


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
In this Article, we learn about how to make FIRE Fighting Robot Using Arduino.
Let’s dive
Components Require:1. Arduino Uno
2. Motor driver module (L298N)
3. DC motors and wheels
4. Infrared (IR) flame sensor
5. Servo motor
6. Relay module
7. Chassis
8. Water pump
9. Water Container
10. 9V Battery
11. Jumper wires
Basic Steps:1. Chassis Assembly· Assemble the chassis and mount the motors on it.
· Attach the wheels to the motor shafts.
2. Motor Control· Connect the DC motors to the motor driver module.
· Connect the motor driver module to the Arduino.
· Write a simple program to control the motors, allowing the robot to move forward, backward, left, and right.
3. Flame Detection· Connect the flame sensor to the Arduino.
· Write a program to read data from the flame sensor.
· Implement logic to detect the presence of a flame
4. Water Pump Setup· Connect the water pump to the Arduino and power source.
· Integrate a switch to control the water pump.
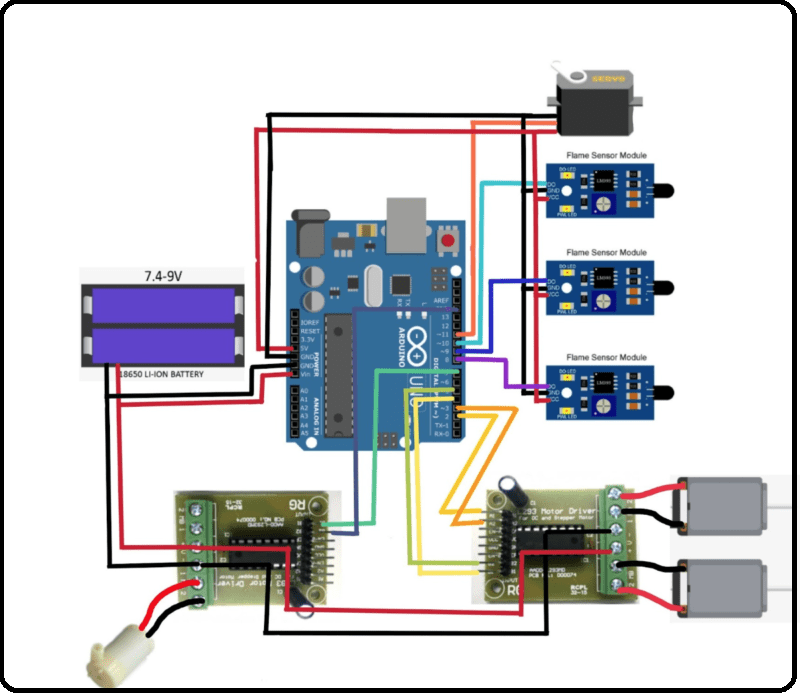
CircuitDiagram:
Fire fighting robot using Arduino works by integrating sensors to detect fire, making decisions based on the sensor data, controlling the movement of the robot, and activating mechanisms to suppress the fire, all managed by an Arduino microcontroller.
· Rescue Operations
· Wildfire Prevention
· Remote or Inaccessible Locations
· Event Security
· Automated Fire Response in Buildings









_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments
Please log in or sign up to comment.