BackgroundImagine you are a busy person who wakes up in the morning and needs as much time as possible to prepare to leave and complete your important tasks. However, you also absolutely need to start your day off right with breakfast. The toaster takes forever to make toast and you don’t have time to make toast before starting your day. Now your day is ruined and it hasn’t even started yet! Our IOT project is designed to fix that problem with the power of Argons! We used three Argons that work with each other to automize the toasting process right when you wake up.
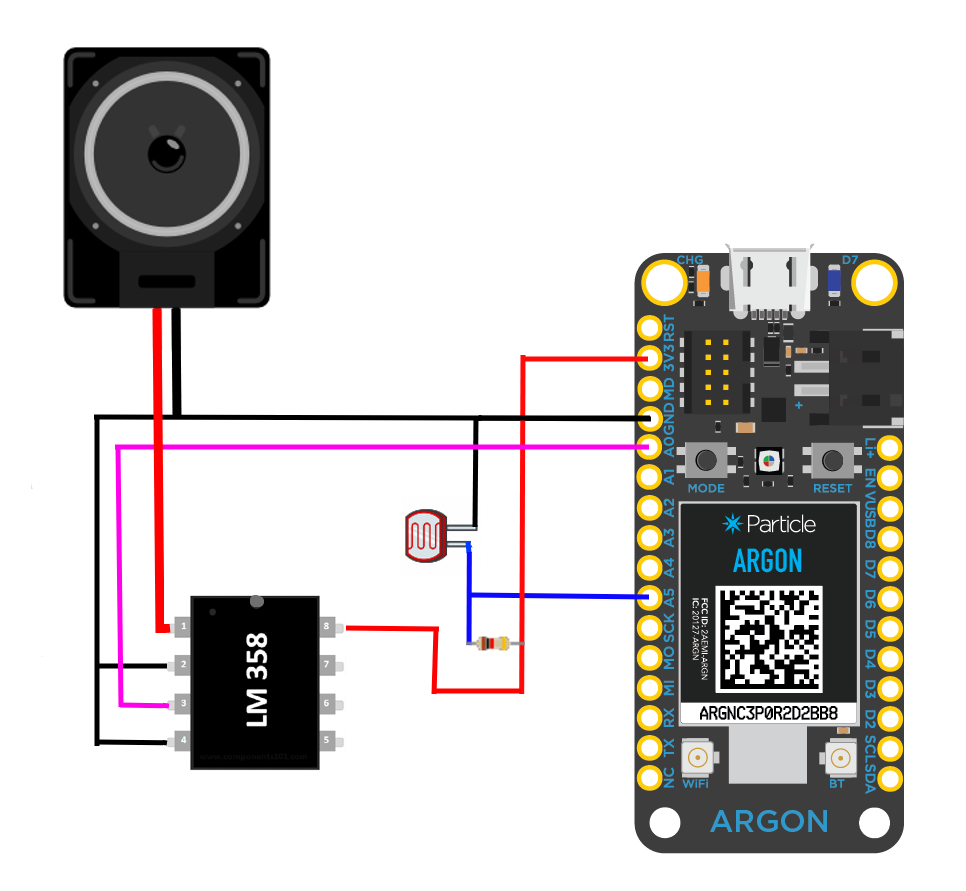
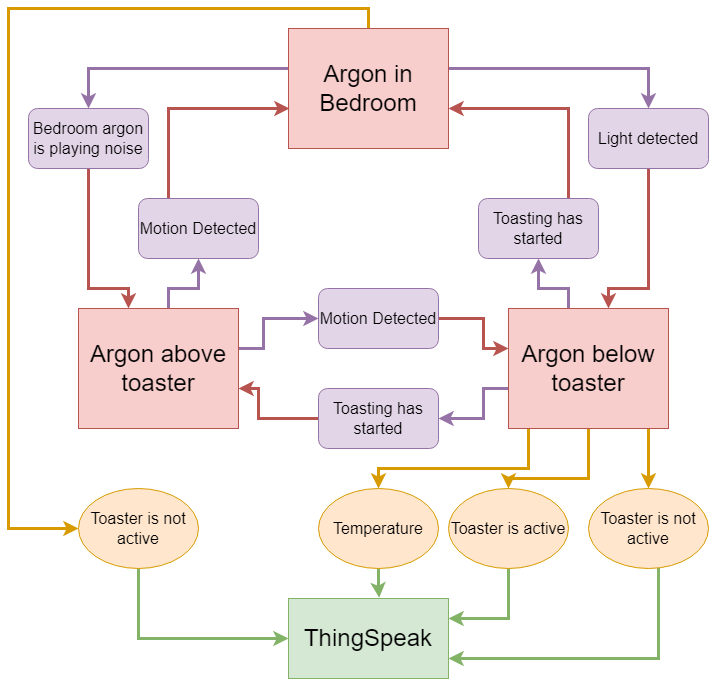
How it worksThe process starts when you turn on your lights in the morning. The first Argon used is connected to a photoresistor. This sensor is used to indicate when the lights in a room are on or off. When the user turns on a light, the photoresistor alerts the Argon which kicks off the next step by alerting the second argon.
Argon 1: Bedroom, photoresistor and speaker module
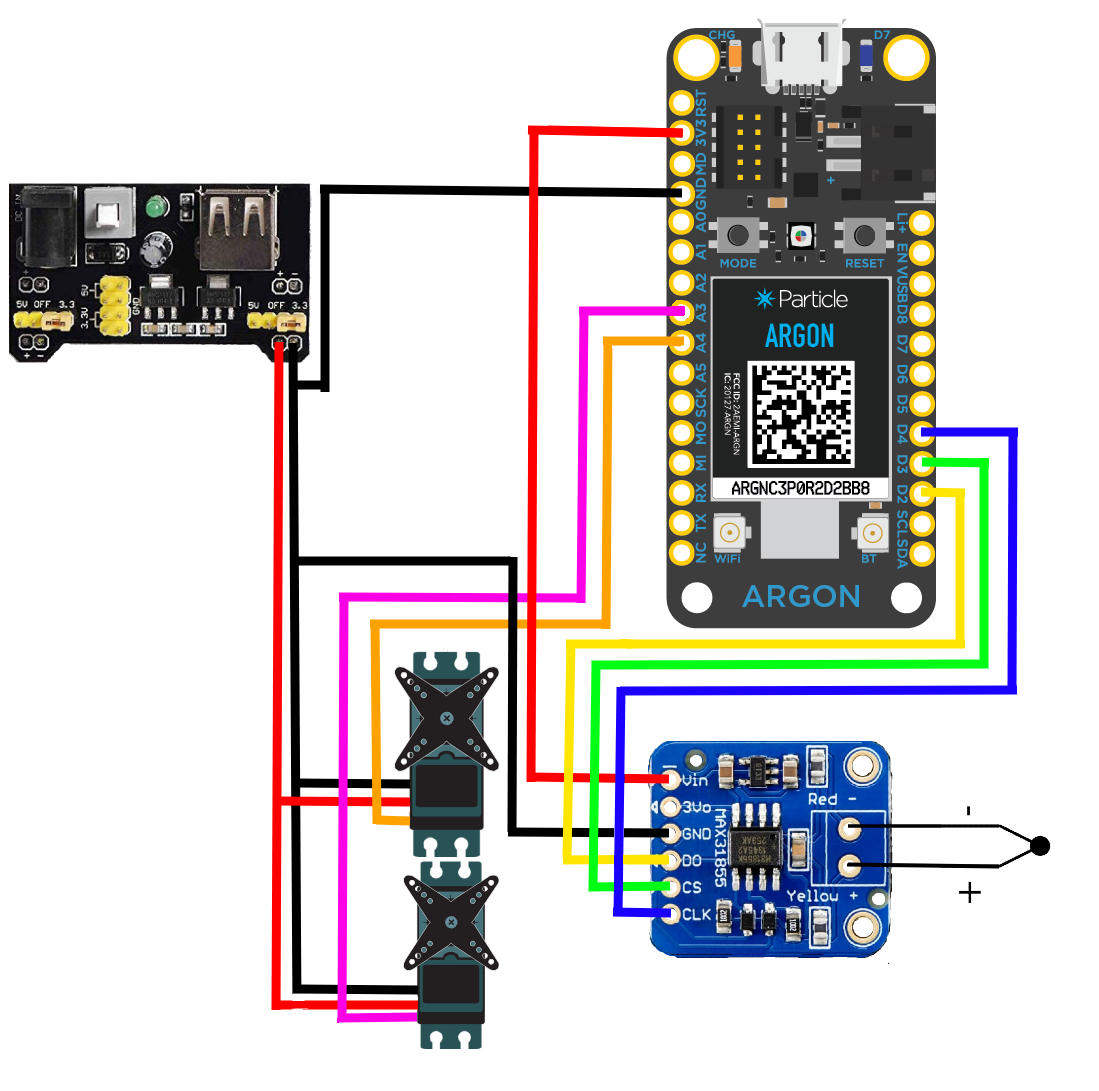
The next step in the process has the second argon turn on the servos at the base of the toaster. The servos start the toaster by pulling down the toaster handle. Once the toaster is started, it alerts both the first argon and the third argon. The first argon emits a beep to let the user know that their toast is started and turns on an led. The second argon also starts taking temperature readings every 4 seconds and sends them to Thinkspeak.
Argon 2: Bottom of the toaster, servos and themocouple module
Servos actuating the toaster
Thermocouple in the back of the toaster
When the third argon gets the alert from the second argon, the ultrasonic sensor turns on and starts looking for the toast to pop out. When the toast pops out the third argon alerts both the first and second argon. The first argon alerts the user to the end of this beautiful toasting process and starts emitting noise through the speaker and turns off the led. When the second argon gets the alert, it swaps to sending temperature readings every 30 minutes rather than every 4 seconds.
Argon 3: Top of the toaster, ultrasonic sensor
The red and green wires go to a 5 volt breadboard powersupply.
Full assembly of all toaster argon modules
Youtube VideoGraphsFull temperature curve from toaster
Temperature Thingspeak graph
Toaster status Thingspeak graph

_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
















_4jlrq5RAeX.png)











{kind=link}
{kind=link}
_4jlrq5RAeX.png){kind=link}
{kind=link}
Comments
Please log in or sign up to comment.