


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
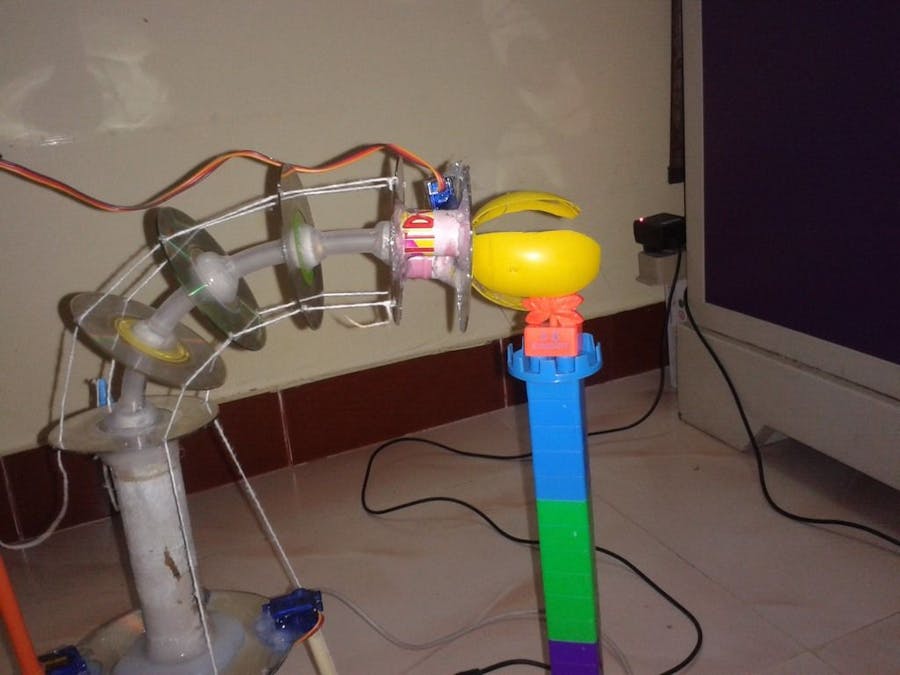
Trunk Robotic arm is a art in modern robotics. It can able to spin and work like artistic. All robotics inspired are inspired by living things, in this order Trunk robotics inspired by elephant and snake. Here i try to make it using materials around us.
I control it using Sensor in the mobile through blue tooth and the Robotic arm is activated using 4 servos connected with strings. Gripper also control using string and a servo.
Step 1: Materials Required1) Normal size Old CD/DVD - 2 Nos.
2) Small size Old CD - 5 Nos.
3) Hull hot glue gun stick.
4) 1 feet length 1.5" PVC pipe.
5) Sketch pen - 4 Nos.
6) Micro Servo - 5 Nos.
7) String.
8) Arduino Uno.
9) 12V,5V,.3.3 V Power supply board.
10) Blue tooth module HC-05.
11) Double Side Tape.
12) Small ball.
Tools Required1) Drilling Machine with mm drill bit.
2) Hot glue gun.
3) Hack Saw.
4) Soldering ion.
5) Plain PCB.
6) Male and Female Header Pins.
Step 2: Make Trunk ArmFirst step is to make Trunk Robotic arm
1) Take five Small size Cd and mark 4 dots in corner with equal distance.
2) Drill small hole using hand drilling machine.
3) Take a full hot glue gun stick.
4) Insert the the hot glue gun stick in to the small CD Center hole.
5) The CD hole is big than the hot glue gun stick.
6) So i stick a double side tape around the stick and fix the CD.
7) Now the CD hold tightly.
8) Now use the hot glue gun paste the CD, Double side tape and the hot glue gun stick together.
9) Now the CD hold the hot glue gun stick tightly.
10) Divide the Hot glue gun stick in to 5 equal parts and mark it using marker.
11) Paste the Double side sticker in each mark and fix a cd like before.
Note.- while fixing the other four cds keep all the four hold we drilled in straight line.
12) Now the Basic of the trunk arm is finished.
Step 3: Make Arm Holder1) In the arm holder we want to fix the servos so we want to thicken it.
2) So take two normal CD/ DVD and stick it together using hot glue gun.
3) Cut the 1.5" PVC Pipe in to two pieces using Hack saw.
4) Fix the two pieces in the both side center of the CD we already glued together.
5) Now The holder is ready.
6) Hot Glue the Trunk arm in one side of the pipe.
Note:-
use hot glue in large. So all are fix very tight and stable while servo is working
Step 4: Manual Trunk arm1 ) Now check the trunk arm manual using hands
2) Tie a string in one of the four holes in the top small cd.
3) Pass the string through remaining four cds hole straight to the hole in the Top CD.
4) Now hold the holder in one hand.
5) Pull the string and found the arm bend in that direction.
6) Release the string the arm stand straight.
Step 5: Fix servos1) Servo horn are very small so while test i found it pull the arm for very small distance.
2) So when search around i found color sketches they are hard and weight less.
3) So i Hot glue sketches on the horn of the micro servo.
4) Now it able to pull the arm up to the top one come to 90 degree.
5) Like wise glue all the four sketch with servos horn.
6) Now take the trunk arm holder and trunk.
7) Glue the Servo in the normal cd in the holder.
8) Note that the Servo horn sketch is in straight line with the hole in the trunk cds.
9) Also Glue the Servo in the way where it rotate 180 degree from parallel to the holder to the opposite position.
10) Verify the image for details.
Step 6: Connect Strings1) Now its time to connect the Strings.
2) Take Long string and Cut it in to four pieces.
3) Tie each string in to the holed of the top cd in the trunk arm.
4) Pass it trough the other cds hole straight to it.
5) keep all the servos in 90 degree.
6) Tie the Other end of four strings in to the Color sketch edge.
7) Make the string tight with the CD st servo in 90 Degree.
Now all are ok.
Step 7: Make a Servo Shield1) Make a Shield for 6 servos by own.
2) Take a plain PCB and solder a male header like the way it fix with Arduino uno.
3) In the Plain PCB, Solder 6 (3 pins)Male headers for 6 servos.
4) connect all the Positive and Gnd pins together.
5) And connect the Gnd pin to the Arduino GND. Then take Positive and Gnd wire for seperate supplu.
6) In arduino uno Pins 3, 5, 6, 9, 10, 11 are PWM pins.
7) So Solder each pin to each servo pins.
8) Now the Shield is ready.
Step 8: Step By step Testing1) First a single servo is connected to the Arm and tested. In the test it is found the servo horn length is not enough.
2) In the second test servo horn is extended and tested and found ok. Both the videos are show here.
Step 9: Final Testing1) Finally after all the servos are fitted and strings are connected.
2) Make a program in such a way which make the Trunk arm rotate in all the direction
3) The test is success.
4) Now we want to connect it to the mobile.
Step 10: Make Blue tooth connection1) Connect HC05 blue tooth module to the software serial of the Arduino board in pins 2,4.
2) Mobile orientation sensor data received through blue tooth and the arm works according to the mobile orientation.
See the coding attached with the file
Step 11: Use sensoduino1) Download free software sensoduino in your android mobile.
2) Connect the blue tooth and pair with HC05 listed.
3) Then mark the on and Tx of Orientation sensor.
4) Now tilt the mobile to move the trunk arm.
Step 12: Testing the mobile control1) Before testing hot glue the whole arrangement over a board to allow it stand straight.
2) As per early slide power up the arduino and servo.
3) Open sensoduino and connect HC05.
4) Then control the Trunk Arm. See the Video for details.
Step 13: Make a gripper1) Now arm is ready to transfer object make a gripper.
2) I use a small ball to make gripper.
3) cut the ball 80% in to equal 3 parts.
4) Then trim the flower like portion in the ball.
5) Hot glue a hard rod to avoid bend of the ball.
6) Hot glue the whole arrangement in a small cd.
7) Fix a rubber band back side to reverse the gripper.
8) Add separate strings to each gripper and bring it to the center and tie.
9) Add a servo motor in the back side and tie the string.
Step 14: Gripper Testing1) Check the gripper separately to see how it work.
Step 15: Finish the project1) Now fix the gripper in the top of the trunk arm using hot glue.
2) From gripper servo to arduino leave a long wire to allow the trunk to bend.
Step 16: Check the robotic function1) The fun begins.
2) Now the Trunk arm pick up the object from one end and rotate to the other end and put the object in the basket. Program is attached with this.
3) With this setup we can do lot of programs and check how it works.
Please watch all the videos and Comment. Your appreciation make me feel very very happy.




Comments
Please log in or sign up to comment.