#include<Servo.h>
Servo s1,s2;
void setup() {
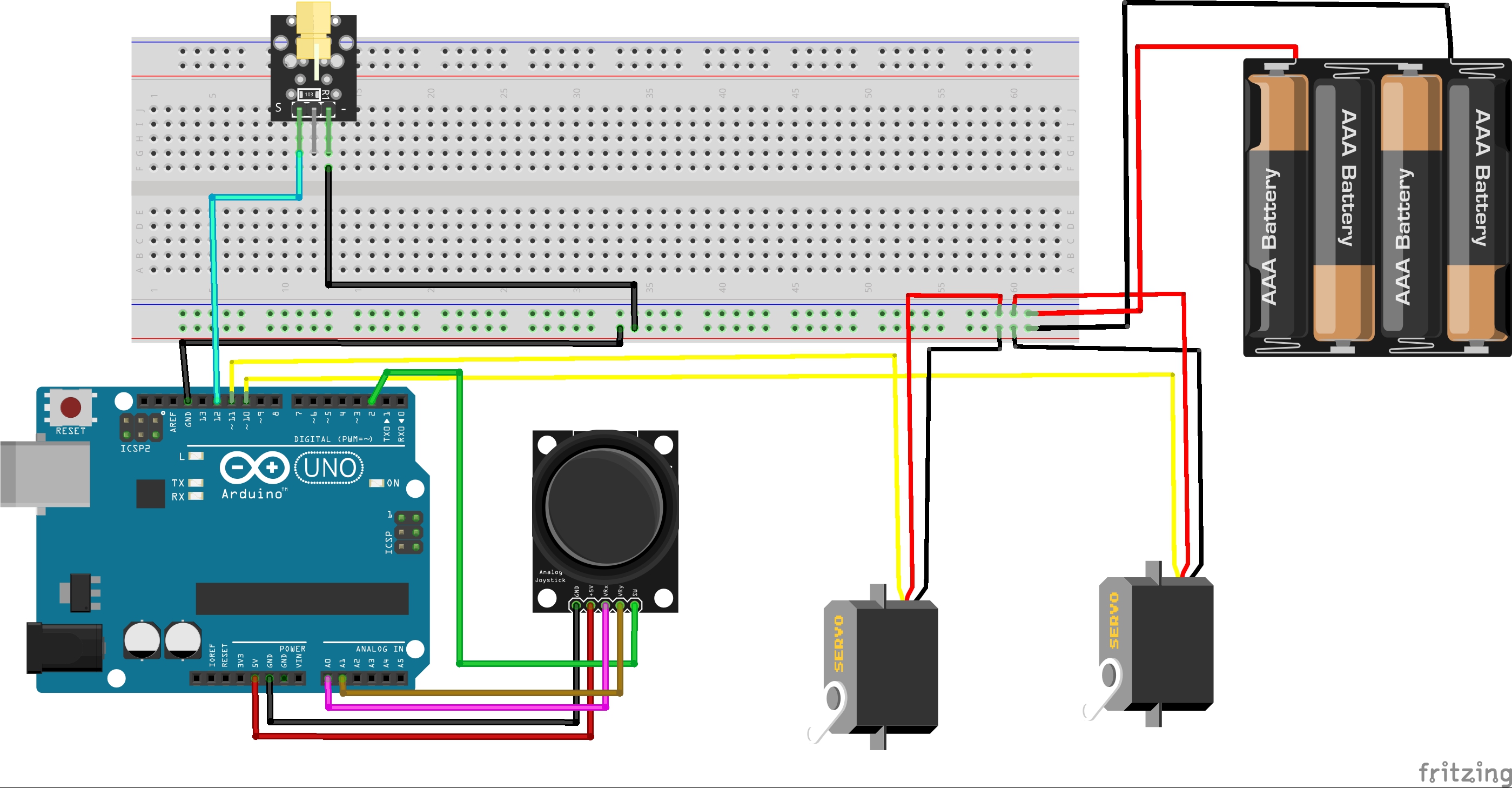
s1.attach(10);
s2.attach(11);
pinMode(12,OUTPUT);
pinMode(2,INPUT);
digitalWrite(2,HIGH);
Serial.begin(9600);
}
int p1=90,p2=90;
void loop()
{
int t1=0,t2=0;
int a=analogRead(A0);
int b=analogRead(A1);
if(a<=450 or a>=550)
{
t1=map(a,0,1023,10,-10);
p1=change(p1,t1);
}
if(b<=450 or b>=550)
{
t2=map(b,0,1023,-10,10);
p2=change(p2,t2);
}
s1.write(p1);
s2.write(p2);
if(digitalRead(2)==LOW)
digitalWrite(12,HIGH);
else
digitalWrite(12,LOW);
Serial.print("s1:");
Serial.print(a);
Serial.print("\t");
Serial.print("s2:");
Serial.print(b);
Serial.print("\t");
Serial.print("t1:");
Serial.print(t1);
Serial.print("\t");
Serial.print("t2:");
Serial.print(t2);
Serial.print("\t");
Serial.print("pos1: ");
Serial.print(p1);
Serial.print("pos2: ");
Serial.println(p2);
delay(70);
}
int change(int pos,int t)
{
pos=pos+t;
if (pos>180)
pos=180;
if(pos<0)
pos=0;
return(pos);
}








_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



{kind=link}
Comments
Please log in or sign up to comment.