


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
The project aimed at designing a device capable of providing a virtual tether to visually impaired users of a treadmill. Walking (or running) on a treadmill is a challenging task. Maintaining a position within the limits of the belt is done based exclusively on visual cues. It has been demonstrated that a person can maintain a set position on a treadmill when visual cues (vision) is available, but once vision is occluded (e.g., close eyes) they will drift backwards and fall off the treadmill.
A visually impaired person will not be able to use a treadmill unless they use a tether (usually a cable) that will provide them with the necessary cues to safely maintain their position on the treadmill. However, such an approach provides additional challenges as the rigidity of the tether does not allow much room for variability in the position.
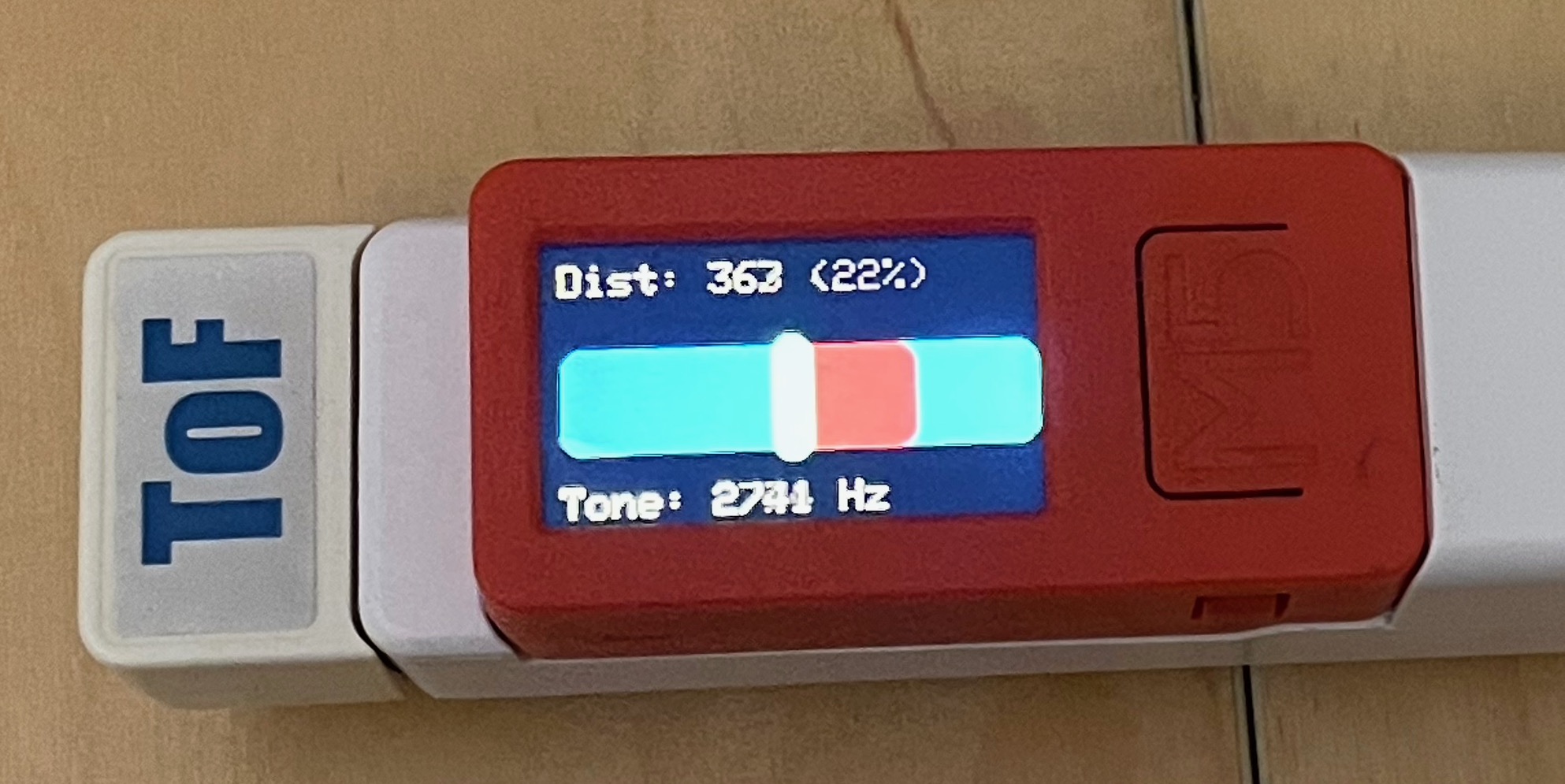
The device I present in this project is aimed at solving the problem of using a treadmill under restricted vision conditions, even in the complete absence of vision. The device is to be located in the front of the treadmill aiming at the user. A time-of-flight (ToF) sensor will measure the position of the user to the front of the treadmill. The position is normalized from 0 to 100 where 50 is the mid position, 0 the frontmost position and 100 the fastest position on the belt. A tone of frequency proportional to the position on the treadmill will be played to the user so that a tone of 1500 Hz will correspond to the mid position, a higher frequency the closer the position gets to the front and a lower frequency the faster it gets.
The principle of operation is that the position on the treadmill is a measure of the speed of the user relative to the treadmill at which the belt is going. When in the mid position, the user is stepping at the same speed as the treadmill belt is going. If the user steps faster than the belt then they will approach the front of the treadmill, and conversely if the step slower than the belt they will approach the back of the treadmill. The higher frequency will be played when the user is going faster than they should, and the lower frequency will be played when they walk slower that they should. The changes in tone are easy to follow and after a little practice the user will know what sound is the one that maintains them in the centre hence being able to use the treadmill even when vision is not a sense that they can rely on.


{kind=link}
{kind=link}
{kind=link}

Comments
Please log in or sign up to comment.