


"To invent, you need a good imagination and a pile of junk."
― Thomas Edison
PrefaceDuring the Spring Semester of my freshman year at Berkeley, I competed in the IEEE Central Area Meeting competition in a team of five students. We essentially strove to build this in a semester:
Looks pretty cool, right? Albeit it's not the easiest robot to make! These 12 weeks were extremely fun and I learned so much.
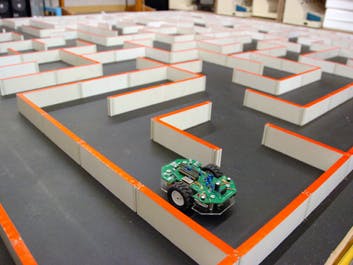
Mission Statement"In this contest the contestant or team of contestants design and build an autonomous robotic "mouse" that negotiates a maze of standard dimensions from a specified corner to its center in the shortest time."
Conceptualizing the MouseWhen building our mouse, we wanted it to be as light as possible. Our mouse was designed to have a round chassis, along with infrared and ultrasonic sensors. The round chassis would allow for smoother rotations. The infrared and ultrasonic sensors were used for detecting walls. The algorithm we implemented was the flood-fill algorithm, as we found that was the most efficient algorithm for this competition.
How I ContributedI was designated to aid both the software and hardware developers on the team. This required knowledge of the Hardware/Software interface. I was responsible for parsing code from software to hardware and vice versa, to ensure that communication between the two interfaces was reliable.
What I LearnedI experienced what it is like to work in an engineering environment.This is definitely one of the most important aspects of this experience. The fields of Computer Science and Engineering bring together people who LOVE innovation and optimization. Throughout this project, we were not afraid to scrap original ideas if removing them unearthed new ways to optimize our robot.
I familiarized myself with the Hardware and Software interfaces.In building our mouse, as with building any autonomous robot, we needed the interface between hardware and software to be seamless. We built our robot around the Arduino Yún micro-controller and utilized sensors in accordance to the type of algorithm we implemented. This was the first time I had ever built any sort of robot or programmed in C++.





Comments
Please log in or sign up to comment.