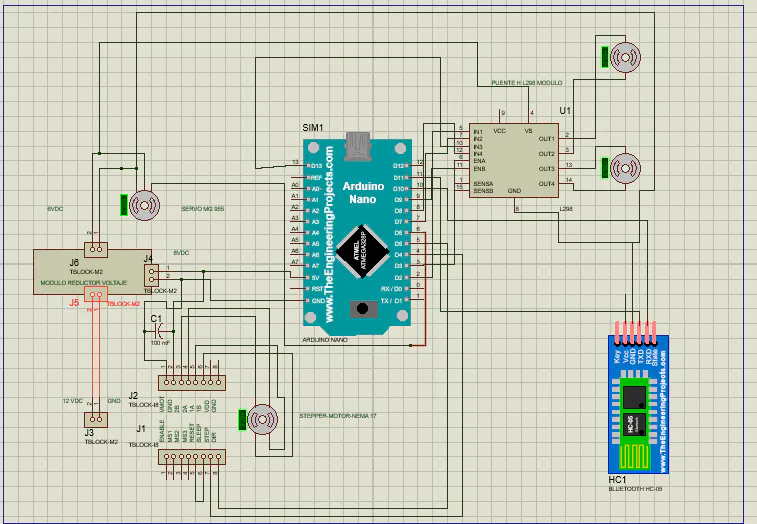
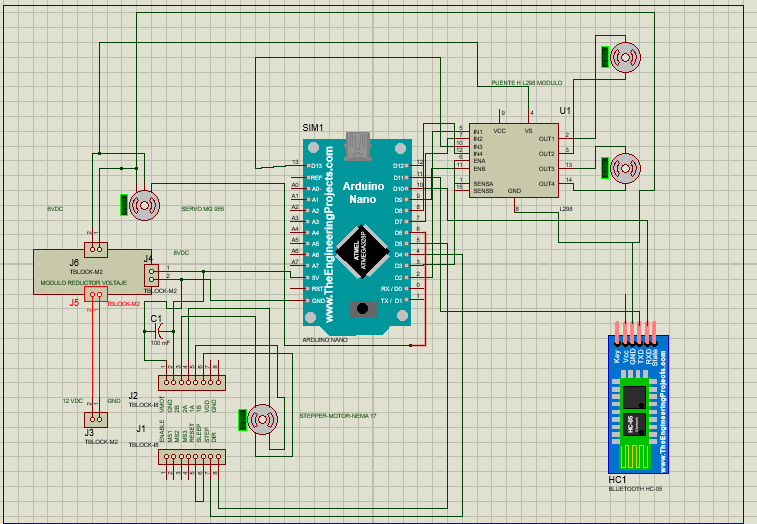
Step 6: Electronics
Step 7: Integration
The TTR is controlled by the electronics devices, arduino and one APP developed FFP(fit for porpuse)
Step 8: APP
Step 9: Field Test ( A lot of fun and interactivity)
Action for Fun #1
Action for Fun # 2
Action for Fun # 3 - Balls and more balls operations
Action for Fun # 4. Table
In the near future, I will upload the video in a table tennis training


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)



{kind=link}
Comments