#include <analogWrite.h>
// --------------------------------------------------- DECLARATION TRASHSENSOR RELAY WITH SENSOR IR ----------------------------
//const int RELAY = 32;
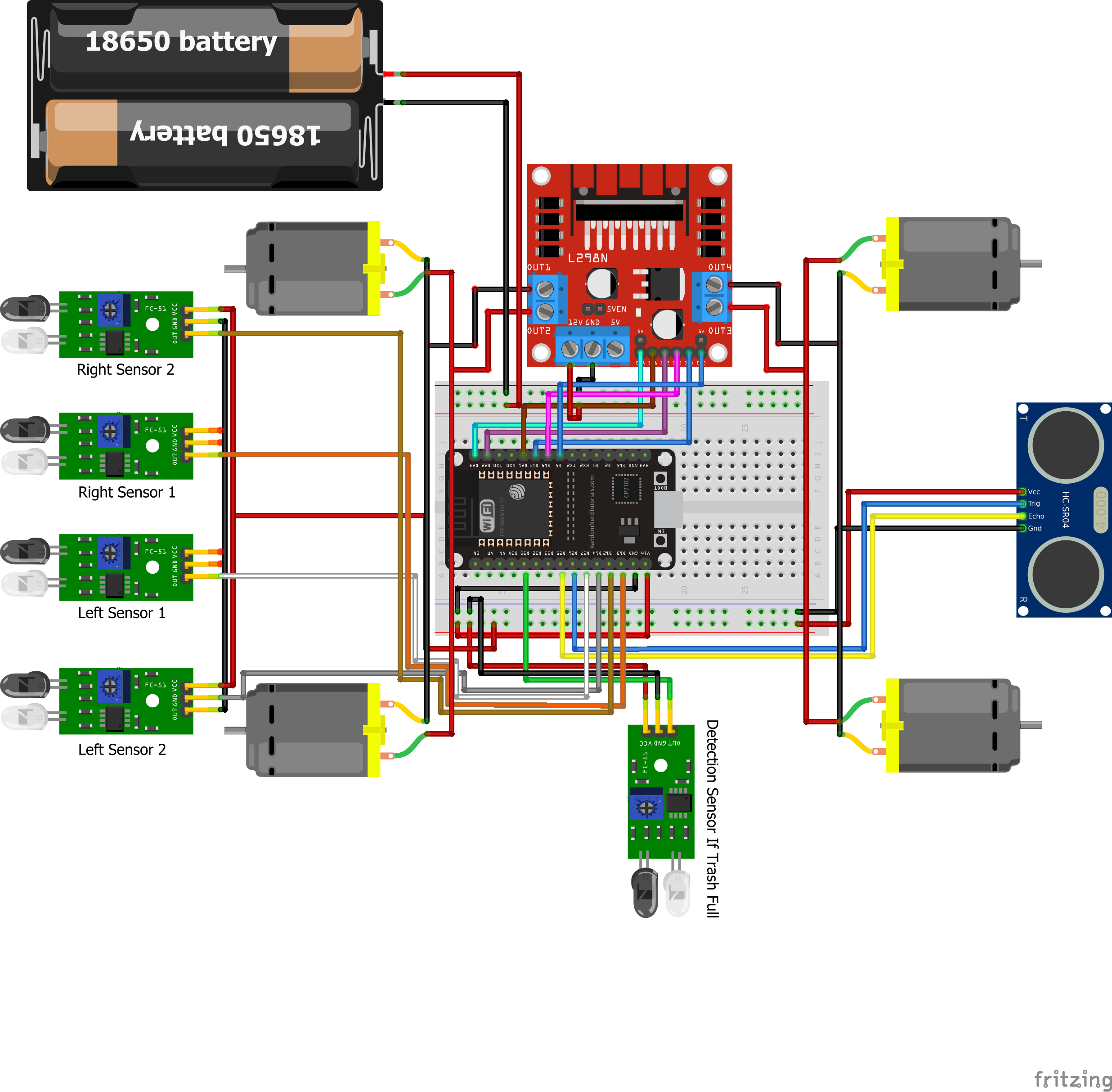
const int trashsensor = 35;
// --------------------------------------------------- IF THERE IS AN OBSTACLE STOP USING THE ULTRASONIC SENSOR ----------------
int TRIG = 26; // membuat varibel trig yang di set ke-pin D6
int ECHO = 25; // membuat variabel echo yang di set ke-pin D7
long duration, distance; // membuat variabel durasi dan jarak
// --------------------------------------------------- DECLARATION FRONT REAR MOTOR DC LEFT ------------------------------------
int frontleftmotorPin1 = 21;
int rearleftmotorPin2 = 22;
int enablePinA = 23;
// --------------------------------------------------- DECLARATION FRONT REAR MOTOR DC RIGHT -----------------------------------
int frontrightmotorPin1 = 18;
int rearrightmotorPin2 = 19;
int enablePinB = 5;
// --------------------------------------------------- DECLARATION SENSOR IR ---------------------------------------------------
int leftsensor1 = 27;
int leftsensor2 = 14;
int rightsensor1 = 13;
int rightsensor2 = 12;
// --------------------------------------------------- VOID SETUP --------------------------------------------------------------
void setup() {
// linefollow:
pinMode(enablePinA, OUTPUT);
pinMode(enablePinB, OUTPUT);
pinMode(leftsensor1, INPUT);
pinMode(leftsensor2, INPUT);
pinMode(rightsensor1, INPUT);
pinMode(rightsensor2, INPUT);
pinMode(frontleftmotorPin1, OUTPUT);
pinMode(rearleftmotorPin2, OUTPUT);
pinMode(frontrightmotorPin1, OUTPUT);
pinMode(rearrightmotorPin2, OUTPUT);
// setup pin relay with sensor IR
pinMode(trashsensor, INPUT);
//pinMode(RELAY, OUTPUT);
//digitalWrite(RELAY, HIGH);
// setup pin sensor ultrasonik
pinMode(TRIG, OUTPUT); // set pin trig menjadi OUTPUT
pinMode(ECHO, INPUT); // set pin echo menjadi
Serial.begin(115200);
}
// --------------------------------------------------- VOID FUNCTION -----------------------------------------------------------
void maju (void) {
digitalWrite(frontleftmotorPin1,LOW);
digitalWrite(rearleftmotorPin2,HIGH);
digitalWrite(frontrightmotorPin1,HIGH);
digitalWrite(rearrightmotorPin2,LOW);
analogWrite (enablePinA, 150);
analogWrite (enablePinB, 150);
//delay(2);
}
void belokkanan (void) {
digitalWrite(frontleftmotorPin1,LOW);
digitalWrite(rearleftmotorPin2,HIGH);
digitalWrite(frontrightmotorPin1,LOW);
digitalWrite(rearrightmotorPin2,HIGH);
analogWrite (enablePinA, 150);
analogWrite (enablePinB, 150);
//delay(2);
}
void belokkiri (void) {
digitalWrite(frontleftmotorPin1,HIGH);
digitalWrite(rearleftmotorPin2,LOW);
digitalWrite(frontrightmotorPin1,HIGH);
digitalWrite(rearrightmotorPin2,LOW);
analogWrite (enablePinA, 150);
analogWrite (enablePinB, 150);
//delay(2);
}
void berhenti (void) {
digitalWrite(frontleftmotorPin1,LOW);
digitalWrite(rearleftmotorPin2,LOW);
digitalWrite(frontrightmotorPin1,LOW);
digitalWrite(rearrightmotorPin2,LOW);
analogWrite (enablePinA, 0);
analogWrite (enablePinB, 0);
}
void linefollow (void) {
int leftsensor1 = digitalRead(27);
int leftsensor2 = digitalRead(14);
int rightsensor1 = digitalRead(13);
int rightsensor2 = digitalRead(12);
/*if (leftsensor1 == LOW && leftsensor2 == LOW && rightsensor1 == LOW && rightsensor2 == LOW) {
maju ();
}*/
if (leftsensor1 == HIGH && leftsensor2 == LOW && rightsensor1 == LOW && rightsensor2 == LOW) {
belokkiri ();
}
if (leftsensor1 == LOW && leftsensor2 == LOW && rightsensor1 == LOW && rightsensor2 == HIGH) {
belokkanan ();
}
if (leftsensor1 == LOW && leftsensor2 == HIGH && rightsensor1 == LOW && rightsensor2 == LOW) {
belokkiri ();
}
if (leftsensor1 == LOW && leftsensor2 == LOW && rightsensor1 == HIGH && rightsensor2 == LOW) {
belokkanan ();
}
if (leftsensor1 == HIGH && leftsensor2 == HIGH && rightsensor1 == LOW && rightsensor2 == LOW) {
belokkiri ();
}
if (leftsensor1 == LOW && leftsensor2 == LOW && rightsensor1 == HIGH && rightsensor2 == HIGH) {
belokkanan ();
}
if (leftsensor1 == HIGH && leftsensor2 == HIGH && rightsensor1 == HIGH && rightsensor2 == HIGH) {
berhenti ();
}
}
void obstacleultrasonic (void) {
//obstacle ultrasonik
digitalWrite(TRIG, LOW);
delayMicroseconds(4);
digitalWrite(TRIG, HIGH);
delayMicroseconds(4);
digitalWrite(TRIG, LOW);
delayMicroseconds(4);
duration = pulseIn(ECHO, HIGH); // menerima suara ultrasonic
distance = (duration / 2) / 29.1; // mengubah durasi menjadi jarak (cm)
if (distance < 18){
berhenti ();
//Serial.println("There Are Obstacle Ahead");
delay(60);
}
else if (distance > 18) {
linefollow ();
//Serial.println("No Obstacle Ahead");
delay(60);
}
/*Serial.print("Jarak Benda: ");
Serial.print(distance); // menampilkan jarak pada serial monitor
Serial.println(" cm");
delay(500);*/
}
void trashsensordetect (void) {
int sensorState = digitalRead(trashsensor);
if (sensorState == LOW) {
maju ();
/*digitalWrite(RELAY, LOW);
Serial.println("Full Trash");*/
//delay(60);
}
else {
linefollow ();
/*digitalWrite(RELAY, HIGH);
Serial.println("Trash Not Full");*/
delay(60);
}
}
// --------------------------------------------------- VOID LOOP ---------------------------------------------------------------
void loop() {
//line follow
linefollow ();
//obstacle ultrasonic
obstacleultrasonic ();
//trashsensor
trashsensordetect ();
}




















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.