

Hardware components | ||||||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
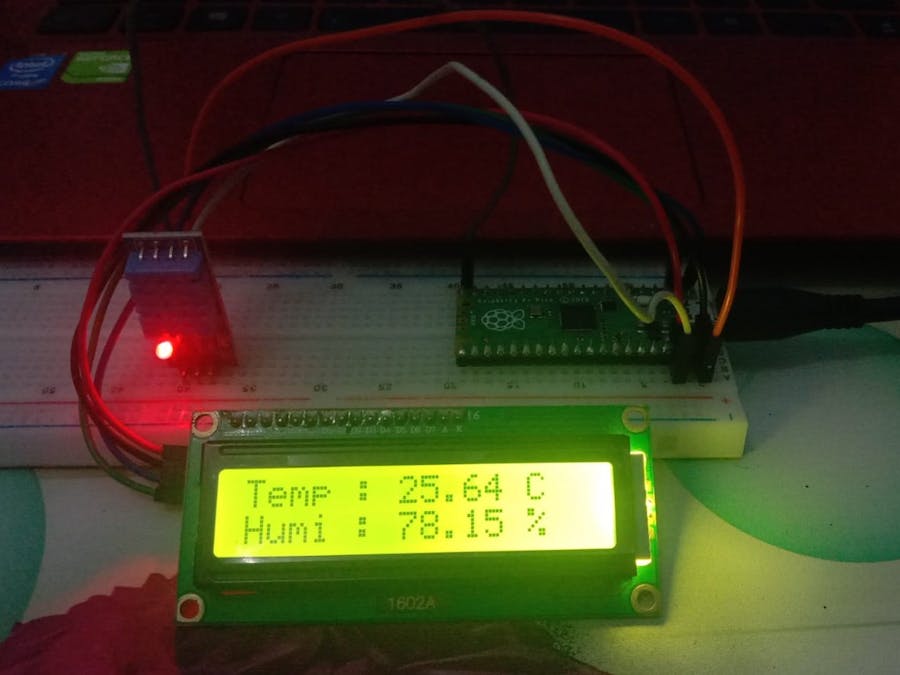
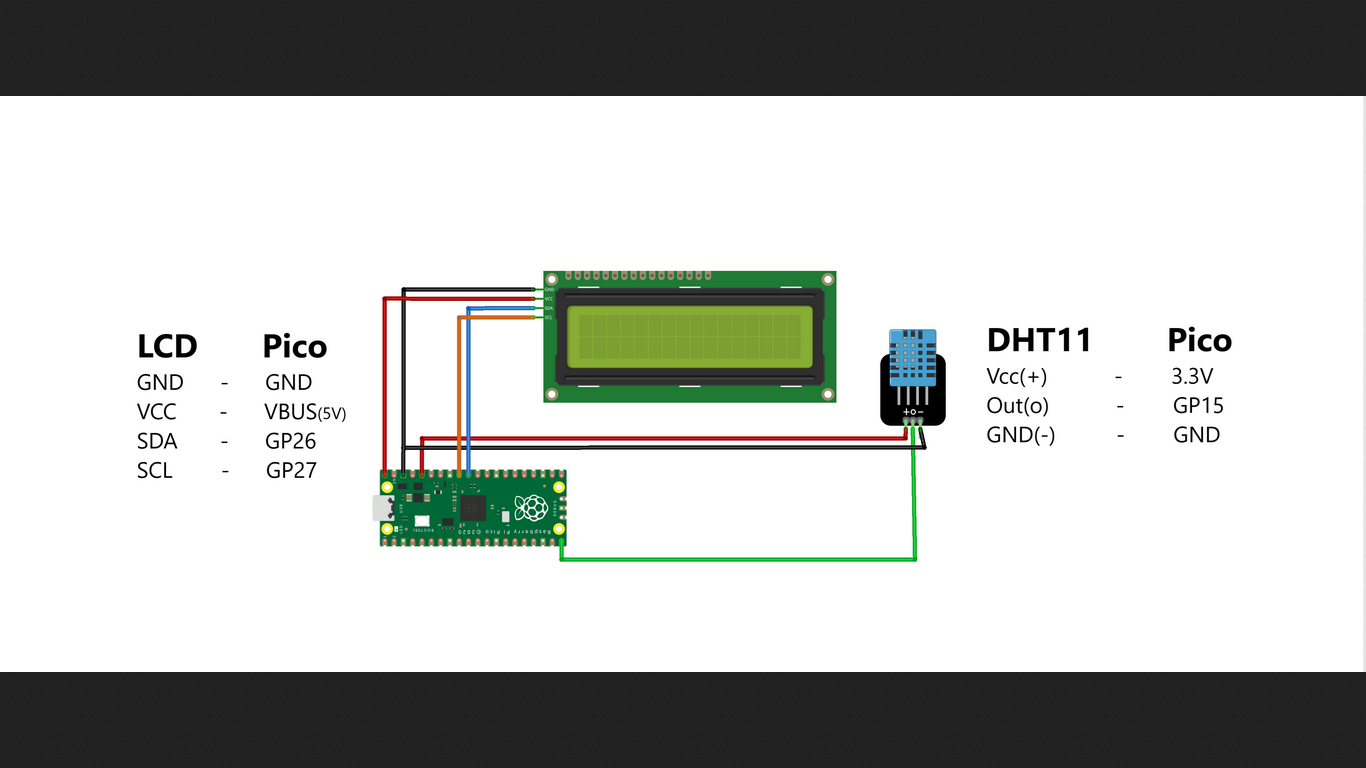
The project that I am currently working on is monitoring room temperature using a Raspberry Pi Pico, this tool is very useful for knowing the temperature and humidity in the room. This tool also uses a dht 11 sensor, where the DHT sensor is a sensor package that functions to measure air temperature and humidity as well as in which there is an NTC (Negative Temperature Coefficient) type thermistor to measure temperature, a humidity sensor with resistive characteristics to changes in water content in the air. and there is a chip inside that performs some analog-to-digital conversions and outputs a single-wire bi-directional format.
besides Dht 11 I also use a 16 x 2 Lcd for the output display which is a data viewer module that uses liquid crystal as a material for displaying data in the form of writing or images.
import array
import micropython
import utime
from machine import Pin
from micropython import const
class InvalidChecksum(Exception):
pass
class InvalidPulseCount(Exception):
pass
MAX_UNCHANGED = const(100)
MIN_INTERVAL_US = const(200000)
HIGH_LEVEL = const(50)
EXPECTED_PULSES = const(84)
class DHT11:
_temperature: float
_humidity: float
def __init__(self, pin):
self._pin = pin
self._last_measure = utime.ticks_us()
self._temperature = -1
self._humidity = -1
def measure(self):
current_ticks = utime.ticks_us()
if utime.ticks_diff(current_ticks, self._last_measure) < MIN_INTERVAL_US and (
self._temperature > -1 or self._humidity > -1
):
# Less than a second since last read, which is too soon according
# to the datasheet
return
self._send_init_signal()
pulses = self._capture_pulses()
buffer = self._convert_pulses_to_buffer(pulses)
self._verify_checksum(buffer)
self._humidity = buffer[0] + buffer[1] / 10
self._temperature = buffer[2] + buffer[3] / 10
self._last_measure = utime.ticks_us()
@property
def humidity(self):
self.measure()
return self._humidity
@property
def temperature(self):
self.measure()
return self._temperature
def _send_init_signal(self):
self._pin.init(Pin.OUT, Pin.PULL_DOWN)
self._pin.value(1)
utime.sleep_ms(50)
self._pin.value(0)
utime.sleep_ms(18)
@micropython.native
def _capture_pulses(self):
pin = self._pin
pin.init(Pin.IN, Pin.PULL_UP)
val = 1
idx = 0
transitions = bytearray(EXPECTED_PULSES)
unchanged = 0
timestamp = utime.ticks_us()
while unchanged < MAX_UNCHANGED:
if val != pin.value():
if idx >= EXPECTED_PULSES:
raise InvalidPulseCount(
"Got more than {} pulses".format(EXPECTED_PULSES)
)
now = utime.ticks_us()
transitions[idx] = now - timestamp
timestamp = now
idx += 1
val = 1 - val
unchanged = 0
else:
unchanged += 1
pin.init(Pin.OUT, Pin.PULL_DOWN)
if idx != EXPECTED_PULSES:
raise InvalidPulseCount(
"Expected {} but got {} pulses".format(EXPECTED_PULSES, idx)
)
return transitions[4:]
def _convert_pulses_to_buffer(self, pulses):
"""Convert a list of 80 pulses into a 5 byte buffer
The resulting 5 bytes in the buffer will be:
0: Integral relative humidity data
1: Decimal relative humidity data
2: Integral temperature data
3: Decimal temperature data
4: Checksum
"""
# Convert the pulses to 40 bits
binary = 0
for idx in range(0, len(pulses), 2):
binary = binary << 1 | int(pulses[idx] > HIGH_LEVEL)
# Split into 5 bytes
buffer = array.array("B")
for shift in range(4, -1, -1):
buffer.append(binary >> shift * 8 & 0xFF)
return buffer
def _verify_checksum(self, buffer):
# Calculate checksum
checksum = 0
for buf in buffer[0:4]:
checksum += buf
if checksum & 0xFF != buffer[4]:
raise InvalidChecksum()
import time
class LcdApi:
# Implements the API for talking with HD44780 compatible character LCDs.
# This class only knows what commands to send to the LCD, and not how to get
# them to the LCD.
#
# It is expected that a derived class will implement the hal_xxx functions.
#
# The following constant names were lifted from the avrlib lcd.h header file,
# with bit numbers changed to bit masks.
# HD44780 LCD controller command set
LCD_CLR = 0x01 # DB0: clear display
LCD_HOME = 0x02 # DB1: return to home position
LCD_ENTRY_MODE = 0x04 # DB2: set entry mode
LCD_ENTRY_INC = 0x02 # DB1: increment
LCD_ENTRY_SHIFT = 0x01 # DB0: shift
LCD_ON_CTRL = 0x08 # DB3: turn lcd/cursor on
LCD_ON_DISPLAY = 0x04 # DB2: turn display on
LCD_ON_CURSOR = 0x02 # DB1: turn cursor on
LCD_ON_BLINK = 0x01 # DB0: blinking cursor
LCD_MOVE = 0x10 # DB4: move cursor/display
LCD_MOVE_DISP = 0x08 # DB3: move display (0-> move cursor)
LCD_MOVE_RIGHT = 0x04 # DB2: move right (0-> left)
LCD_FUNCTION = 0x20 # DB5: function set
LCD_FUNCTION_8BIT = 0x10 # DB4: set 8BIT mode (0->4BIT mode)
LCD_FUNCTION_2LINES = 0x08 # DB3: two lines (0->one line)
LCD_FUNCTION_10DOTS = 0x04 # DB2: 5x10 font (0->5x7 font)
LCD_FUNCTION_RESET = 0x30 # See "Initializing by Instruction" section
LCD_CGRAM = 0x40 # DB6: set CG RAM address
LCD_DDRAM = 0x80 # DB7: set DD RAM address
LCD_RS_CMD = 0
LCD_RS_DATA = 1
LCD_RW_WRITE = 0
LCD_RW_READ = 1
def __init__(self, num_lines, num_columns):
self.num_lines = num_lines
if self.num_lines > 4:
self.num_lines = 4
self.num_columns = num_columns
if self.num_columns > 40:
self.num_columns = 40
self.cursor_x = 0
self.cursor_y = 0
self.implied_newline = False
self.backlight = True
self.display_off()
self.backlight_on()
self.clear()
self.hal_write_command(self.LCD_ENTRY_MODE | self.LCD_ENTRY_INC)
self.hide_cursor()
self.display_on()
def clear(self):
# Clears the LCD display and moves the cursor to the top left corner
self.hal_write_command(self.LCD_CLR)
self.hal_write_command(self.LCD_HOME)
self.cursor_x = 0
self.cursor_y = 0
def show_cursor(self):
# Causes the cursor to be made visible
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY |
self.LCD_ON_CURSOR)
def hide_cursor(self):
# Causes the cursor to be hidden
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY)
def blink_cursor_on(self):
# Turns on the cursor, and makes it blink
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY |
self.LCD_ON_CURSOR | self.LCD_ON_BLINK)
def blink_cursor_off(self):
# Turns on the cursor, and makes it no blink (i.e. be solid)
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY |
self.LCD_ON_CURSOR)
def display_on(self):
# Turns on (i.e. unblanks) the LCD
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY)
def display_off(self):
# Turns off (i.e. blanks) the LCD
self.hal_write_command(self.LCD_ON_CTRL)
def backlight_on(self):
# Turns the backlight on.
# This isn't really an LCD command, but some modules have backlight
# controls, so this allows the hal to pass through the command.
self.backlight = True
self.hal_backlight_on()
def backlight_off(self):
# Turns the backlight off.
# This isn't really an LCD command, but some modules have backlight
# controls, so this allows the hal to pass through the command.
self.backlight = False
self.hal_backlight_off()
def move_to(self, cursor_x, cursor_y):
# Moves the cursor position to the indicated position. The cursor
# position is zero based (i.e. cursor_x == 0 indicates first column).
self.cursor_x = cursor_x
self.cursor_y = cursor_y
addr = cursor_x & 0x3f
if cursor_y & 1:
addr += 0x40 # Lines 1 & 3 add 0x40
if cursor_y & 2: # Lines 2 & 3 add number of columns
addr += self.num_columns
self.hal_write_command(self.LCD_DDRAM | addr)
def putchar(self, char):
# Writes the indicated character to the LCD at the current cursor
# position, and advances the cursor by one position.
if char == '\n':
if self.implied_newline:
# self.implied_newline means we advanced due to a wraparound,
# so if we get a newline right after that we ignore it.
pass
else:
self.cursor_x = self.num_columns
else:
self.hal_write_data(ord(char))
self.cursor_x += 1
if self.cursor_x >= self.num_columns:
self.cursor_x = 0
self.cursor_y += 1
self.implied_newline = (char != '\n')
if self.cursor_y >= self.num_lines:
self.cursor_y = 0
self.move_to(self.cursor_x, self.cursor_y)
def putstr(self, string):
# Write the indicated string to the LCD at the current cursor
# position and advances the cursor position appropriately.
for char in string:
self.putchar(char)
def custom_char(self, location, charmap):
# Write a character to one of the 8 CGRAM locations, available
# as chr(0) through chr(7).
location &= 0x7
self.hal_write_command(self.LCD_CGRAM | (location << 3))
self.hal_sleep_us(40)
for i in range(8):
self.hal_write_data(charmap[i])
self.hal_sleep_us(40)
self.move_to(self.cursor_x, self.cursor_y)
def hal_backlight_on(self):
# Allows the hal layer to turn the backlight on.
# If desired, a derived HAL class will implement this function.
pass
def hal_backlight_off(self):
# Allows the hal layer to turn the backlight off.
# If desired, a derived HAL class will implement this function.
pass
def hal_write_command(self, cmd):
# Write a command to the LCD.
# It is expected that a derived HAL class will implement this function.
raise NotImplementedError
def hal_write_data(self, data):
# Write data to the LCD.
# It is expected that a derived HAL class will implement this function.
raise NotImplementedError
def hal_sleep_us(self, usecs):
# Sleep for some time (given in microseconds)
time.sleep_us(usecs)
import utime
from lcd_api import LcdApi
from machine import I2C,Pin,ADC
from pico_i2c_lcd import I2cLcd
I2C_ADDR=0x27
I2C_NUM_ROWS= 4
I2C_NUM_COLS= 20
sense_temp=ADC(4)
conversion_factor=3.3/65535
i2c=I2C(0,sda=Pin(0),scl=Pin(1),freq=400000)
lcd = I2cLcd(i2c, I2C_ADDR, I2C_NUM_ROWS, I2C_NUM_COLS)
while True:
voltage=sense_temp.read_u16()*conversion_factor
temp_C=27-(voltage-0.706)/0.001721
print(temp_C)
temp_F= (temp_C*9/5)+32
print(temp_F)
lcd.clear()
lcd.move_to(0,0)
lcd.putstr("Temp : {0:5.2f} C".format(temp_C))
lcd.move_to(0,1)
lcd.putstr("Humi : {0:5.2f} %" .format(temp_F))
utime.sleep(2)
import utime
from lcd_api import LcdApi
from machine import I2C
# PCF8574 pin definitions
MASK_RS = 0x01 # P0
MASK_RW = 0x02 # P1
MASK_E = 0x04 # P2
SHIFT_BACKLIGHT = 3 # P3
SHIFT_DATA = 4 # P4-P7
class I2cLcd(LcdApi):
#Implements a HD44780 character LCD connected via PCF8574 on I2C
def __init__(self, i2c, i2c_addr, num_lines, num_columns):
self.i2c = i2c
self.i2c_addr = i2c_addr
self.i2c.writeto(self.i2c_addr, bytes([0]))
utime.sleep_ms(20) # Allow LCD time to powerup
# Send reset 3 times
self.hal_write_init_nibble(self.LCD_FUNCTION_RESET)
utime.sleep_ms(5) # Need to delay at least 4.1 msec
self.hal_write_init_nibble(self.LCD_FUNCTION_RESET)
utime.sleep_ms(1)
self.hal_write_init_nibble(self.LCD_FUNCTION_RESET)
utime.sleep_ms(1)
# Put LCD into 4-bit mode
self.hal_write_init_nibble(self.LCD_FUNCTION)
utime.sleep_ms(1)
LcdApi.__init__(self, num_lines, num_columns)
cmd = self.LCD_FUNCTION
if num_lines > 1:
cmd |= self.LCD_FUNCTION_2LINES
self.hal_write_command(cmd)
def hal_write_init_nibble(self, nibble):
# Writes an initialization nibble to the LCD.
# This particular function is only used during initialization.
byte = ((nibble >> 4) & 0x0f) << SHIFT_DATA
self.i2c.writeto(self.i2c_addr, bytes([byte | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytes([byte]))
def hal_backlight_on(self):
# Allows the hal layer to turn the backlight on
self.i2c.writeto(self.i2c_addr, bytes([1 << SHIFT_BACKLIGHT]))
def hal_backlight_off(self):
#Allows the hal layer to turn the backlight off
self.i2c.writeto(self.i2c_addr, bytes([0]))
def hal_write_command(self, cmd):
# Write a command to the LCD. Data is latched on the falling edge of E.
byte = ((self.backlight << SHIFT_BACKLIGHT) |
(((cmd >> 4) & 0x0f) << SHIFT_DATA))
self.i2c.writeto(self.i2c_addr, bytes([byte | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytes([byte]))
byte = ((self.backlight << SHIFT_BACKLIGHT) |
((cmd & 0x0f) << SHIFT_DATA))
self.i2c.writeto(self.i2c_addr, bytes([byte | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytes([byte]))
if cmd <= 3:
# The home and clear commands require a worst case delay of 4.1 msec
utime.sleep_ms(5)
def hal_write_data(self, data):
# Write data to the LCD. Data is latched on the falling edge of E.
byte = (MASK_RS |
(self.backlight << SHIFT_BACKLIGHT) |
(((data >> 4) & 0x0f) << SHIFT_DATA))
self.i2c.writeto(self.i2c_addr, bytes([byte | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytes([byte]))
byte = (MASK_RS |
(self.backlight << SHIFT_BACKLIGHT) |
((data & 0x0f) << SHIFT_DATA))
self.i2c.writeto(self.i2c_addr, bytes([byte | MAS


{kind=link}
Comments