



Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
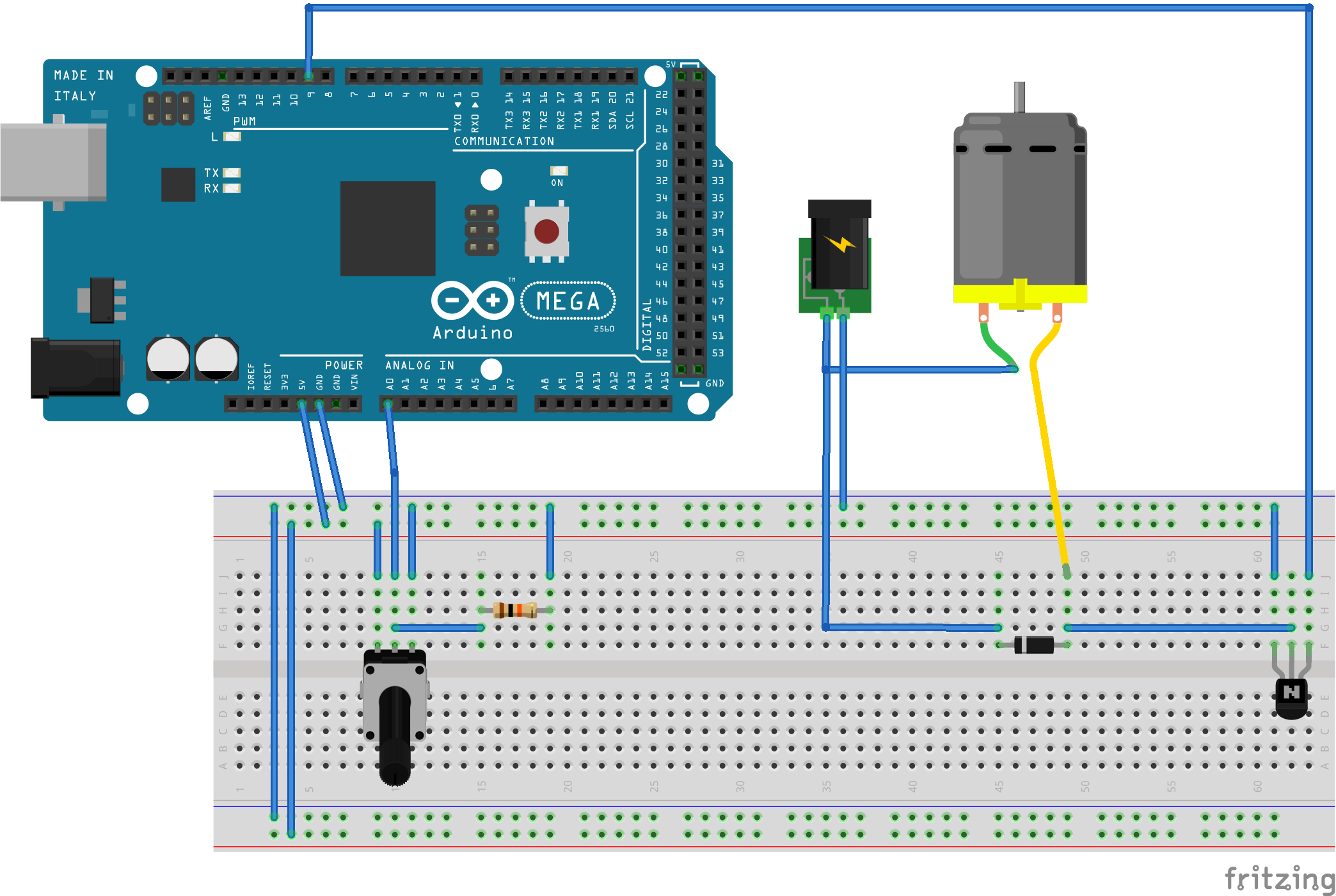
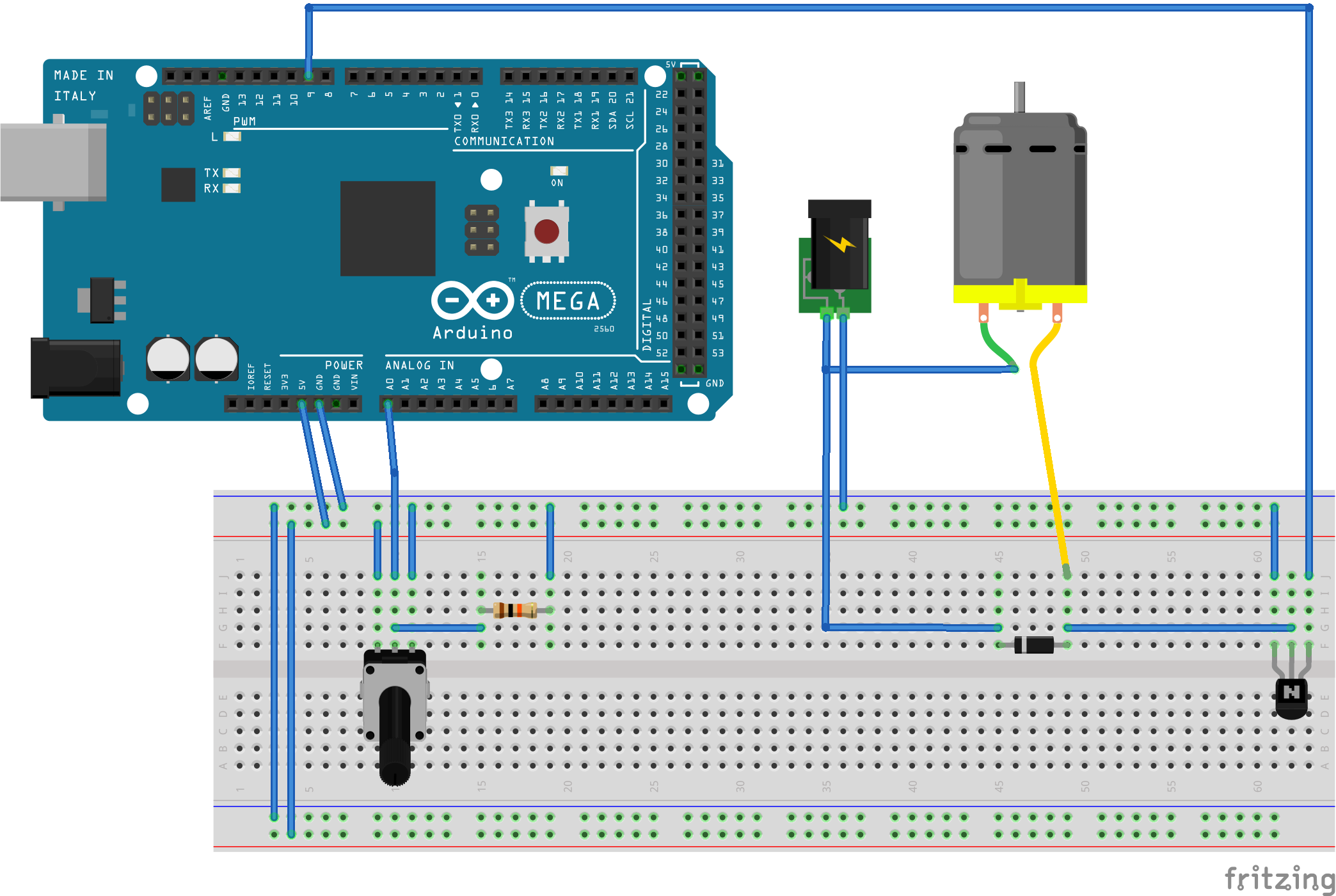
I bought my first magnetic stirrer to help improve my mushroom liquid cultures. After seeing how much the constant stirring improved the culture, I decided I wanted more of them. After reading a few articles about the magnetic stirrers, I found that I could use an Arduino as the control signal (PWM) to drive PC fans and make a batch of magnetic stirrers for about the same price as one entry level stirrer.






{kind=link}
Comments
Please log in or sign up to comment.