



Hardware components | ||||||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
Hello everybody, I am Jesús Soriano, student of electronic engineering, entrepreneur... and cyclist!
I have been riding my bike since I was 12, and I usually train alone. During these trainings, I have had lots of falls, accidents and other mishaps. One day, I realised that, if I had a hard accident and I lost consciousness, I could die. I was alone in the mountains!
It is easier to understand what I mean with a little video. Imagine: You are riding your bike, enjoying the landscape and suddenly, a car appears and runs over you. You fall down a slope, and the driver runs away. You stay unconscious, trapped, invisible to the world.
Two or three hours later, your family will start to worry. The emergency services will try to locate you, and they will after 4-5 hours. You will be probably dead.
So I started doing research, and I saw many interesting options: First, an app, Strava Summit. In case of accident, it could send the gps position to friends. Angi, from Specialized, was also an option. The system was integrated on the helmet, and in case of colision, it could ask for help. But it was a problem. All of these systems needed a mobile phone signal to work. Battery, gps and mobile phone signal were necessary.
That is how Never Ride Alone, NRA, came into being. I found Sigfox as my solution for data sending in the mountains, and when I discovered that they had an arduino with sigfox module... It was awesome!
I decided that NRA was going to work like an inverted alarm. When you go cycling, you activate NRA by pressing a button. Leds start blinking, while they improve visibility too. If NRA detects no motion in 30 seconds, it activates emergency mode. It starts buzzing, and if nobody stops it (maybe you are not in danger, but you forgot to turn it off) is that you are injured. Automatically, the gps module starts working in NRA, and it sends gps location through the SigFox network to all of your friends/family.
I asked lots of cyclists, and I came up with a minimalist design. Cyclists want a gadget that is easy to use, and with a good battery. With NRA, you only have to press the button and pedal. After training, you only have to stop it and charge it.
The case of NRA was made of ABS plastic. I used a 3D printer, provided by The Polythecnic University of Valencia.
You can edit/download NRA design files here:
https://www.tinkercad.com/things/fmkE685dNfP-nra-v01
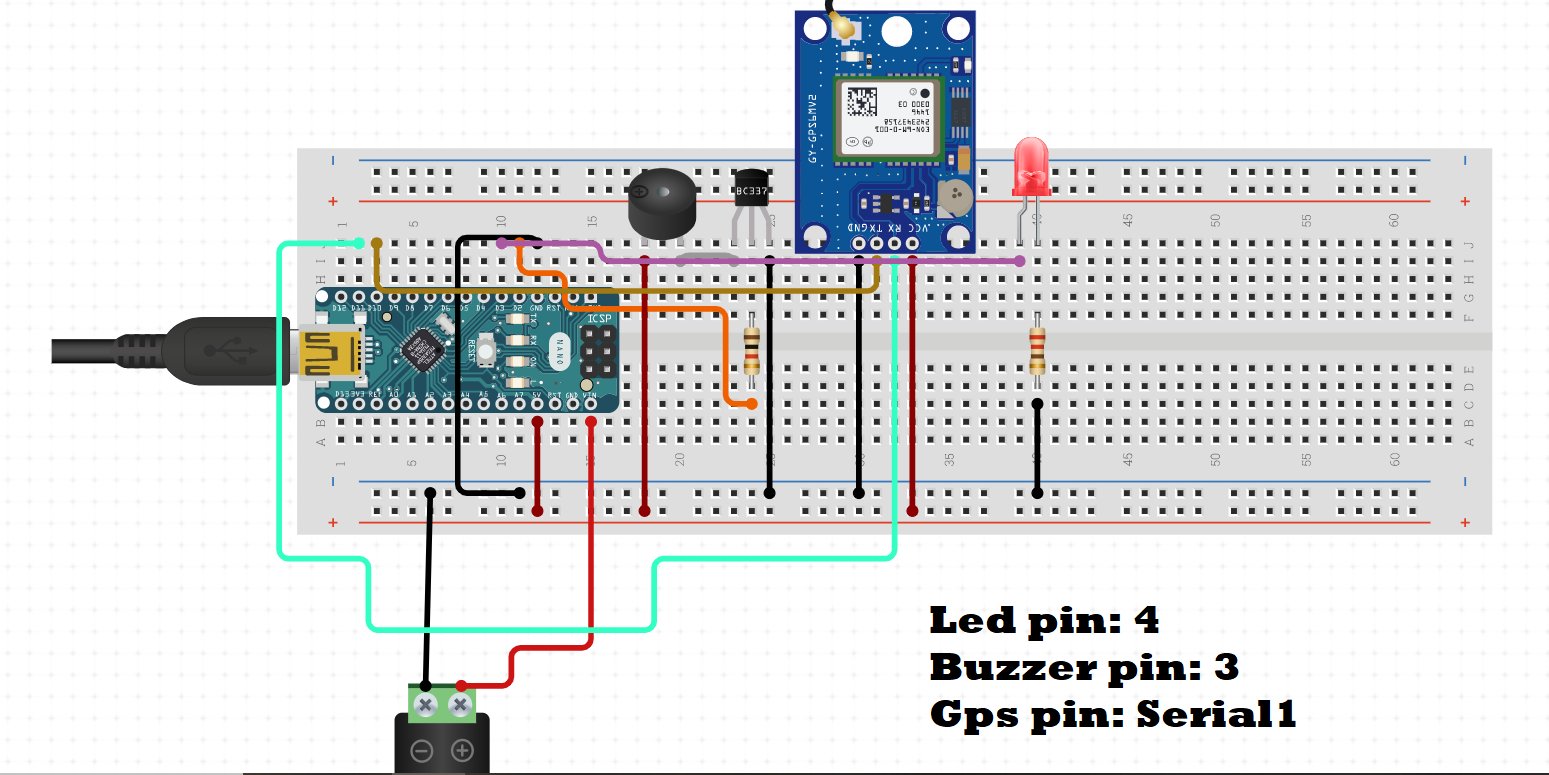
For this build, I am using an Arduino MKR1200, a Neo 6-m GPS, a button, 2 leds, one 1k Ohm resistor, a buzzer, a vibration sensor and a 3.7v 150mah battery.
After that, I started with Arduino and SigFox configuration. This is my configuration on the SigFox Backend Page:
When the Arduino MKR1200 sends data, this server converts the raw dat givens into information. In my case, I use the longitude, latitude and altitude. With this information, I send an e-mail to all the people in my settings (friends, family...) so they can click on the google maps link, and know where the injured biker is.
This is how all the components are fitted in the case:
First of all, the GPS module. We only need positive, negative, and the data transfer wire. The antenna goes glued on the frame. The arduino will go over it.
We also add the battery, connected to the arduino, and also a switch. This way, we can turn it on/off.
We have the battery connector, so we can charge NRA. It should be off.
During this project I have used a drone battery charger for charging NRA. It worked perfectly.
After making the wiring, we put the antenna over the arduino. It is a little bit complicated to join all the components in this shell, but with attention it can be done.
In this build, we didn´t use the vibration sensor. In this case, when NRA is powered, it starts sending GPS position every 10 minutes. The results where good.
We also tested NRA along the roads. It was a very good experience.
It is really easy to use, and it gives you the feeling you have a good gadget on your hands.
So this is Never Ride Alone history, a gadget that is aware always of you. Whenever you ride, you know you are safe, because in case of accident, you will be always located.
From Never Ride Alone team we have also tried to improve our planet. During all of these ride tests, we also have picked up all trash we have seen around the mountains. According to the Sustainable Development Goals, we tried to remove all the bin we saw during the rides.
After picking up all of this, we realized that most of the trash in the mountains comes from cyclists! We have picked up lots of energetic bars plastics, gels and tires. Now, we are trying to raise awareness among all cyclists. During races, we have created clean points, where people can throw all their rubbish without stopping and losing time. This area is bounded and, when the race finishes, it is all cleaned.
Thanks for reading, and ride safe :)


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.