



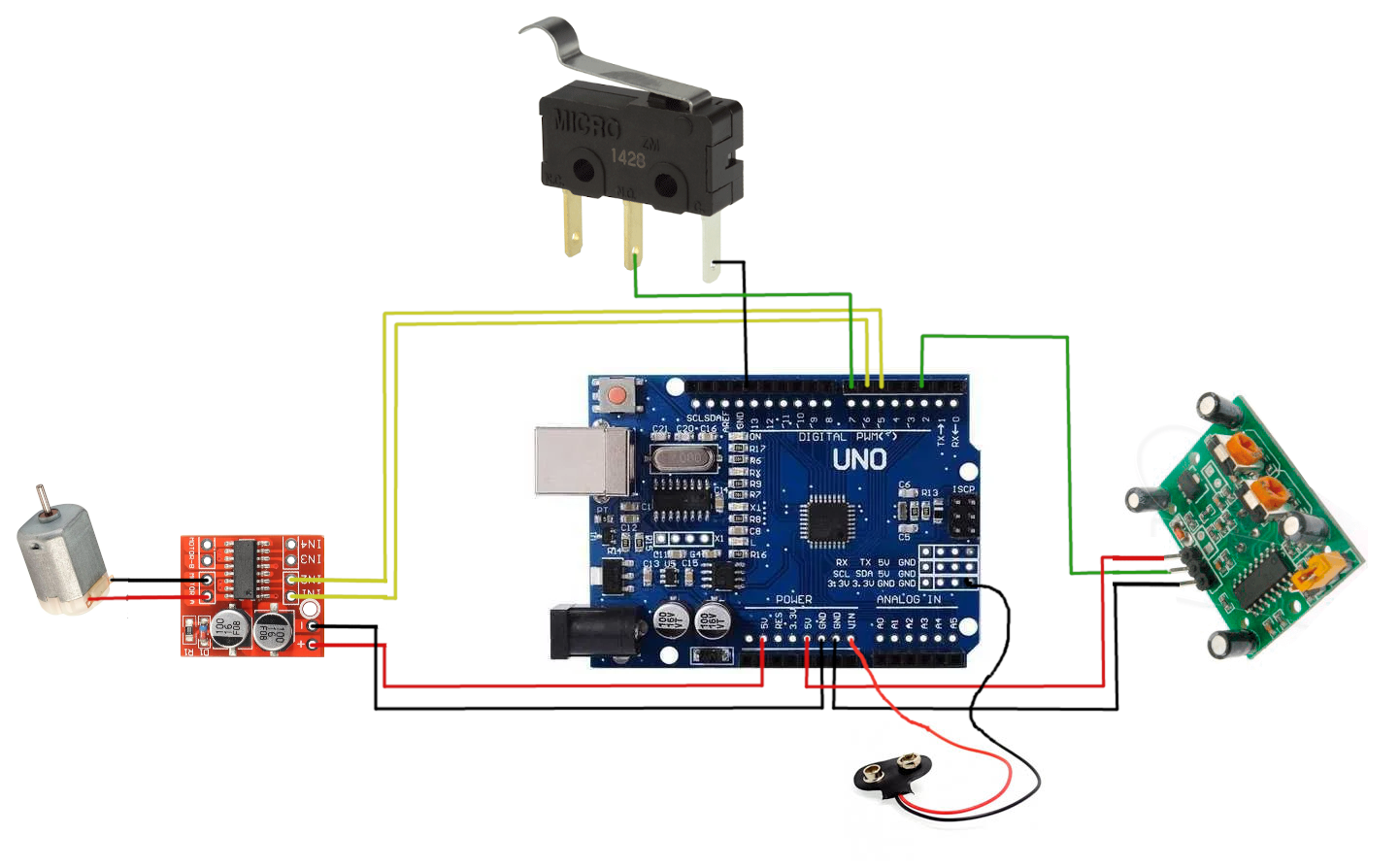
The project uses an Arduino UNO to sense our victim with a PIR sensor. Once they have been detected a small DC motor with a spool of cotton unwinds to deploy our spider. A microswitch keeps a check on our spider to make sure it doesn't get too carried away.
The project has STLs if you have access to a 3D printer or templates for cutting out on wood or a laser template for laser cutting.
If you are new to Arduino this is the perfect project to build something and see a practical outcome.
All the code is included and the parts should be readily available throughout the world.
See it in action below here
Full Build guide



{kind=link}
Comments
Please log in or sign up to comment.