/*
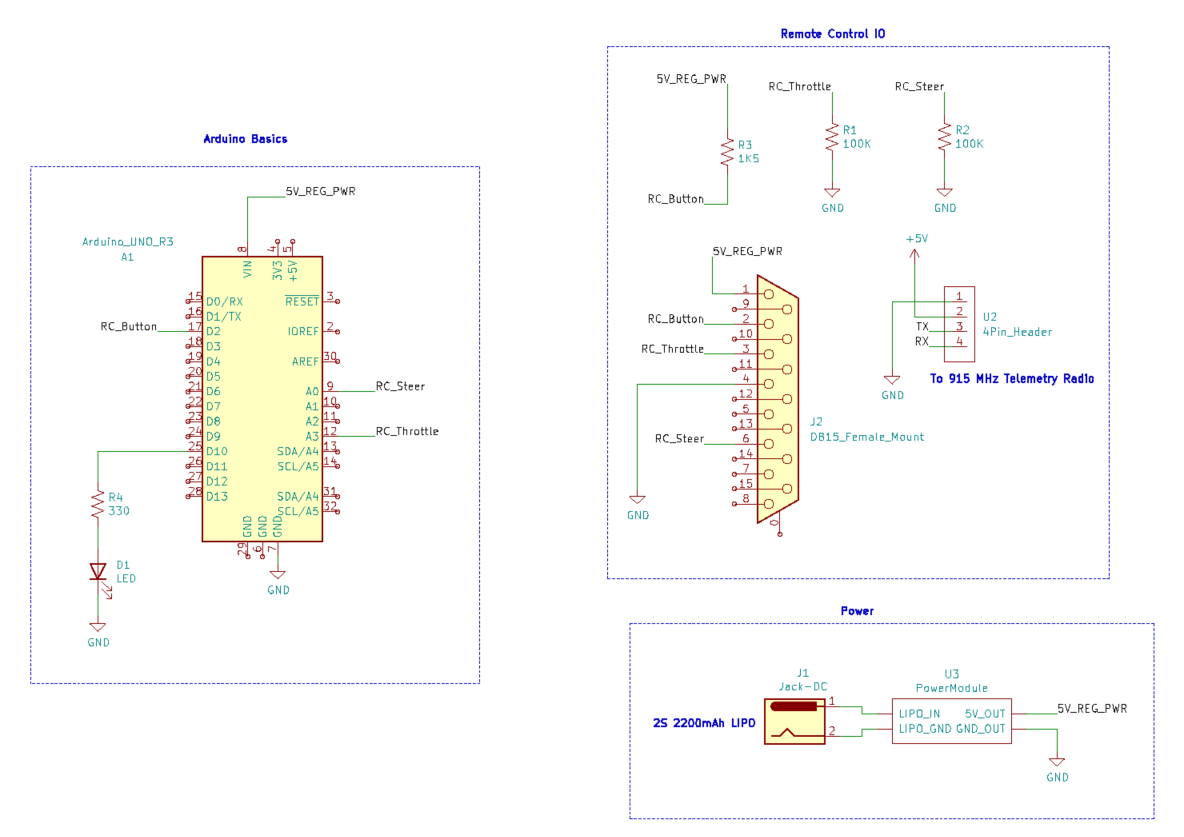
Driver to send vintage joystick inputs to 915 MHz telemetry link
to send to RC car
*/
//#define DEBUG_MODE //debug_mode shows raw ADC
#define STEER_ADC A0
#define THROTTLE_ADC A3
#define LED 10
#define TRIGGER 2
#define BLINK_TIME 250
#define BUTTON 7
char tx_array[24] = {};
unsigned long blink_ctr = 0;
#define MOVING_AVG_FILTER_NUM 5
int smooth_array_steer[MOVING_AVG_FILTER_NUM];
int smooth_array_throttle[MOVING_AVG_FILTER_NUM];
int index_steer = 0;
int sum_steer = 0;
int index_throttle = 0;
int sum_throttle = 0;
int smooth_steer = 0;
int smooth_throttle = 0;
void setup()
{
Serial.begin(57600);
pinMode(STEER_ADC,INPUT);
pinMode(THROTTLE_ADC,INPUT);
pinMode(LED,OUTPUT);
pinMode(TRIGGER,INPUT);
pinMode(BUTTON,INPUT);
}
int mapVal(int curr_val, int minIn, int maxIn, int minOut, int maxOut)
{
return (minOut + ((maxOut - minOut) / (maxIn - minIn) * (curr_val - minIn)));
}
// ADC (steer)
int tx_steer()
{
return mapVal(analogRead(STEER_ADC),960,670,1000,2000);
}
// moving average filter for ADC (throttle)
int tx_throttle()
{
sum_throttle = sum_throttle - smooth_array_throttle[index_throttle];
uint8_t temp_value = analogRead(THROTTLE_ADC);
smooth_array_throttle[index_throttle] = temp_value;
sum_throttle += temp_value;
index_throttle = (index_throttle+1) % MOVING_AVG_FILTER_NUM;
smooth_throttle = sum_throttle / MOVING_AVG_FILTER_NUM;
int converted_throttle = mapVal(smooth_throttle,27,252,1000,1240);
if (converted_throttle > 1200) return 1200;
else return converted_throttle;
}
void loop()
{
if (digitalRead(TRIGGER) == LOW)
{
if (millis() - blink_ctr > BLINK_TIME)
{
blink_ctr = millis();
digitalWrite(LED,HIGH);
}
else
{
digitalWrite(LED,LOW);
}
#ifdef DEBUG_MODE
sprintf(tx_array,"T: %d S: %d\n",analogRead(THROTTLE_ADC),analogRead(STEER_ADC));
#else
sprintf(tx_array,"%d,%d#\n",tx_throttle(),tx_steer());
#endif
}
else
{
sprintf(tx_array,"%d,%d#\n",990,1500);
}
Serial.print(tx_array);
delay(50);
}





_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.