



Hardware components | ||||||
 |
| × | 1 | |||
VisionSense: Advanced Ultrasonic Blind Stick with GPS Tracking for Enhanced Mobility and Safety
1.INTRODUCTION
The "Ultrasonic Blind Stick with GPS Tracking" is a technologically advanced aid designed to assist visually impaired individuals in navigating their environment. This stick employs ultrasonic sensors, GPS, and other advanced features to provide a comprehensive solution that enhances safety and independence for users.
1.1 MOTIVATION
Traditional blind sticks only detect obstacles upon physical contact. This limitation inspired the development of an advanced system capable of detecting obstacles before contact, sensing water, and providing GPS tracking for the user's safety.
1.2 OBJECTIVES
- To enhance obstacle detection and user safety.
- To incorporate water detection, light sensing, and GPS tracking.
- To provide a reliable means for locating lost users or sticks.
1.3 BACKGROUND
Conventional mobility aids for the visually impaired are limited in their functionality. This project aims to bridge that gap by integrating modern sensor technology and GPS systems, offering users more autonomy and security.
2. DESIGN METHOD
The design method of the "Ultrasonic Blind Stick with GPS Tracking" involves integrating hardware and software components to create a functional system. The microcontroller (ATmega328P) serves as the core, processing input from sensors such as ultrasonic sensors for obstacle detection and water sensors for wet surfaces. GPS and GSM modules are incorporated for location tracking and emergency communication. The software, developed using C and Keil Compiler, manages sensor data, controls outputs like buzzers and LCDs, and ensures seamless interaction between all components.
3. SOLUTION DESIGN
3.1 HARDWARE
- Microcontroller: ATmega328P AVR MC
- Sensors:
- LDR Sensor 5MM Photoresistor
- Water Sensor Module
- Power: 9v Battery
- Communication:
- SIM 800 GSM Module
- Neo6mv2 GPS Module
- Output: Buzzer, LCDs
- Miscellaneous Components:
- Resistors, Capacitors, Transistors, Cables & Connectors, Diodes, PCB, LEDs, Transformer/Adapter, Push Button
3.2 SOFTWARE
Software Specifications:
- Compiler: Keil Compiler
- Programming Language: C
- Development Kits:
- Blues' kit (Swan v3, Notecarrier AL or AA, Notecard Cellular NBGL, Notecard WiFi v1)
- Nordic Semiconductor's nRF52840 DK
- XIAO ESP32S3 Sense + Grove Shield for Xiao
3.3 ARCHITECTURE
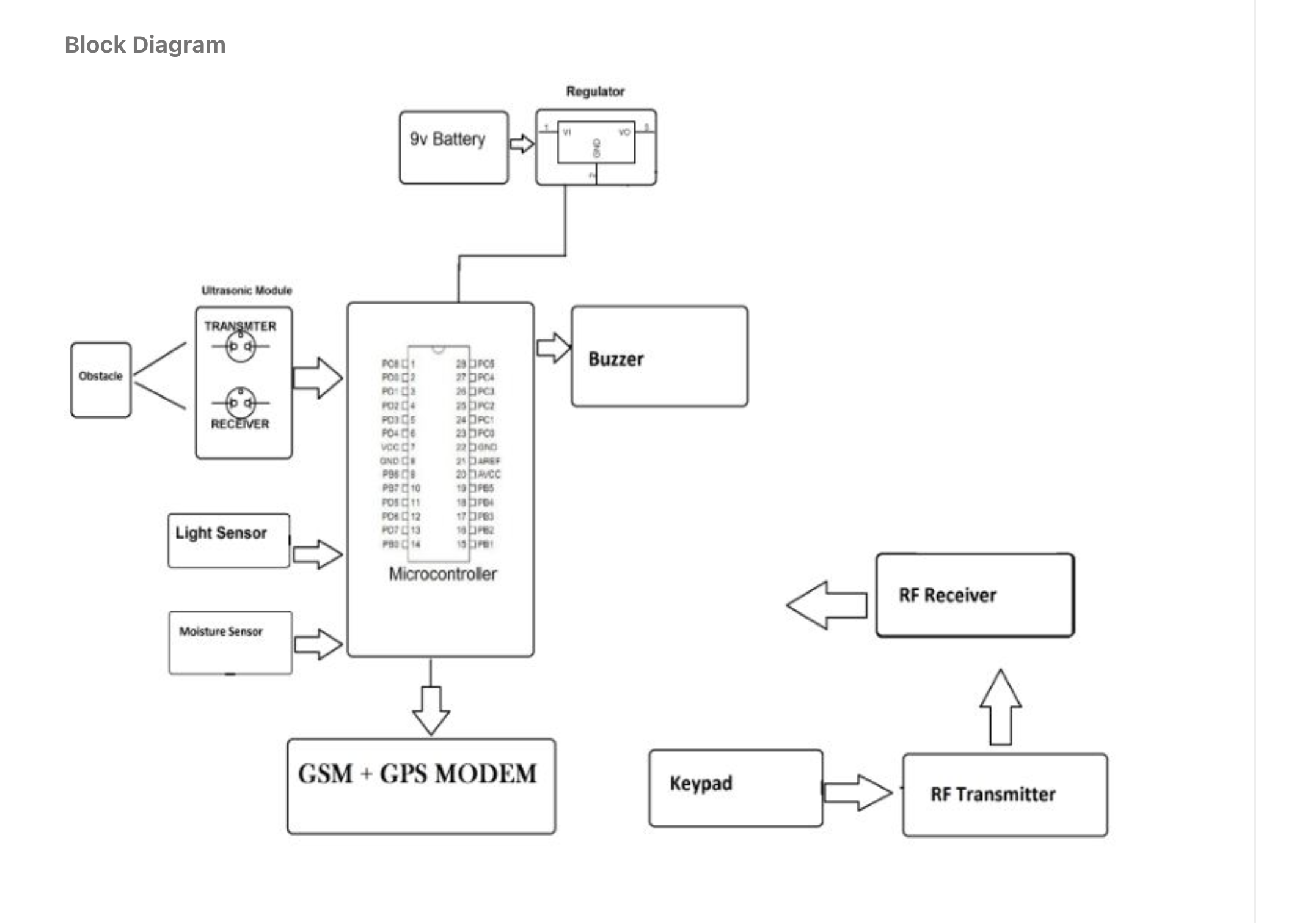
The architecture of the "Ultrasonic Blind Stick with GPS Tracking" is designed around a microcontroller, the ATmega328P, which serves as the central processing unit. It connects various sensors and modules:
- Ultrasonic Sensor: Detects obstacles and measures the distance to them. Data is processed to generate beeps to warn the user.
- Water Sensor: Positioned at the base, it detects water and signals the user with a different beep pattern.
- LDR Sensor: Detects ambient light levels, informing the user if they enter a dark space.
- GPS Module (Neo6mv2): Tracks the location of the user, sending coordinates via the SIM 800 GSM Module.
- GSM Module (SIM 800): Sends emergency SMS alerts with GPS data.
- Buzzer and LCDs: Provide audible and visual feedback to the user.
- Power Supply: A 9V battery powers the entire system, supported by capacitors, resistors, and other circuit components to ensure stable operation.
3.4 IMPLEMENTATION
Implementation involves programming the microcontroller using C to manage sensor data, control outputs, and coordinate communication modules. The ultrasonic sensor, water sensor, and LDR are calibrated to detect their respective elements effectively. The GSM and GPS modules are configured to work together, enabling real-time location tracking and communication. The system’s firmware is developed using Keil Compiler, ensuring efficient and reliable operation. The entire system is assembled onto a PCB, with all connections secured and tested.
4. EVALUATION
The system was evaluated on key performance metrics like obstacle detection accuracy, response time, and GPS tracking reliability. Tests showed that the ultrasonic sensor accurately detected obstacles within the specified range, and the water sensor promptly alerted users to wet surfaces. The GPS module provided accurate location data, and the GSM module successfully transmitted SMS alerts. User feedback highlighted the system's utility in real-world scenarios, though areas such as battery life and robustness in extreme conditions were noted for potential improvement.
4.1 THEORETICAL AND PRACTICAL CONTRIBUTION
Theoretical Contribution: The project advances the field of assistive technology by integrating multiple sensors and GPS into a single, user-friendly device. It demonstrates how microcontrollers can manage complex systems, combining environmental sensing with real-time location tracking. This contributes to the broader understanding of how embedded systems can enhance accessibility and safety for visually impaired individuals.
Practical Contribution: Practically, the project offers a functional tool that significantly improves the mobility and safety of visually impaired users. It provides immediate, real-world benefits, including obstacle detection before contact, water sensing, light detection, and emergency communication. The system’s integration of GPS tracking and remote alert features addresses critical needs for independence and security, making it a valuable aid in daily life. Additionally, the project sets a foundation for further innovations in smart assistive devices, encouraging the development of more sophisticated and accessible technologies.
6.Conclusion
The "Ultrasonic Blind Stick with GPS Tracking" represents a significant advancement in assistive technology, offering enhanced mobility, safety, and independence for visually impaired individuals. By integrating ultrasonic sensors for obstacle detection, water sensing, light detection, and GPS tracking, this system addresses critical challenges faced by users in navigating their environment. The inclusion of emergency SMS alerts and a remote locating feature further enhances its practicality. Overall, this project provides a robust, real-world solution that combines theoretical insights with practical applications, paving the way for future innovations in smart assistive devices.
VisionSense block diagram

{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.