#include <Servo.h>
//Initialize variables
int mode = 0;
int buttonState = 0;
int prevButtonState = 0;
int topLeftLight = 0;
int topRightLight = 0;
int bottomLeftLight = 0;
int bottomRightLight = 0;
int LeftLight = 0;
int RightLight = 0;
int TopLight = 0;
int BottomLight = 0;
//Declare two servos
Servo servo_9;
Servo servo_10;
void setup()
{
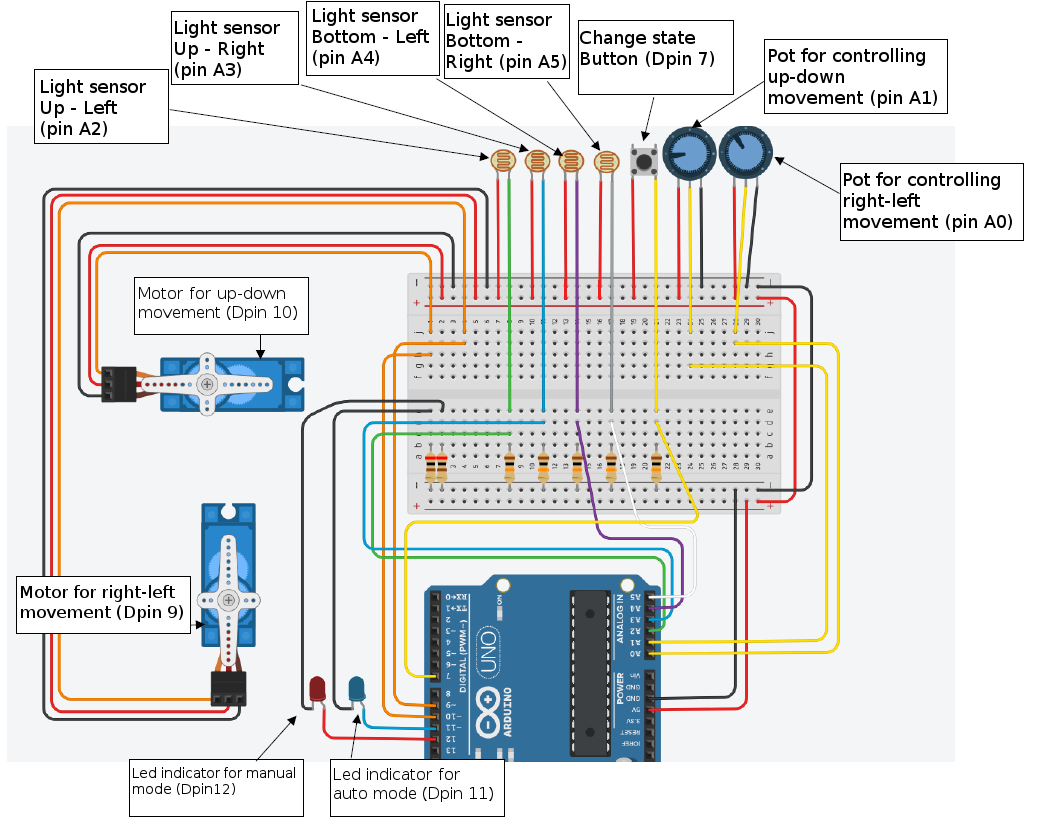
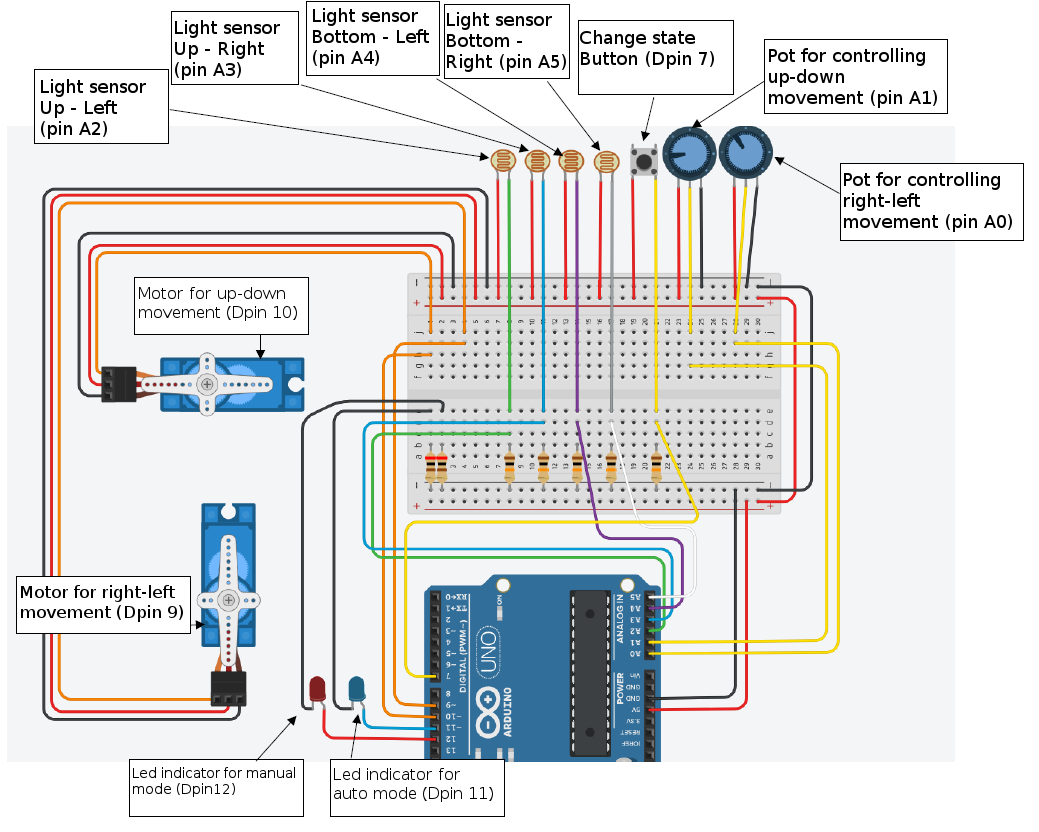
pinMode(7, INPUT); //Mode Button
pinMode(12, OUTPUT); //Led indicator for manual mode
pinMode(11, OUTPUT); //Led indicator for auto mode
pinMode(A0, INPUT); //Potentiometer for right-left movement
pinMode(A1, INPUT); //Potentiometer for up-down movement
pinMode(A2, INPUT); //Light sensor up - left
pinMode(A3, INPUT); //Light sensor up - right
pinMode(A4, INPUT); //Light sensor bottom - left
pinMode(A5, INPUT); //Light sensor bottom - right
servo_9.attach(9); //Servo motor right - left movement
servo_10.attach(10); //Servo motor up - down movement
}
void loop()
{
buttonState = digitalRead(7);
if (buttonState != prevButtonState) {
if (buttonState == HIGH) {
//Change mode and ligh up the correct indicator
if (mode == 1) {
mode = 0;
digitalWrite(12, HIGH);
digitalWrite(11, LOW);
} else {
mode = 1;
digitalWrite(11, HIGH);
digitalWrite(12, LOW);
}
}
}
prevButtonState = buttonState;
delay(50); // Wait for 50 millisecond(s)
if (mode == 0) {
//If mode is manual map the pot values to degrees of rotation
servo_9.write(map(analogRead(A0), 0, 1023, 0, 180));
servo_10.write(map(analogRead(A1), 0, 1023, 0, 180));
} else {
//if mode is auto map the sensor values to 0-100 ligh intensity.
//Every light sensor has different sensitivity and must be first tested
//for it's high and low values
topLeftLight = map(analogRead(A2),50,980,0,100);
topRightLight = map(analogRead(A3),200,990,0,100);
bottomLeftLight = map(analogRead(A4),170,970,0,100);
bottomRightLight = map(analogRead(A5),250,1000,0,100);
//Calculate the average light conditions
TopLight = ((topRightLight + topLeftLight) / 2);
BottomLight = ((bottomRightLight + bottomLeftLight) / 2);
LeftLight = ((topLeftLight + bottomLeftLight) / 2);
RightLight = ((topRightLight + bottomRightLight) / 2);
//Rotate the servos if needed
if (abs((RightLight - LeftLight)) > 4) { //Change position only if light difference is bigger then 4%
if (RightLight < LeftLight) {
if (servo_9.read() < 180) {
servo_9.write((servo_9.read() + 1));
}
}
if (RightLight > LeftLight) {
if (servo_9.read() > 0) {
servo_9.write((servo_9.read() - 1));
}
}
}
if (abs((TopLight - BottomLight)) > 4) { //Change position only if light difference is bigger then 4%
if (TopLight < BottomLight) {
if (servo_10.read() < 180) {
servo_10.write((servo_10.read() - 1));
}
}
if (TopLight > BottomLight) {
if (servo_10.read() > 0) {
servo_10.write((servo_10.read() + 1));
}
}
}
}
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments
Please log in or sign up to comment.