


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
1.1 INTRODUCTION
Playing in the wide outdoors brings happiness, independence, and a sense of oneness with the natural world. But finding campsites, negotiating uneven terrain, and dodging hazards can be very difficult for those who are blind or visually challenged. Conventional equipment frequently falls short of offering the all-encompassing assistance required for an autonomous and safe outdoor experience. Seeing this need, we created "TrailBlaze," a ground-breaking navigation and communication system that enables travelers with vision impairments to confidently explore outdoor settings.
The wearable device "TrailBlaze" integrates cutting-edge GPS technology, customisable communication features, and obstacle detection into one easy-to-use package. This creative approach guarantees a smooth and enriching experience in nature by guiding users through intricate outdoor landscapes and facilitating efficient communication with their surroundings. Through the prioritization of affordability, accessibility, and ease of use, "TrailBlaze" creates new opportunities for visually impaired people to enjoy the outdoor environment in a safe and autonomous manner.
1.2 MOTIVATION
While there is a universal urge to explore and engage with nature, outdoor excursions can present substantial challenges for those who are sight impaired. Many people with visual impairments feel excluded from the joys of nature and outdoor activities because traditional navigation tools and assistive gadgets often fail to address the unique problems they confront.
My inspiration for "TrailBlaze" comes from a deep dedication to empowerment and inclusivity. We think that everyone should be able to enjoy the freedom and beauty of the outdoors, regardless of their level of physical ability. "TrailBlaze" uses cutting-edge technology and user-centered design to create a connection between the natural environment and visually impaired people.
My motivation stems from the idea of a world free from physical restraints, where adventure and discovery are the norm. The goal of "TrailBlaze" is to give users a sense of confidence and freedom in addition to direction and safety. My mission is to make it easy for travelers who are blind or visually challenged to navigate, communicate, and interact completely with their environment. It is our goal to encourage a new generation of explorers to appreciate the outdoors and discover its beauties by making outdoor experiences more pleasurable and accessible.
1.3 OBJECTIVES
"TrailBlaze" aims to improve navigation independence by offering audio-guided, real-time navigation for secure, self-directed exploration. With the help of built-in sensors that warn users of possible dangers and provide voice commands and configurable audio phrases, the system seeks to enhance obstacle detection. In order to guarantee accessible camping options, it will provide comprehensive campsite information and reservation support. With a DIY assembly cost of about $100, the solution is affordable and designed to work with both Braille displays and smart canes. It will also conduct extensive field testing with visually challenged people, create a helpful online community for feedback and cooperation, provide offline capabilities for remote locations, and incorporate an emergency alert feature with GPS location sharing for extra safety.
1.4 BACKGROUND
"TrailBlaze" aims to improve navigation independence by offering audio-guided, real-time navigation for secure, self-directed exploration. With the help of built-in sensors that warn users of possible dangers and provide voice commands and configurable audio phrases, the system seeks to enhance obstacle detection. In order to guarantee accessible camping options, it will provide comprehensive campsite information and reservation support. With a DIY assembly cost of about $100, the solution is affordable and designed to work with both Braille displays and smart canes. It will also conduct extensive field testing with visually challenged people, create a helpful online community for feedback and cooperation, provide offline capabilities for remote locations, and incorporate an emergency alert feature with GPS location sharing for extra safety. These technologies can be integrated into a single, easily navigable system to provide a comprehensive solution that allows visually impaired people to safely and independently explore and interact with the natural world.
"TrailBlaze" is a wearable technology that promises to solve these problems by delivering real-time navigational direction, obstacle detection, and efficient communication. This initiative, which aims to increase outdoor adventure accessibility and give visually impaired people a greater sense of freedom and confidence, was designed with affordability and convenience of use in mind. The intention of this project is to guarantee that everyone, regardless of physical constraints, may enjoy the outdoors.
2. DESIGN METHOD
The "TrailBlaze" design process adheres to a methodical approach to guarantee the creation of a useful, intuitive, and efficient solution for people with visual impairments. The technique creates a complete outdoor navigation and communication solution by fusing technological innovation with the ideas of user-centered design. Among the design method's crucial steps are:
The design method for "TrailBlaze" follows a structured approach to ensure the development of a functional, user-friendly, and effective system for visually impaired individuals. The method integrates user-centered design principles with technical innovation to create a comprehensive outdoor navigation and communication solution. The key steps in the design method include:
- Needs Assessment and Research:
- User Research: Conduct in-depth interviews and surveys with visually impaired individuals to understand their specific needs, challenges, and preferences regarding outdoor navigation and communication.
- Market Analysis: Review existing technologies and solutions to identify gaps and opportunities for improvement.
- Concept Development:
- Feature Definition: Based on research insights, define the core features of the "TrailBlaze" system, including real-time navigation, obstacle detection, customizable communication, and offline functionality.
- Design Specifications: Create detailed specifications for each feature, outlining the technical requirements and user interface considerations.
- Prototype Design:
- Hardware Selection: Choose suitable components for the wearable device, including GPS modules, proximity sensors, microcontrollers, and audio output systems.
- Software Development: Develop the mobile app and embedded software for the wearable device, focusing on navigation algorithms, obstacle detection, and communication functionalities.
- Initial Prototyping: Build a functional prototype of the wearable device and mobile app to test core features and gather initial user feedback.
- User Testing and Iteration:
- Field Testing: Conduct testing with visually impaired users in various outdoor settings to evaluate the effectiveness of navigation guidance, obstacle detection, and communication features.
- Feedback Collection: Gather feedback from users to identify areas for improvement, including usability, accuracy, and comfort.
- Iterative Refinement: Refine the design based on user feedback, addressing any issues and enhancing features to better meet user needs.
- Final Design and Production:
- Design Optimization: Finalize the design of the wearable device and mobile app, incorporating improvements from the testing phase.
- Cost Analysis: Ensure the final design remains cost-effective and feasible for DIY assembly, with a target cost of around $100.
- Production Planning: Develop detailed construction manuals and assembly instructions, and prepare the system for mass production and distribution.
- Implementation and Support:
- Community Engagement: Launch an online platform for user support, feedback, and community building, providing resources and assistance for users and caregivers.
- Ongoing Improvement: Monitor user experiences and collect feedback for continuous improvement, including software updates and new feature development.
By following this design method, "TrailBlaze" aims to deliver a robust and user-friendly solution that empowers visually impaired individuals to navigate and communicate effectively in outdoor environments. The approach ensures that the system is both practical and accessible, enhancing the outdoor experience for its users.
3. SOLUTION DESIGN
The "TrailBlaze" system is designed to provide visually impaired individuals with a comprehensive solution for navigating and communicating effectively in outdoor environments. The solution integrates hardware and software components into a cohesive system that ensures ease of use, reliability, and affordability. Here is an overview of the solution design:
1. Wearable Device:
a. Hardware Components:
- GPS Module: Provides real-time location tracking and navigation guidance.
- Proximity Sensors: Detect obstacles in the user’s path, such as rocks or branches, and provide alerts through audio and haptic feedback.
- Microcontroller: Manages sensor inputs, processes navigation algorithms, and controls audio output.
- Audio Output System: Includes speakers or bone conduction technology to deliver clear, real-time audio instructions and alerts.
- Haptic Feedback System: Uses vibrations to complement audio cues, indicating turns, obstacles, or important alerts.
- Power Supply: Rechargeable battery with a long life to support extended use in outdoor environments.
b. Design and Comfort:
- Ergonomic Fit: Designed to be comfortable and secure for long-term wear, with adjustable straps or mounts.
- Durability: Weatherproof and rugged construction to withstand outdoor conditions.
2. Mobile App:
a. Navigation Features:
- Audio Guidance: Provides turn-by-turn spoken directions based on real-time GPS data, guiding users to their destinations.
- Offline Maps: Allows users to download and access maps for areas with limited or no internet connectivity.
- Dynamic Pathfinding: Recalculates routes and adjusts guidance based on detected obstacles or changes in the environment.
b. Communication Features:
- Customizable Audio Phrases: Users can create and manage personalized audio phrases for various situational needs (e.g., asking for help, finding amenities).
- Voice Commands: Allows users to control the app and request information hands-free.
c. Campsite Information:
- Detailed Descriptions: Provides audio descriptions of nearby campsites, including accessibility features and amenities.
- Reservation Support: Guides users through the campsite reservation process.
3.1 HARDWARE
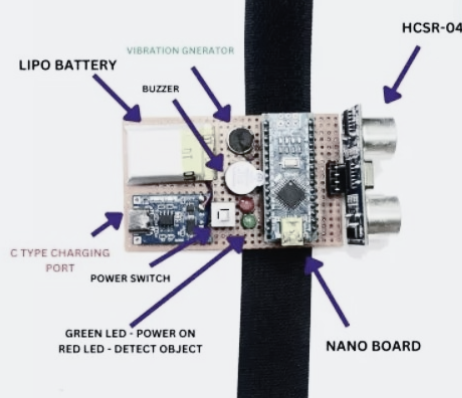
The "TrailBlaze" system's hardware is painstakingly designed to offer a sturdy and dependable outdoor navigation and communication solution. Its GPS module, which provides accurate real-time location monitoring and navigational direction, is at its heart. Complementing this are proximity sensors from companies like Parallax, which identify obstructions like branches and stones and provide alerts via haptic and aural feedback systems. These parts are integrated by a microprocessor, like the Arduino Nano Pico, which also manages navigation algorithms and processes sensor data.
To provide clear, real-time instructions and alerts, the audio output system uses either small speakers from Adafruit or Knowles or bone conduction speakers. Furthermore, the haptic feedback system indicates turns and obstacles with vibrations thanks to vibration motors from SparkFun or Pololu. The gadget is housed in a robust, weather-resistant casing composed of hardy materials that is comfortable to wear for extended periods of time. The system's high-capacity rechargeable lithium-ion battery powers it, ensuring dependable operation even after prolonged outside use.
3.2 ARCHITECTURE
The "TrailBlaze" system architecture integrates multiple components into a cohesive solution for outdoor navigation and communication.
- Central Processing Unit:
- Microcontroller : Acts as the brain of the system, coordinating data from various sensors, managing navigation algorithms, and controlling outputs.
- Navigation and Obstacle Detection:
- GPS Module: Provides real-time location tracking and navigation guidance.
- Proximity Sensors :Detect obstacles in the user’s path and provide distance measurements.
- Communication and Feedback:
- Audio Output System (e.g., bone conduction speakers or miniature speakers): Delivers real-time audio instructions and alerts.
- Haptic Feedback System : Provides tactile feedback for additional alerts and navigation cues.
- Power Supply:
- Rechargeable Lithium-Ion Battery: Powers the entire system, ensuring extended use in outdoor settings.
- Connectivity:
- Bluetooth Module : Facilitates wireless communication between the wearable device and the mobile app, allowing for remote control and data exchange.
- User Interface and Mounting:
- Enclosure: A weatherproof, durable casing houses all internal components, designed for comfort and long-term wear.
- Mounting and Strapping: Adjustable straps and mounting brackets secure the device comfortably on the user.
- Software Integration:
- Mobile App: Complements the wearable device by providing additional features such as customizable audio phrases, offline maps, and campsite information.
The architecture ensures that all components work seamlessly together, providing a reliable and user-friendly solution for visually impaired individuals navigating and communicating in outdoor environments.
3.3 IMPLEMENTATION
The implementation of the "TrailBlaze" system involves several key phases to ensure the development of a functional and user-friendly device for outdoor navigation and communication. Here’s a brief overview of the implementation process:
1. Hardware Assembly:
- Component Selection: Gather all necessary components, including the GPS module, proximity sensors, microcontroller, audio output system, haptic feedback system, power supply, and enclosure materials.
- Circuit Design: Create a circuit schematic to connect the microcontroller with the GPS module, proximity sensors, audio output system, and haptic feedback system. Use a breadboard for initial testing and prototype assembly.
- Soldering and Assembly: Solder the components onto a custom PCB or a prototyping board. Assemble the hardware within the weatherproof enclosure, ensuring all parts are securely mounted and connected.
- Power Management: Integrate the rechargeable lithium-ion battery and power management system to provide stable and long-lasting power.
2. Software Development:
- Firmware Programming: Develop and upload firmware to the microcontroller to handle sensor data, process navigation algorithms, and manage audio and haptic feedback. Use platforms like Arduino IDE or MicroPython for coding.
- Mobile App Development: Create a mobile app to complement the wearable device. The app should support features such as real-time navigation guidance, customizable audio phrases, offline map access, and campsite reservation support. Utilize frameworks like React Native or Flutter for cross-platform development.
3. Integration and Testing:
- System Integration: Connect the hardware components with the mobile app via Bluetooth. Ensure that the data exchange between the wearable device and the app is seamless and reliable.
- Field Testing: Conduct rigorous field tests with visually impaired users in various outdoor environments. Test the accuracy of GPS navigation, effectiveness of obstacle detection, and clarity of audio and haptic feedback.
- User Feedback: Gather feedback from test users to identify any issues or areas for improvement. Adjust the firmware and app based on user input to enhance performance and usability.
4. Finalization and Production:
- Design Refinement: Refine the hardware design based on test results, optimizing the enclosure for comfort and durability. Finalize the software to ensure stability and functionality.
- Documentation: Create detailed construction manuals and assembly instructions for DIY assembly. Prepare online resources, including video tutorials and user guides.
- Production Setup: Plan for the production of the hardware components, either through custom manufacturing or 3D printing. Ensure quality control and consistency in the final product.
5. Deployment and Support:
- Launch: Release the "TrailBlaze" system to the public, making it available for purchase or DIY assembly. Promote the system through online platforms and community networks.
- Ongoing Support: Provide customer support through an online platform, offering assistance, troubleshooting, and updates. Monitor user feedback for continuous improvement and software updates.
This structured implementation process ensures that the "TrailBlaze" system is effectively developed, tested, and deployed, providing a valuable tool for visually impaired individuals to navigate and communicate independently in outdoor settings.
4.1 EVALUATION
An extensive analysis of the "TrailBlaze" system's dependability, performance, and usability is part of the evaluation process. Functional testing guarantees that proximity sensors successfully identify objects and the GPS module enables precise location monitoring and navigation. Additionally evaluated are the haptic feedback system's responsiveness and the audio output's clarity. User experience testing concentrates on the wearable device's comfort, fit, and convenience of use as well as the app's capacity to be customized for the management of audio phrases and profiles. Field testing is carried out in diverse outside settings to assess the system's performance in various scenarios and collect user input for enhancements. Software stability, battery life, and durability are examples of performance and reliability assessments. Verification is conducted to ensure compliance with accessibility rules and regulatory standards. Ongoing feedback, updates, and user training are provided to enable continuous improvement, which aims to improve user satisfaction and functionality.
4.2 THEORETICAL AND PRACTICAL CONTRIBUTION
The "TrailBlaze" system adds to the field of assistive technology for people with visual impairments in both theoretical and practical ways. In theory, the system contributes to our understanding of how to combine real-time audio and haptic feedback mechanisms with a variety of sensor technologies, including proximity and GPS, to improve outdoor navigation and communication. This integration adds to the body of knowledge about the potential applications of multi-sensory feedback in the development of more user-friendly and efficient assistive technology.
The "TrailBlaze" system is a useful practical solution that greatly enhances the safety and independence of visually impaired people. Through the integration of multi-modal feedback, obstacle identification, and real-time GPS navigation, it provides an all-encompassing outdoor navigation tool that tackles practical difficulties. The system is designed with price and ease of use in mind, making it available to a larger range of users. The creation of a mobile application that facilitates customization and integration with wearable devices augments their practical utility by providing users with customized and flexible communication choices. All things considered, the "TrailBlaze" system improves the quality of life for visually impaired people navigating challenging outdoor areas while also pushing theoretical limits and providing a workable, user-centric solution.
4.3 OUTLOOK AND EXTENSIBILITY
There is a great deal of room for improvement and further development of the "TrailBlaze" system. Outlook: To enhance obstacle detection and navigation accuracy, the system can develop to include cutting-edge technologies like artificial intelligence and machine learning. The device could have predictive navigation capabilities by integrating AI, which would allow it to learn from user behavior and provide more logical instructions and alerts.
Extensibility can be attained by adding new features and integrations to the system to increase its capabilities. For example, adding environmental sensors (temperature, humidity, etc.) could improve the outdoor experience by giving users access to real-time weather reports. When combined with other assistive technology, like wearable health monitors or smart canes, this might provide visually impaired people with a complete ecosystem of support.
In order to make the system more accessible to a worldwide audience, future advancements may potentially involve adding support for more languages and regional dialects to the smartphone app. By adding modules or features designed specifically for these types of outdoor activities, the system might be modified for use in hiking, camping, or urban navigation, among other outdoor pursuits.
Furthermore, working together with communities and organizations that prioritize accessibility may spur additional innovation and improvement, guaranteeing that the "TrailBlaze" system will always be able to adapt to the changing demands of its users. This strategy will improve the device's usability while also promoting increased inclusion and assistance for people with visual impairments in a variety of contexts.
{kind=link}

Comments