#include<Keypad.h> // KEYPAD LIBRARY FOR KEYPAD INTERFACING
#include<LiquidCrystal.h> // LIBRARY FOR LCD INTERFACING
#include<Servo.h>// LIBRARY FOR SERVO MOTOR
//#include<String.h>
#define buzzer 20 // DEFINING PIN FOR BUZZER.
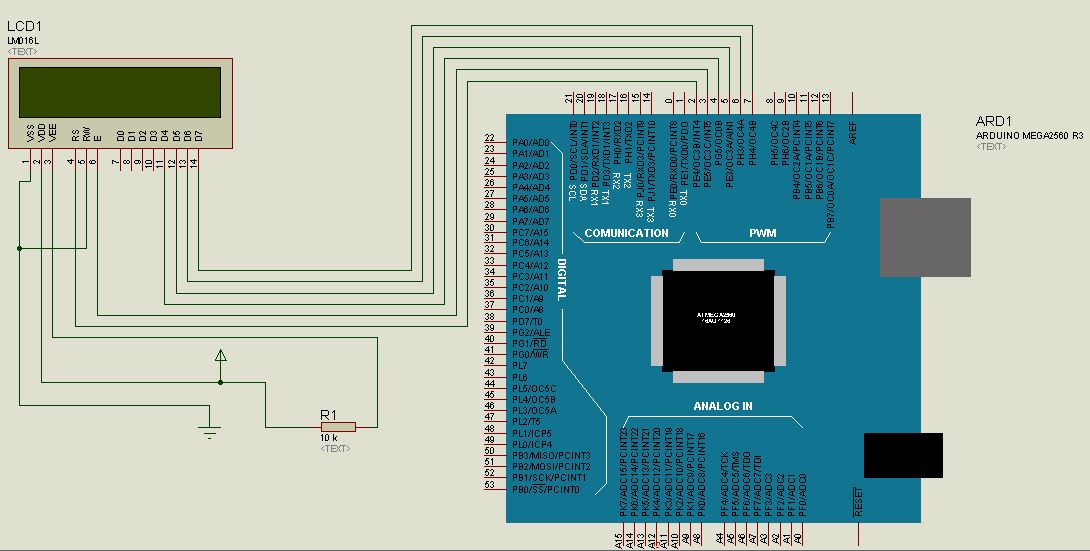
LiquidCrystal lcd(14,15,16,17,18,19); // PINS FOR LCD
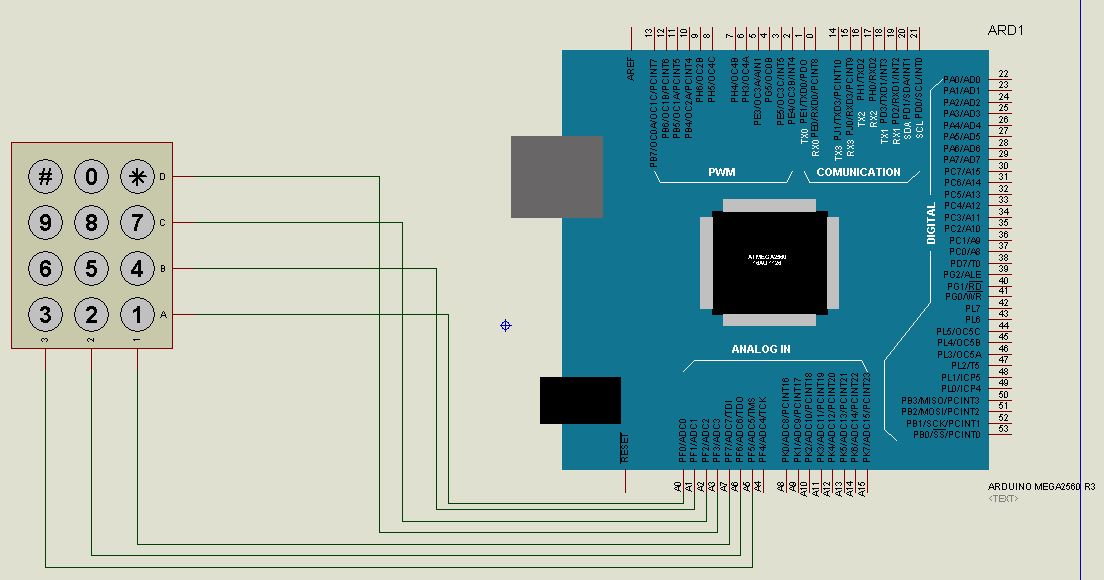
char keys[4][4]={ // LAYOUT OF KEYPAD
{'1','2','3','A'},
{'4','5','6', 'B'},
{'7','8','9', 'C'},
{'*','0','#', 'D'}};
byte rowPin[4]={4,5,6,7}; // ROW PINS OF KEYPAD
byte colPin[4]={8,9,10,11}; // COLUMN PINS OF KEYPAD
Servo servo_Motor;
String password = "159"; // SETTING DEFAULT PASSWORD.
int position = 0; // VARIABLE FOR DETERMINING THE POSITION.
int wrong = 0; // VARIABLE FOR CALCULATING THE WRONG INPUT.
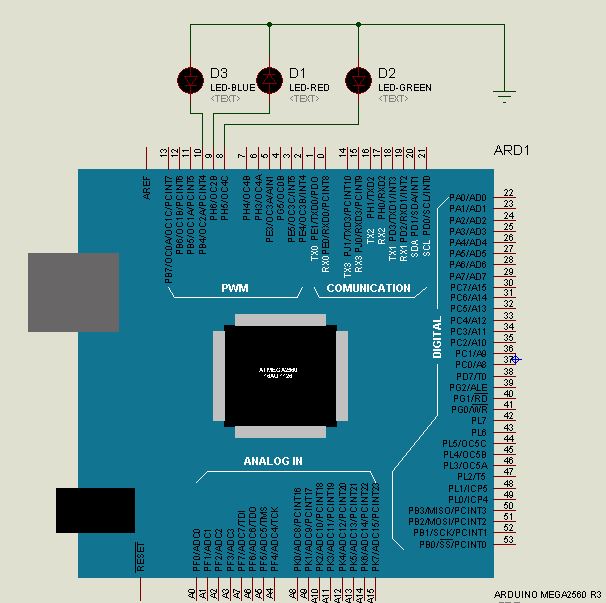
int redPin = 9; // DEFINING PIN FOR RED LED
int greenPin = 8; // DEFINING PIN FOR GREEN LED
Keypad keypad=Keypad(makeKeymap(keys),rowPin,colPin,4,4);
// MAPPING THE KEYPAD.
int total = 0; // VARIABLE TO DETERMINE THE NUMBER OF WRONG ATTEMPTS.
void setup()
{
pinMode(redPin,OUTPUT);
pinMode(greenPin,OUTPUT);
lcd.begin(16,2);
lcd.print("DOOR LOCK SYSTEM");
lcd.setCursor(0,2);
lcd.print(" BY:");
delay(2000);
lcd.clear();
lcd.print("Creative");
lcd.setCursor(0,2);
lcd.print(" Engineer");
delay(2000);
lcd.clear();
servo_Motor.attach(3);
setLocked(true);
delay(1000);
pinMode(buzzer, OUTPUT);
}
void loop()
{
lcd.clear();
lcd.print("Enter Password:");
delay(100);
char pressed=keypad.getKey();// TAKING THE INPUT FROM KEYPAD
String key[3];
if(pressed) // IF THE KEY IS PRESSED
{
lcd.clear();
lcd.print("Enter Password:");
lcd.setCursor(position,2);
lcd.print(pressed);
delay(500);
if(pressed == '*' || pressed == '#')
{
position = 0;
setLocked(true);
lcd.clear();
}
else if(pressed == password[position])
{
key[position]=pressed;
position++;
}
else if (pressed != password[position] )
{// IN CASE OF WRONG INPUT INCREMENT BOTH WRONG AND POSITION.
wrong++;
position ++;
}
if(position == 3)
{// WHEN POSITION == 3 THEN CHECK THE FOLLOWING
if( wrong >0) // IF ANY WRONG INPUT IF GIVEN THEN INCREMENT TOTAL AND
// SET WRONG AND POSITION TO ZERO.
{
total++;
wrong = 0;
position = 0;
lcd.clear();
lcd.print("WRONG");
lcd.setCursor(5,2);
lcd.print("PASSWORD");
delay(1000);
setLocked(true);
}
else if(position == 3 && wrong == 0)
{// IF NO WRONG VALUE IS GIVEN THEN DISPLAY THE ACCEPTED PASSWORD AND
// MOVE THE SERVO MOTOR.
position = 0;
wrong = 0;
lcd.clear();
lcd.print("PASSWORD");
lcd.setCursor(6,2);
lcd.print("ACCEPTED");
delay(2000);
lcd.clear();
lcd.print("Door Open");
delay(2000);
setLocked(false);
}
if(total ==3)// IF TOTAL OF 3 ATTEMPTS ARE DONE BY ENTERING WRONG PASS
//WORD THEN SOUND A BUZZER AND SET TOTAL TO 0.
{
total=0;
buzzer_beep();
delay(500);
}
}
}
}
void setLocked(int locked)// FUNCTION TO CHANGE STATUS OF SERVO MOTOR.
{
if (locked)
{
digitalWrite(redPin, HIGH);
digitalWrite(greenPin, LOW);
delay(1000);
servo_Motor.attach(3);
servo_Motor.write(10);
delay(1000);
servo_Motor.detach();
}
else
{
digitalWrite(redPin, LOW);
digitalWrite(greenPin, HIGH);
delay(1000);
servo_Motor.attach(3);
servo_Motor.write(90);
delay(1000);
servo_Motor.detach();
}
}
void buzzer_beep()// FUNCTION TO BEEP THE BUZZER.
{
digitalWrite(buzzer,HIGH);
delay(1000);
digitalWrite(buzzer,LOW);
delay(1000);
lcd.clear();
lcd.setCursor(16,0);
lcd.print("Subscribe Channel");
lcd.setCursor(16,1);
lcd.print("For More Videos");
delay(2000);
while(1)
{
lcd.scrollDisplayLeft();
delay(200);
}
}
//IF VIDEO WAS HELPFUL THE DO LIKE COMMENT AND SUBSCRIBE THE CHANNEL. ALSO SHARE THE
//VIDEO SO THAT OTHERS CAN ALSO LEARN NEW THINGS.




_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.