/*
* Project Capstone
* Description:
* Author: Isaac De leon
* Date:4/10/2023
*/
#include <JsonParserGeneratorRK.h>
#include <Particle.h>
#include <Wire.h>
#include <math.h>
#include <neopixel.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_MQTT.h>
#include "cred.h"
#include "Adafruit_MQTT/Adafruit_MQTT_SPARK.h"
#include "Adafruit_MQTT/Adafruit_MQTT.h"
#include "Adafruit_SSD1306.h"
#include "Adafruit_BME280.h"
#include "colors.h"
#include "IoTClassroom_CNM.h"
#include "HX711.h"
#include "DS18B20.h"
#define OLED_RESET D4
#define Addr 0x2A
IoTTimer timer;
TCPClient TheClient;
// Setup the MQTT client class by passing in the WiFi client, MQTT server, and login details
Adafruit_MQTT_SPARK mqtt(&TheClient,AIO_SERVER,AIO_SERVERPORT,AIO_USERNAME,AIO_KEY);
/****************************** Feeds ***************************************/
// Setup a feed called <object> for publishing.
// Notice MQTT paths for AIO follow the form: <username>/feeds/<feedname>
//Adafruit_MQTT_Publish theTempuratureObject = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/Feed2_Tempurature");
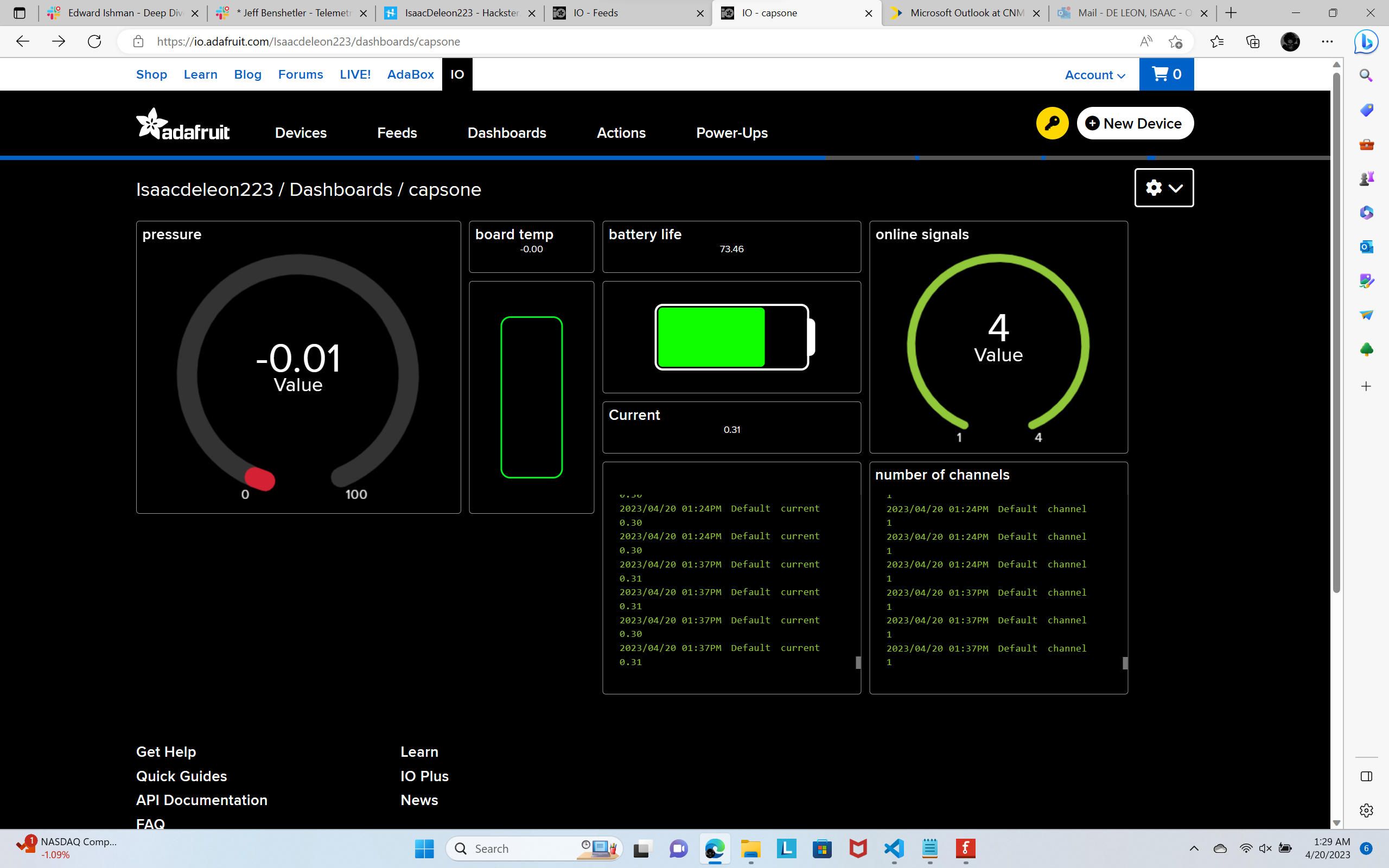
Adafruit_MQTT_Publish theCurrentSensorOneStateObject = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/CurrentSensorOneState");
Adafruit_MQTT_Publish theCurrentSensorOneActualValue = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/CurrentSensorOneActualValue");
Adafruit_MQTT_Publish theCurrentSensorTwoStateObject = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/CurrentSensorTwoState");
Adafruit_MQTT_Publish theCurrentSensorTwoActualValue = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/CurrentSensorTwoActualValue");
Adafruit_MQTT_Publish pubTemp = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/temp");
Adafruit_MQTT_Publish pubcurrent = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/current");
Adafruit_MQTT_Publish pubBtemp = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/btemp");
Adafruit_MQTT_Publish pubother = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/other");
Adafruit_MQTT_Publish pubpsi = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/other");
Adafruit_MQTT_Publish pubtype = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/type");
Adafruit_MQTT_Publish pubmax = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/max");
Adafruit_MQTT_Publish pubchannel = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/channel");
float var_SensorValueToPublish;
float var_SensorActualValue;
// Adafruit.io Set Up END
// For the neopixels: Pixel 0 is for sensor one, pixel 1 is for sensor two
const int PIN = 2; // Pin 2 on Argon for output signal to neopixels
const int NUMPIXELS = 2; // the actual number of neopixels
//Adafruit_NeoPixel thePixelObject(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
//supports WS2811/WS2812/WS2813
//neopixel thePixelObject(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Constructor: number of LEDs, pin number, LED type
const int pixelDelay=250; // just a variable I created to delay
const int startPixel=0; // the first pixel is 0 (zero based)
int var_PixelBrightness = 200; // the brightness value can go from 1 to 255
// thePixelObject.Color() takes RGB values from 0,0,0, to 255,255,255 - or a defined color from an included COLORS file
//int var_PixelColor = 0x008000;
// The broker's server may sever the connection if a publish event is not done prior to the default of 5 minutes.
// This variable will capture the elapsed time since last publish and
// if that elapsed time >= 2 minutes, the program will ping the server.
char strOut[1024];
int var_LastServerPing = 0;
int var_LastCurrentSensor1Read = 0;
int var_LastCurrentSensor2Read = 0;
float var_SensorMisreadValue = 16777.21;
bool onOrOff;
byte data[36];
int typeOfSensor, maxCurrent, noOfChannel, i;
//====================================================================================
//SYSTEM_THREAD(ENABLED);
const char n = 0xA4 ; // Decimal 248 = 0 xF8
const int lightpin=D7;
const int PIXELPIN = D8 ; // Pin the NeoPixels are connected to
const int PIXELCOUNT = 2; // Total number of NeoPixels
Adafruit_BME280 bme ; // this is for I2C device
String DataTime, TimeOnly ;
Adafruit_SSD1306 display (OLED_RESET);
int temp;
Adafruit_NeoPixel pixel ( PIXELCOUNT , PIXELPIN , WS2812B );
const int pressuretranspin=A0;
//pressure pins for reading fluid preesure and tem""tempertaure"
float PressureReadings;
const int temprod = D7;
bool status;
const int THERMISTORPIN =A2;
// resistance at 25 degrees C
const int THERMISTORNOMINAL = 10000;
// temp. for nominal resistance (almost always 25 C)
const int TEMPERATURENOMINAL= 25;
// how many samples to take and average, more takes longer
// but is more 'smooth'
const int NUMSAMPLES =125;
// The beta coefficient of the thermistor (usually 3000-4000)
const int BCOEFFICIENT =3950;
// the value of the 'other' resistor
const int SERIESRESISTOR =10000;
float steinhartF;
int samples[NUMSAMPLES];
SYSTEM_MODE(SEMI_AUTOMATIC);
void MQTT_connect();
bool MQTT_ping();
void setup() {
pinMode(THERMISTORPIN,INPUT);
pinMode (lightpin, OUTPUT);
pinMode(D7, OUTPUT);
timer.startTimer(5000);
Serial.begin(9600);
Wire.begin ();
pinMode ( pressuretranspin , INPUT) ;
pixel . begin () ;
pixel . show () ;
pixel.setBrightness (255);
waitFor(Serial.isConnected, 15000);
WiFi.connect();
while(WiFi.connecting())
{
Serial.printf(".");
delay(250);
}
status= bme.begin (0x76) ;
waitFor(Serial.isConnected,10000);
WiFi.on();
WiFi.connect();
while(WiFi.connecting()) {
Serial.printf(".");
}
Serial.printf("\n\n");
Particle . syncTime () ; // Sync time with Particle Cloud
Serial.begin(9600);
Wire.begin();
display.begin(SSD1306_SWITCHCAPVCC, 0X3C);
Wire.begin();
bme.begin(0x76);
// Put initialization like pinMode and begin functions here.
Serial.begin(9600);
//while(!Serial);
waitFor(Serial.isConnected, 15000);
delay(3000);
Serial.println("The CurrentMonitor program has activated the Serial port.");
pinMode(2,OUTPUT); // used for signal for neopixels
// Initiate the Wire library and join the I2C bus as a master or slave. This should normally be called only once.
// address: the 7-bit slave address (optional); if not specified, join the bus as a master.
Wire.begin();
//Connect to WiFi but not Particle Cloud
WiFi.connect();
while(WiFi.connecting())
{
Serial.printf(".");
delay(250);
}
Serial.printf("\n");
currentInit(); // call to initialize NCD board hosting current sensors
// Request 6 bytes of data
Wire.requestFrom(Addr, 6);
// Read 6 bytes of data
if (Wire.available() == 6)
{
for(i=0;i<6;i++)
{
data[i] = Wire.read();
}
}
typeOfSensor = data[0];
maxCurrent = data[1];
noOfChannel = data[2];
// Output data to Serial Monitor
Serial.printf("Type of Sensor %i \n",typeOfSensor);
Serial.printf("Max Current: %i \n", maxCurrent);
Serial.printf("No. of Channels: %i \n", noOfChannel);
delay(5000);
}
void loop(){
MQTT_connect();
MQTT_ping();
pixel.setPixelColor (2,blue);
pixel.show ();
sleepULP();
}
void sleepULP(){
SystemSleepConfiguration config;
config.mode(SystemSleepMode::ULTRA_LOW_POWER).duration(60000);
SystemSleepResult result = System.sleep(config);
delay(2000);
if(result.wakeupReason() == SystemSleepWakeupReason::BY_RTC){
Serial.printf("Awakened by RTC\n");
timer.startTimer(90000);
}
while(!timer.isTimerReady()){
PressureReadings = analogRead(pressuretranspin)/606.00-1; // read the input pin
Serial.println(PressureReadings); // debug value
display.clearDisplay();
display.display();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.printf("Pressure. %f\n",PressureReadings );
temp = bme.readTemperature () ; // deg C
display.printf("Board Temp. C^%i\n",temp );
Serial.printf("Board Temp. C^%i\n",temp );
display.printf("PSI mot temp F^%f \n",steinhartF );
Serial.printf("Current Value of Sensor One: %0.5f \n", var_SensorActualValue);
display.printf("Current. %f\n",var_SensorActualValue);
display.display();
uint8_t i;
float average;
// take N samples in a row, with a slight delay
for (i=0; i< NUMSAMPLES; i++) {
samples[i] = analogRead(THERMISTORPIN);
delay(10);
}
// average all the samples out
average = 0;
for (i=0; i< NUMSAMPLES; i++) {
average += samples[i];
}
average /= NUMSAMPLES;
Serial.print("Average analog reading ");
Serial.println(average);
// convert the value to resistance
average = 4095 / average - 1;
average = SERIESRESISTOR / average;
Serial.print("Thermistor resistance ");
Serial.println(average);
float steinhart;
steinhart = average / THERMISTORNOMINAL; // (R/Ro)
steinhart = log(steinhart); // ln(R/Ro)
steinhart /= BCOEFFICIENT; // 1/B * ln(R/Ro)
steinhart += 1.0 / (TEMPERATURENOMINAL + 273.15); // + (1/To)
steinhart = 1.0 / steinhart; // Invert
steinhart -= 273.15; // convert absolute temp to C
steinhartF = steinhart * 1.8 + 32;
Serial.print("Temperature ");
pubTemp.publish(steinhartF);
pubcurrent.publish(var_SensorActualValue);
pubBtemp.publish(PressureReadings);
pubpsi.publish(PressureReadings);
pubother.publish(temp);
pubtype.publish(typeOfSensor);
pubmax.publish(maxCurrent);
pubchannel.publish(noOfChannel);
Serial.print(steinhartF);
Serial.println(" *F");
display.printf("fluid/psi temp %f \n",steinhartF );
delay(1000);
// if ((millis()-var_LastServerPing) > 120000) // (120 seconds)
// {
// Serial.println("Pinging the MQTT server");
// // ping the server to keep the mqtt connection alive
// if(! mqtt.ping()) // if I cannot ping the server, force a disconnect
// {
// Serial.println("Forcing an MQTT disconnect");
// mqtt.disconnect(); // forcing a disconnect will force a reconnection
// Serial.println("Attempting to reestablish MQTT connection");
// }
// var_LastServerPing = millis();
// }
ReadSensorOne();
delay(1); // just enough of a delay to allow completion of other tasks
}
if((millis()-var_LastCurrentSensor1Read) > 15000); // wait 15 seconds before trying to read the sensor again
{
var_LastCurrentSensor1Read = millis();
var_SensorActualValue = getCurrent(Addr,1);
Serial.printf("Current Value of Sensor One: %0.5f \n", var_SensorActualValue);
// This next code segment is for a sensor misread - the value would be greater than 16,000
// so I set the Sensor value to 0 to stop the exhaust fan from coming on unnecessarily
if (var_SensorActualValue == var_SensorMisreadValue) // sensor reads an ON state
{
var_SensorValueToPublish = 0;
}
}
}
void MQTT_connect() {
int8_t ret;
if (mqtt.connected()) {
return;
}
Serial.print("Connecting to MQTT... ");
while ((ret = mqtt.connect()) != 0) { // connect will return 0 for connected
Serial.printf("Error Code %s\n",mqtt.connectErrorString(ret));
Serial.printf("Retrying MQTT connection in 5 seconds...\n");
mqtt.disconnect();
delay(5000); // wait 5 seconds and try again
}
Serial.printf("MQTT Connected!\n");
}
bool MQTT_ping() {
static unsigned int last;
bool pingStatus;
if ((millis()-last)>120000) {
Serial.printf("Pinging MQTT \n");
pingStatus = mqtt.ping();
if(!pingStatus) {
Serial.printf("Disconnecting \n");
mqtt.disconnect();
}
last = millis();
}
return pingStatus;
}
// Function to get Current reading from sensor
float getCurrent(int address, int i)
{
//int var_SensorIndex; // index for the arr_current array
//float arr_current[2];
// Start I2C Transmission
Wire.beginTransmission(Addr);
// Command header byte-1
Wire.write(0x92);
// Command header byte-2
Wire.write(0x6A);
// Command 1
Wire.write(0x01);
// Start Channel No.
Wire.write(i);
// End Channel No.
Wire.write(i);
// Reserved
Wire.write(0x00);
// Reserved
Wire.write(0x00);
// CheckSum
Wire.write((0x92 + 0x6A + 0x01 + i + i + 0x00 + 0x00) & 0xFF);
// Stop I2C Transmission
Wire.endTransmission();
delay(500);
// Request 3 bytes of data
Wire.requestFrom(Addr, 3);
// Read 3 bytes of data
// msb1, msb, lsb
byte msb1 = Wire.read();
byte msb = Wire.read();
byte lsb = Wire.read();
var_SensorActualValue = msb1<<16 | msb<<8 | lsb;
// Convert the data to ampere
var_SensorActualValue = var_SensorActualValue / 1000;
return var_SensorActualValue;
}
//===================================================================================
// Initialize current sensor
void currentInit()
{
// Start I2C transmission
Wire.beginTransmission(Addr);
// Command header byte-1
Wire.write(0x92);
// Command header byte-2
Wire.write(0x6A);
// Command 2 is used to read no of sensor type, Max current, No. of channel
Wire.write(0x02);
// Reserved
Wire.write(0x00);
// Reserved
Wire.write(0x00);
// Reserved
Wire.write(0x00);
// Reserved
Wire.write(0x00);
// CheckSum
Wire.write(0xFE);
// Stop I2C transmission
Wire.endTransmission();
}
void ReadSensorOne()
{
if((millis()-var_LastCurrentSensor1Read) > 15000) // wait 15 seconds before trying to read the sensor again
{
var_LastCurrentSensor1Read = millis();
var_SensorActualValue = getCurrent(Addr,1);
Serial.printf("Current Value of Sensor One: %0.5f \n", var_SensorActualValue);
// This next code segment is for a sensor misread - the value would be greater than 16,000
// so I set the Sensor value to 0 to stop the exhaust fan from coming on unnecessarily
if (var_SensorActualValue == var_SensorMisreadValue) // sensor reads an ON state
{
var_SensorValueToPublish = 0;
}
}
}
void timerTest(){
timer.startTimer(1000);
digitalWrite(lightpin, HIGH);
if (timer.isTimerReady()) {
onOrOff = TRUE;
if(onOrOff){
digitalWrite(lightpin,LOW);
delay(1000);
}
}
}





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

Comments
Please log in or sign up to comment.