void setup() {
}
//////Running code with board maneger verstion 1.0.6
#define button 23 //IR Sensor
#define RXp2 16
#define TXp2 17
#include "Audio.h"
#include "CloudSpeechClient.h"
int i=0;
void setup() {
pinMode(button, INPUT);
pinMode(led_1,OUTPUT);
pinMode(led_2,OUTPUT);
pinMode(led_3,OUTPUT);
Serial.begin(115200);
Serial2.begin(115200, SERIAL_8N1, RXp2,TXp2);
Serial2.println("Intialising");
// Serial.println(My_Data);
}
void loop() {
digitalWrite(led_1, 0);
digitalWrite(led_2, 0);
digitalWrite(led_3, 0);
if(i==0){
Serial.println("Press button");
i=1;
}
// if(i==1){delay(1);}
delay(500);
if(digitalRead(button)==0){
Serial2.println("\r\nPlease Ask!\r\n");
digitalWrite(led_1, 1);
digitalWrite(led_2, 0);
digitalWrite(led_3, 0);
delay(2100);
Serial.println("\r\nRecord start!\r\n");
//Serial2.println("\r\nRecord start!\r\n");
Audio* audio = new Audio(ADMP441);
//Audio* audio = new Audio(M5STACKFIRE);
audio->Record();
Serial.println("Recoding Complited Processing");
digitalWrite(led_1,0);
digitalWrite(led_3,0);
digitalWrite(led_2,1);
CloudSpeechClient* cloudSpeechClient = new CloudSpeechClient(USE_APIKEY);
cloudSpeechClient->Transcribe(audio);
delete cloudSpeechClient;
delete audio;
i=0;
}
if(digitalRead(button)==1){
delay(1);
}
}
//////////////////////
Audio.cpp
#include "Audio.h"
Audio::Audio(MicType micType) {
wavData = new char*[wavDataSize/dividedWavDataSize];
for (int i = 0; i < wavDataSize/dividedWavDataSize; ++i) wavData[i] = new char[dividedWavDataSize];
i2s = new I2S(micType);
}
Audio::~Audio() {
for (int i = 0; i < wavDataSize/dividedWavDataSize; ++i) delete[] wavData[i];
delete[] wavData;
delete i2s;
}
void Audio::CreateWavHeader(byte* header, int waveDataSize){
header[0] = 'R';
header[1] = 'I';
header[2] = 'F';
header[3] = 'F';
unsigned int fileSizeMinus8 = waveDataSize + 44 - 8;
header[4] = (byte)(fileSizeMinus8 & 0xFF);
header[5] = (byte)((fileSizeMinus8 >> 8) & 0xFF);
header[6] = (byte)((fileSizeMinus8 >> 16) & 0xFF);
header[7] = (byte)((fileSizeMinus8 >> 24) & 0xFF);
header[8] = 'W';
header[9] = 'A';
header[10] = 'V';
header[11] = 'E';
header[12] = 'f';
header[13] = 'm';
header[14] = 't';
header[15] = ' ';
header[16] = 0x10; // linear PCM
header[17] = 0x00;
header[18] = 0x00;
header[19] = 0x00;
header[20] = 0x01; // linear PCM
header[21] = 0x00;
header[22] = 0x01; // monoral
header[23] = 0x00;
header[24] = 0x80; // sampling rate 16000
header[25] = 0x3E;
header[26] = 0x00;
header[27] = 0x00;
header[28] = 0x00; // Byte/sec = 16000x2x1 = 32000
header[29] = 0x7D;
header[30] = 0x00;
header[31] = 0x00;
header[32] = 0x02; // 16bit monoral
header[33] = 0x00;
header[34] = 0x10; // 16bit
header[35] = 0x00;
header[36] = 'd';
header[37] = 'a';
header[38] = 't';
header[39] = 'a';
header[40] = (byte)(waveDataSize & 0xFF);
header[41] = (byte)((waveDataSize >> 8) & 0xFF);
header[42] = (byte)((waveDataSize >> 16) & 0xFF);
header[43] = (byte)((waveDataSize >> 24) & 0xFF);
}
void Audio::Record() {
CreateWavHeader(paddedHeader, wavDataSize);
int bitBitPerSample = i2s->GetBitPerSample();
if (bitBitPerSample == 16) {
for (int j = 0; j < wavDataSize/dividedWavDataSize; ++j) {
i2s->Read(i2sBuffer, i2sBufferSize/2);
for (int i = 0; i < i2sBufferSize/8; ++i) {
wavData[j][2*i] = i2sBuffer[4*i + 2];
wavData[j][2*i + 1] = i2sBuffer[4*i + 3];
}
}
}
else if (bitBitPerSample == 32) {
for (int j = 0; j < wavDataSize/dividedWavDataSize; ++j) {
i2s->Read(i2sBuffer, i2sBufferSize);
for (int i = 0; i < i2sBufferSize/8; ++i) {
wavData[j][2*i] = i2sBuffer[8*i + 2];
wavData[j][2*i + 1] = i2sBuffer[8*i + 3];
}
}
}
}
/////////////////
Audio.h
#ifndef _AUDIO_H
#define _AUDIO_H
#include <Arduino.h>
#include "I2S.h"
// 16bit, monoral, 16000Hz, linear PCM
class Audio {
I2S* i2s;
static const int headerSize = 44;
static const int i2sBufferSize = 12000;
char i2sBuffer[i2sBufferSize];
void CreateWavHeader(byte* header, int waveDataSize);
public:
static const int wavDataSize = 90000; // It must be multiple of dividedWavDataSize. Recording time is about 1.9 second.
static const int dividedWavDataSize = i2sBufferSize/4;
char** wavData; // It's divided. Because large continuous memory area can't be allocated in esp32.
byte paddedHeader[headerSize + 4] = {0}; // The size must be multiple of 3 for Base64 encoding. Additional byte size must be even because wave data is 16bit.
Audio(MicType micType);
~Audio();
void Record();
};
#endif // _AUDIO_H
//////////////
CloudSpeechClient.cpp
#include "CloudSpeechClient.h"
#include "network_param.h"
#include <base64.h>
#include <ArduinoJson.h>
#define USE_SERIAL Serial
#include <Arduino.h>
#include <HTTPClient.h>
//#include <SoftwareSerial.h>
////SoftwareSerial (D4, D2);
const char* chatgpt_token = "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";
CloudSpeechClient::CloudSpeechClient(Authentication authentication) {
this->authentication = authentication;
WiFi.begin(ssid, password);
// while (WiFi.status() == WL_CONNECTED){ digitalWrite(led_3,1);}
while (WiFi.status() != WL_CONNECTED) delay(1000);
client.setCACert(root_ca);
if (!client.connect(server, 443)) Serial.println("Connection failed!");
}
String ans;
CloudSpeechClient::~CloudSpeechClient() {
client.stop();
WiFi.disconnect();
}
void CloudSpeechClient::PrintHttpBody2(Audio* audio)
{
String enc = base64::encode(audio->paddedHeader, sizeof(audio->paddedHeader));
enc.replace("\n", ""); // delete last "\n"
client.print(enc); // HttpBody2
char** wavData = audio->wavData;
for (int j = 0; j < audio->wavDataSize / audio->dividedWavDataSize; ++j) {
enc = base64::encode((byte*)wavData[j], audio->dividedWavDataSize);
enc.replace("\n", "");// delete last "\n"
client.print(enc); // HttpBody2
}
}
void CloudSpeechClient::Transcribe(Audio* audio) {
String HttpBody1 = "{\"config\":{\"encoding\":\"LINEAR16\",\"sampleRateHertz\":16000,\"languageCode\":\"en-IN\"},\"audio\":{\"content\":\"";
String HttpBody3 = "\"}}\r\n\r\n";
int httpBody2Length = (audio->wavDataSize + sizeof(audio->paddedHeader)) * 4 / 3; // 4/3 is from base64 encoding
String ContentLength = String(HttpBody1.length() + httpBody2Length + HttpBody3.length());
String HttpHeader;
// if (authentication == USE_APIKEY)
HttpHeader = String("POST /v1/speech:recognize?key=") + ApiKey
+ String(" HTTP/1.1\r\nHost: speech.googleapis.com\r\nContent-Type: application/json\r\nContent-Length: ") + ContentLength + String("\r\n\r\n");
// else if (authentication == USE_ACCESSTOKEN)
// HttpHeader = String("POST /v1beta1/speech:syncrecognize HTTP/1.1\r\nHost: speech.googleapis.com\r\nContent-Type: application/json\r\nAuthorization: Bearer ")
// + AccessToken + String("\r\nContent-Length: ") + ContentLength + String("\r\n\r\n");
client.print(HttpHeader);
client.print(HttpBody1);
PrintHttpBody2(audio);
client.print(HttpBody3);
String My_Answer="";
while (!client.available());
while (client.available())
{
char temp = client.read();
My_Answer = My_Answer + temp;
// Serial.write(client.read());
}
// Serial.print("My Answer - ");Serial.println(My_Answer);
int postion = My_Answer.indexOf('{');
// Serial.println(postion);
ans = My_Answer.substring(postion);
Serial.print("Json daata--");
//Serial.print(ans);
DynamicJsonDocument doc(384);
//StaticJsonDocument<384> doc;
DeserializationError error = deserializeJson(doc, ans);
if (error) {
Serial.print("deserializeJson() failed: ");
Serial.println(error.c_str());
return;
}
JsonObject results_0 = doc["results"][0];
//const char*
const char* chatgpt_Q = results_0["alternatives"][0]["transcript"];
Serial.print(chatgpt_Q);Serial.println("-");
//////////////////////////////////////////////////////////
Serial.println("Asking Chat GPT");
HTTPClient https;
Serial.print("[HTTPS] begin...\n");
if (https.begin("https://api.openai.com/v1/completions")) { // HTTPS
https.addHeader("Content-Type", "application/json");
String token_key = String("Bearer ") + chatgpt_token;
https.addHeader("Authorization", token_key);
String payload = String("{\"model\": \"text-davinci-003\", \"prompt\": ") +"\""+ chatgpt_Q +"\"" + String(", \"temperature\": 0.2, \"max_tokens\": 40}"); //Instead of TEXT as Payload, can be JSON as Paylaod
Serial.print("[HTTPS] GET...\n");
// start connection and send HTTP header
int httpCode = https.POST(payload);
// httpCode will be negative on error
// file found at server
if (httpCode == HTTP_CODE_OK || httpCode == HTTP_CODE_MOVED_PERMANENTLY) {
String payload = https.getString();
Serial.println(payload);
// Serial2.println(payload);
//////////////////////////////////////////////////
StaticJsonDocument<2000> doc2;
DeserializationError error = deserializeJson(doc2, payload);
if (error) {
Serial.print("deserializeJson() failed: ");
Serial.println(error.c_str());
return;
}
JsonObject choices_0 = doc2["choices"][0];
const char* only_ans = choices_0["text"];
Serial.println("Only ans:-");Serial.print(only_ans);
Serial2.print(only_ans);
delay(1);
//digitalWrite(uart_en,HIGH);
/////////////////////////////////////////////////////////
}
else {
Serial.printf("[HTTPS] GET... failed, error: %s\n", https.errorToString(httpCode).c_str());
}
https.end();
}
else {
Serial.printf("[HTTPS] Unable to connect\n");
}
Serial.print("To ask again");
//delay(10000);
}
///////////////////////////////////////////////////////////
/*
*/
}
///////////////////
CloudSpeechClient.h
#ifndef _CLOUDSPEECHCLIENT_H
#define _CLOUDSPEECHCLIENT_H
#include <WiFiClientSecure.h>
#include "Audio.h"
enum Authentication {
USE_ACCESSTOKEN,
USE_APIKEY
};
class CloudSpeechClient {
WiFiClientSecure client;
void PrintHttpBody2(Audio* audio);
Authentication authentication;
public:
CloudSpeechClient(Authentication authentication);
~CloudSpeechClient();
void Transcribe(Audio* audio);
};
#endif // _CLOUDSPEECHCLIENT_H
/////////////////
I2S.cpp
#include "I2S.h"
#define SAMPLE_RATE (16000)
#define PIN_I2S_BCLK 26
#define PIN_I2S_LRC 22
#define PIN_I2S_DIN 34
#define PIN_I2S_DOUT 25
// This I2S specification :
// - LRC high is channel 2 (right).
// - LRC signal transitions once each word.
// - DATA is valid on the CLOCK rising edge.
// - Data bits are MSB first.
// - DATA bits are left-aligned with respect to LRC edge.
// - DATA bits are right-shifted by one with respect to LRC edges.
I2S::I2S(MicType micType) {
if (micType == M5GO || micType == M5STACKFIRE ) {
BITS_PER_SAMPLE = I2S_BITS_PER_SAMPLE_16BIT;
i2s_config_t i2s_config = {
.mode = (i2s_mode_t)(I2S_MODE_MASTER | I2S_MODE_RX | I2S_MODE_TX | I2S_MODE_DAC_BUILT_IN | I2S_MODE_ADC_BUILT_IN),
.sample_rate = SAMPLE_RATE,
.bits_per_sample = BITS_PER_SAMPLE,
.channel_format = I2S_CHANNEL_FMT_RIGHT_LEFT,
.communication_format = (i2s_comm_format_t)(I2S_COMM_FORMAT_I2S_MSB),
.intr_alloc_flags = 0,
.dma_buf_count = 2,
.dma_buf_len = 1024
};
i2s_driver_install(I2S_NUM_0, &i2s_config, 0, NULL);
i2s_set_adc_mode(ADC_UNIT_1, ADC1_CHANNEL_6);
i2s_set_clk(I2S_NUM_0, SAMPLE_RATE, BITS_PER_SAMPLE, I2S_CHANNEL_STEREO);
i2s_adc_enable(I2S_NUM_0);
}
else if (micType == ADMP441 || micType == ICS43434 ) {
BITS_PER_SAMPLE = I2S_BITS_PER_SAMPLE_32BIT;
i2s_config_t i2s_config = {
.mode = (i2s_mode_t)(I2S_MODE_MASTER | I2S_MODE_RX),
.sample_rate = SAMPLE_RATE,
.bits_per_sample = BITS_PER_SAMPLE,
.channel_format = I2S_CHANNEL_FMT_RIGHT_LEFT,
.communication_format = (i2s_comm_format_t)(I2S_COMM_FORMAT_I2S | I2S_COMM_FORMAT_I2S_MSB),
.intr_alloc_flags = 0,
.dma_buf_count = 16,
.dma_buf_len = 60
};
i2s_pin_config_t pin_config;
pin_config.bck_io_num = PIN_I2S_BCLK;
pin_config.ws_io_num = PIN_I2S_LRC;
pin_config.data_out_num = I2S_PIN_NO_CHANGE;
pin_config.data_in_num = PIN_I2S_DIN;
i2s_driver_install(I2S_NUM_0, &i2s_config, 0, NULL);
i2s_set_pin(I2S_NUM_0, &pin_config);
i2s_set_clk(I2S_NUM_0, SAMPLE_RATE, BITS_PER_SAMPLE, I2S_CHANNEL_STEREO);
}
}
int I2S::Read(char* data, int numData) {
return i2s_read_bytes(I2S_NUM_0, (char *)data, numData, portMAX_DELAY);
}
int I2S::GetBitPerSample() {
return (int)BITS_PER_SAMPLE;
}
///////////////////
I2S.h
#include "I2S.h"
#define SAMPLE_RATE (16000)
#define PIN_I2S_BCLK 26
#define PIN_I2S_LRC 22
#define PIN_I2S_DIN 34
#define PIN_I2S_DOUT 25
// This I2S specification :
// - LRC high is channel 2 (right).
// - LRC signal transitions once each word.
// - DATA is valid on the CLOCK rising edge.
// - Data bits are MSB first.
// - DATA bits are left-aligned with respect to LRC edge.
// - DATA bits are right-shifted by one with respect to LRC edges.
I2S::I2S(MicType micType) {
if (micType == M5GO || micType == M5STACKFIRE ) {
BITS_PER_SAMPLE = I2S_BITS_PER_SAMPLE_16BIT;
i2s_config_t i2s_config = {
.mode = (i2s_mode_t)(I2S_MODE_MASTER | I2S_MODE_RX | I2S_MODE_TX | I2S_MODE_DAC_BUILT_IN | I2S_MODE_ADC_BUILT_IN),
.sample_rate = SAMPLE_RATE,
.bits_per_sample = BITS_PER_SAMPLE,
.channel_format = I2S_CHANNEL_FMT_RIGHT_LEFT,
.communication_format = (i2s_comm_format_t)(I2S_COMM_FORMAT_I2S_MSB),
.intr_alloc_flags = 0,
.dma_buf_count = 2,
.dma_buf_len = 1024
};
i2s_driver_install(I2S_NUM_0, &i2s_config, 0, NULL);
i2s_set_adc_mode(ADC_UNIT_1, ADC1_CHANNEL_6);
i2s_set_clk(I2S_NUM_0, SAMPLE_RATE, BITS_PER_SAMPLE, I2S_CHANNEL_STEREO);
i2s_adc_enable(I2S_NUM_0);
}
else if (micType == ADMP441 || micType == ICS43434 ) {
BITS_PER_SAMPLE = I2S_BITS_PER_SAMPLE_32BIT;
i2s_config_t i2s_config = {
.mode = (i2s_mode_t)(I2S_MODE_MASTER | I2S_MODE_RX),
.sample_rate = SAMPLE_RATE,
.bits_per_sample = BITS_PER_SAMPLE,
.channel_format = I2S_CHANNEL_FMT_RIGHT_LEFT,
.communication_format = (i2s_comm_format_t)(I2S_COMM_FORMAT_I2S | I2S_COMM_FORMAT_I2S_MSB),
.intr_alloc_flags = 0,
.dma_buf_count = 16,
.dma_buf_len = 60
};
i2s_pin_config_t pin_config;
pin_config.bck_io_num = PIN_I2S_BCLK;
pin_config.ws_io_num = PIN_I2S_LRC;
pin_config.data_out_num = I2S_PIN_NO_CHANGE;
pin_config.data_in_num = PIN_I2S_DIN;
i2s_driver_install(I2S_NUM_0, &i2s_config, 0, NULL);
i2s_set_pin(I2S_NUM_0, &pin_config);
i2s_set_clk(I2S_NUM_0, SAMPLE_RATE, BITS_PER_SAMPLE, I2S_CHANNEL_STEREO);
}
}
int I2S::Read(char* data, int numData) {
return i2s_read_bytes(I2S_NUM_0, (char *)data, numData, portMAX_DELAY);
}
int I2S::GetBitPerSample() {
return (int)BITS_PER_SAMPLE;
}
/////////////////
network_param.h
#ifndef _NETWORK_PARAM_H
#define _NETWORK_PARAM_H
const char *ssid = "****";
const char *password = "*****";
const char* server = "speech.googleapis.com";
// To get the certificate for your region run:
// openssl s_client -showcerts -connect speech.googleapis.com:443
// Copy the certificate (all lines between and including ---BEGIN CERTIFICATE---
// and --END CERTIFICATE--) to root.cert and put here on the root_cert variable.
const char* root_ca=
"-----BEGIN CERTIFICATE-----\n"
"MIIFljCCA36gAwIBAgINAgO8U1lrNMcY9QFQZjANBgkqhkiG9w0BAQsFADBHMQsw\n"
"CQYDVQQGEwJVUzEiMCAGA1UEChMZR29vZ2xlIFRydXN0IFNlcnZpY2VzIExMQzEU\n"
"MBIGA1UEAxMLR1RTIFJvb3QgUjEwHhcNMjAwODEzMDAwMDQyWhcNMjcwOTMwMDAw\n"
"MDQyWjBGMQswCQYDVQQGEwJVUzEiMCAGA1UEChMZR29vZ2xlIFRydXN0IFNlcnZp\n"
"Y2VzIExMQzETMBEGA1UEAxMKR1RTIENBIDFDMzCCASIwDQYJKoZIhvcNAQEBBQAD\n"
"ggEPADCCAQoCggEBAPWI3+dijB43+DdCkH9sh9D7ZYIl/ejLa6T/belaI+KZ9hzp\n"
"kgOZE3wJCor6QtZeViSqejOEH9Hpabu5dOxXTGZok3c3VVP+ORBNtzS7XyV3NzsX\n"
"lOo85Z3VvMO0Q+sup0fvsEQRY9i0QYXdQTBIkxu/t/bgRQIh4JZCF8/ZK2VWNAcm\n"
"BA2o/X3KLu/qSHw3TT8An4Pf73WELnlXXPxXbhqW//yMmqaZviXZf5YsBvcRKgKA\n"
"gOtjGDxQSYflispfGStZloEAoPtR28p3CwvJlk/vcEnHXG0g/Zm0tOLKLnf9LdwL\n"
"tmsTDIwZKxeWmLnwi/agJ7u2441Rj72ux5uxiZ0CAwEAAaOCAYAwggF8MA4GA1Ud\n"
"DwEB/wQEAwIBhjAdBgNVHSUEFjAUBggrBgEFBQcDAQYIKwYBBQUHAwIwEgYDVR0T\n"
"AQH/BAgwBgEB/wIBADAdBgNVHQ4EFgQUinR/r4XN7pXNPZzQ4kYU83E1HScwHwYD\n"
"VR0jBBgwFoAU5K8rJnEaK0gnhS9SZizv8IkTcT4waAYIKwYBBQUHAQEEXDBaMCYG\n"
"CCsGAQUFBzABhhpodHRwOi8vb2NzcC5wa2kuZ29vZy9ndHNyMTAwBggrBgEFBQcw\n"
"AoYkaHR0cDovL3BraS5nb29nL3JlcG8vY2VydHMvZ3RzcjEuZGVyMDQGA1UdHwQt\n"
"MCswKaAnoCWGI2h0dHA6Ly9jcmwucGtpLmdvb2cvZ3RzcjEvZ3RzcjEuY3JsMFcG\n"
"A1UdIARQME4wOAYKKwYBBAHWeQIFAzAqMCgGCCsGAQUFBwIBFhxodHRwczovL3Br\n"
"aS5nb29nL3JlcG9zaXRvcnkvMAgGBmeBDAECATAIBgZngQwBAgIwDQYJKoZIhvcN\n"
"AQELBQADggIBAIl9rCBcDDy+mqhXlRu0rvqrpXJxtDaV/d9AEQNMwkYUuxQkq/BQ\n"
"cSLbrcRuf8/xam/IgxvYzolfh2yHuKkMo5uhYpSTld9brmYZCwKWnvy15xBpPnrL\n"
"RklfRuFBsdeYTWU0AIAaP0+fbH9JAIFTQaSSIYKCGvGjRFsqUBITTcFTNvNCCK9U\n"
"+o53UxtkOCcXCb1YyRt8OS1b887U7ZfbFAO/CVMkH8IMBHmYJvJh8VNS/UKMG2Yr\n"
"PxWhu//2m+OBmgEGcYk1KCTd4b3rGS3hSMs9WYNRtHTGnXzGsYZbr8w0xNPM1IER\n"
"lQCh9BIiAfq0g3GvjLeMcySsN1PCAJA/Ef5c7TaUEDu9Ka7ixzpiO2xj2YC/WXGs\n"
"Yye5TBeg2vZzFb8q3o/zpWwygTMD0IZRcZk0upONXbVRWPeyk+gB9lm+cZv9TSjO\n"
"z23HFtz30dZGm6fKa+l3D/2gthsjgx0QGtkJAITgRNOidSOzNIb2ILCkXhAd4FJG\n"
"AJ2xDx8hcFH1mt0G/FX0Kw4zd8NLQsLxdxP8c4CU6x+7Nz/OAipmsHMdMqUybDKw\n"
"juDEI/9bfU1lcKwrmz3O2+BtjjKAvpafkmO8l7tdufThcV4q5O8DIrGKZTqPwJNl\n"
"1IXNDw9bg1kWRxYtnCQ6yICmJhSFm/Y3m6xv+cXDBlHz4n/FsRC6UfTd\n"
"-----END CERTIFICATE-----\n";
// Getting Access Token :
// At first, you should get service account key (JSON file).
// Type below command in Google Cloud Shell to get AccessToken:
// $ gcloud auth activate-service-account --key-file=KEY_FILE (KEY_FILE is your service account key file)
// $ gcloud auth print-access-token
// The Access Token is expired in an hour.
// Google recommends to use Access Token.
//const String AccessToken = "";
// It is also possible to use "API Key" instead of "Access Token". It doesn't have time limit.
const String ApiKey = "********";
// see https://cloud.google.com/docs/authentication?hl=ja#getting_credentials_for_server-centric_flow
// see https://qiita.com/basi/items/3623a576b754f738138e (Japanese)
#endif // _NETWORK_PARAM_Hvoid loop()
{
}//include libraries:
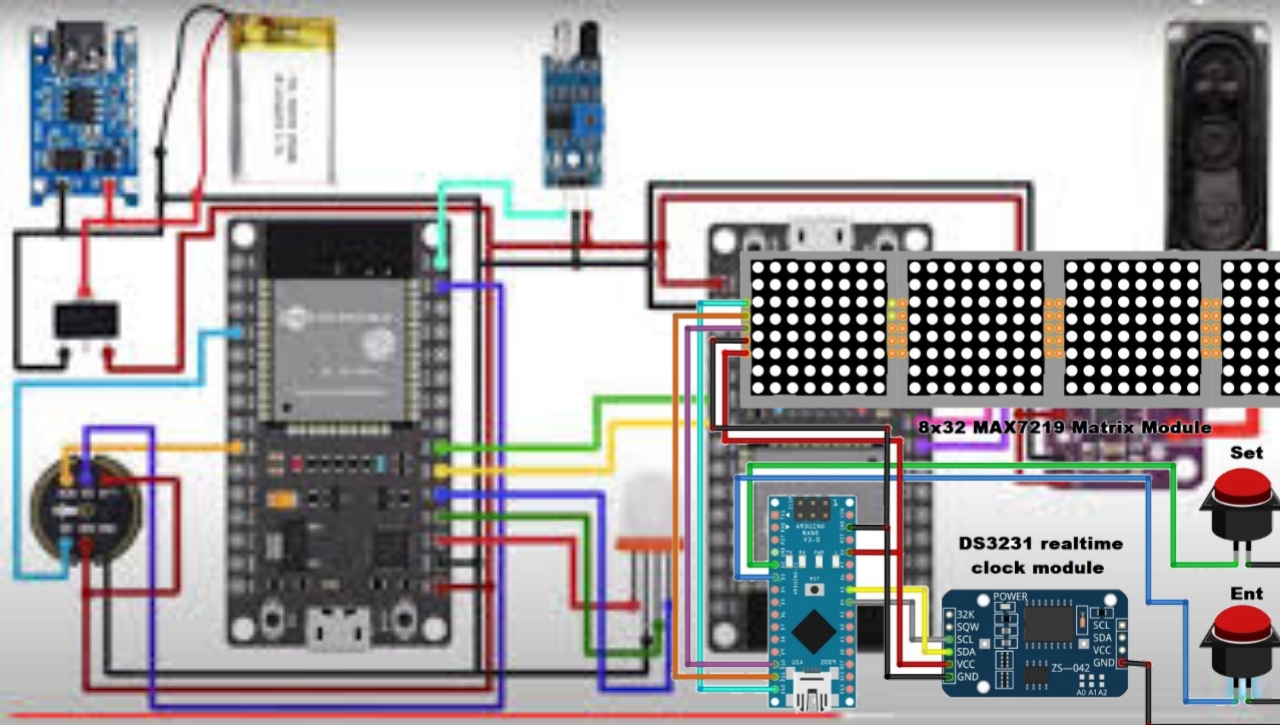
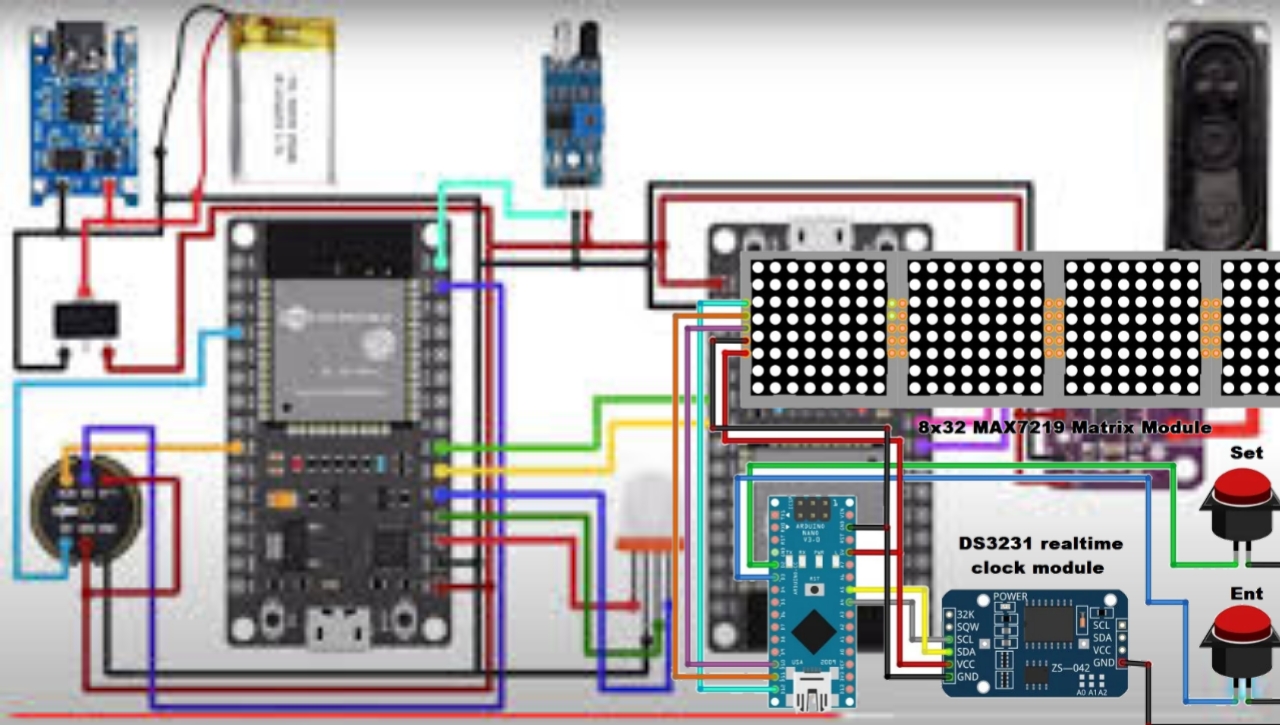
#include "LedControl.h"
#include <FontLEDClock.h> // Font library
#include <Wire.h> // DS1307 clock
#include "RTClib.h" // DS1307 clock
#include <Button.h> // Button library by Alexander Brevig
// Setup LED Matrix
// pin 10 is connected to the DataIn on the display
// pin 12 is connected to the CLK on the display
// pin 11 is connected to LOAD on the display(cs)
LedControl lc = LedControl(10, 12, 11, 4); //sets the 3 pins as 12, 11 & 10 and then sets 4 displays (max is 8 displays)
//global variables
byte intensity = 7; // Default intensity/brightness (0-15)
byte clock_mode = 0; // Default clock mode. Default = 0 (basic_mode)
bool random_mode = 0; // Define random mode - changes the display type every few hours. Default = 0 (off)
byte old_mode = clock_mode; // Stores the previous clock mode, so if we go to date or whatever, we know what mode to go back to after.
bool ampm = 0; // Define 12 or 24 hour time. 0 = 24 hour. 1 = 12 hour
byte change_mode_time = 0; // Holds hour when clock mode will next change if in random mode.
unsigned long delaytime = 500; // We always wait a bit between updates of the display
int rtc[7]; // Holds real time clock output
char days[7][4] = {
"Sun", "Mon", "Tue", "Wed", "Thu", "Fri", "Sat"
}; //day array - used in slide, basic_mode and jumble modes (The DS1307 outputs 1-7 values for day of week)
char daysfull[7][9] = {
"Sunday", "Monday", "Tuesday", "Wed", "Thursday", "Friday", "Saturday"
};
char suffix[4][3] = {
"st", "nd", "rd", "th"
}; //date suffix array, used in slide, basic_mode and jumble modes. e,g, 1st 2nd ...
//define constants
#define NUM_DISPLAY_MODES 3 // Number display modes (conting zero as the first mode)
#define NUM_SETTINGS_MODES 4 // Number settings modes = 6 (conting zero as the first mode)
#define SLIDE_DELAY 20 // The time in milliseconds for the slide effect per character in slide mode. Make this higher for a slower effect
#define cls clear_display // Clear display
RTC_DS1307 ds1307; // Create RTC object
Button buttonA = Button(2, BUTTON_PULLUP); // Setup button A (using button library)
Button buttonB = Button(3, BUTTON_PULLUP); // Setup button B (using button library)
void setup() {
digitalWrite(2, HIGH); // turn on pullup resistor for button on pin 2
digitalWrite(3, HIGH); // turn on pullup resistor for button on pin 3
digitalWrite(4, HIGH); // turn on pullup resistor for button on pin 4
Serial.begin(9600); //start serial
//initialize the 4 matrix panels
//we have already set the number of devices when we created the LedControl
int devices = lc.getDeviceCount();
//we have to init all devices in a loop
for (int address = 0; address < devices; address++) {
/*The MAX72XX is in power-saving mode on startup*/
lc.shutdown(address, false);
/* Set the brightness to a medium values */
lc.setIntensity(address, intensity);
/* and clear the display */
lc.clearDisplay(address);
}
//Setup DS1307 RTC
#ifdef AVR
Wire.begin();
#else
Wire1.begin(); // Shield I2C pins connect to alt I2C bus on Arduino
#endif
ds1307.begin(); //start RTC Clock
if (! ds1307.isrunning()) {
Serial.println("RTC is NOT running!");
ds1307.adjust(DateTime(__DATE__, __TIME__)); // sets the RTC to the date & time this sketch was compiled
}
//Show software version & hello message
printver();
//enable red led
digitalWrite(13, HIGH);
}
void loop() {
//run the clock with whatever mode is set by clock_mode - the default is set at top of code.
switch (clock_mode){
case 0:
basic_mode();
break;
case 1:
small_mode();
break;
case 2:
slide();
break;
case 3:
word_clock();
break;
case 4:
setup_menu();
break;
}
}
//plot a point on the display
void plot (byte x, byte y, byte val) {
//select which matrix depending on the x coord
byte address;
if (x >= 0 && x <= 7) {
address = 3;
}
if (x >= 8 && x <= 15) {
address = 2;
x = x - 8;
}
if (x >= 16 && x <= 23) {
address = 1;
x = x - 16;
}
if (x >= 24 && x <= 31) {
address = 0;
x = x - 24;
}
if (val == 1) {
// lc.setLed(address, y, x, true);
lc.setLed(address, 7-y, x, true);
} else {
// lc.setLed(address, y, x, false);
lc.setLed(address, 7-y, x, false);
}
}
//clear screen
void clear_display() {
for (byte address = 0; address < 4; address++) {
lc.clearDisplay(address);
}
}
//fade screen down
void fade_down() {
//fade from global intensity to 1
for (byte i = intensity; i > 0; i--) {
for (byte address = 0; address < 4; address++) {
lc.setIntensity(address, i);
}
delay(30); //change this to change fade down speed
}
clear_display(); //clear display completely (off)
//reset intentsity to global val
for (byte address = 0; address < 4; address++) {
lc.setIntensity(address, intensity);
}
}
//power up led test & display software version number
void printver() {
byte i = 0;
char ver_a[9] = "Vers 1.0";
char ver_b[9] = " Hello! ";
//test all leds.
for (byte x = 0; x <= 31; x++) {
for (byte y = 0; y <= 7; y++) {
plot(x, y, 1);
}
}
delay(500);
fade_down();
while (ver_a[i]) {
puttinychar((i * 4), 1, ver_a[i]);
delay(35);
i++;
}
delay(700);
fade_down();
i = 0;
while (ver_b[i]) {
puttinychar((i * 4), 1, ver_b[i]);
delay(35);
i++;
}
delay(700);
fade_down();
}
// puttinychar
// Copy a 3x5 character glyph from the myfont data structure to display memory, with its upper left at the given coordinate
// This is unoptimized and simply uses plot() to draw each dot.
void puttinychar(byte x, byte y, char c)
{
byte dots;
if (c >= 'A' && c <= 'Z' || (c >= 'a' && c <= 'z') ) {
c &= 0x1F; // A-Z maps to 1-26
}
else if (c >= '0' && c <= '9') {
c = (c - '0') + 32;
}
else if (c == ' ') {
c = 0; // space
}
else if (c == '.') {
c = 27; // full stop
}
else if (c == ':') {
c = 28; // colon
}
else if (c == '\'') {
c = 29; // single quote mark
}
else if (c == '!') {
c = 30; // single quote mark
}
else if (c == '?') {
c = 31; // single quote mark
}
for (byte col = 0; col < 3; col++) {
dots = pgm_read_byte_near(&mytinyfont[c][col]);
for (char row = 0; row < 5; row++) {
if (dots & (16 >> row))
plot(x + col, y + row, 1);
else
plot(x + col, y + row, 0);
}
}
}
void putnormalchar(byte x, byte y, char c)
{
byte dots;
// if (c >= 'A' && c <= 'Z' || (c >= 'a' && c <= 'z') ) {
// c &= 0x1F; // A-Z maps to 1-26
// }
if (c >= 'A' && c <= 'Z' ) {
c &= 0x1F; // A-Z maps to 1-26
}
else if (c >= 'a' && c <= 'z') {
c = (c - 'a') + 41; // A-Z maps to 41-67
}
else if (c >= '0' && c <= '9') {
c = (c - '0') + 31;
}
else if (c == ' ') {
c = 0; // space
}
else if (c == '.') {
c = 27; // full stop
}
else if (c == '\'') {
c = 28; // single quote mark
}
else if (c == ':') {
c = 29; // clock_mode selector arrow
}
else if (c == '>') {
c = 30; // clock_mode selector arrow
}
else if (c >= -80 && c <= -67) {
c *= -1;
}
for (char col = 0; col < 5; col++) {
dots = pgm_read_byte_near(&myfont[c][col]);
for (char row = 0; row < 7; row++) {
//check coords are on screen before trying to plot
//if ((x >= 0) && (x <= 31) && (y >= 0) && (y <= 7)){
if (dots & (64 >> row)) { // only 7 rows.
plot(x + col, y + row, 1);
} else {
plot(x + col, y + row, 0);
}
//}
}
}
}
//small_mode
//show the time in small 3x5 characters with seconds display
void small_mode() {
char textchar[8]; // the 16 characters on the display
byte mins = 100; //mins
byte secs = rtc[0]; //seconds
byte old_secs = secs; //holds old seconds value - from last time seconds were updated o display - used to check if seconds have changed
cls();
//run clock main loop as long as run_mode returns true
while (run_mode()) {
get_time();
//check for button press
if (buttonA.uniquePress()) {
switch_mode();
return;
}
if (buttonB.uniquePress()) {
display_date();
return;
}
//if secs changed then update them on the display
secs = rtc[0];
if (secs != old_secs) {
//secs
char buffer[3];
itoa(secs, buffer, 10);
//fix - as otherwise if num has leading zero, e.g. "03" secs, itoa coverts this to chars with space "3 ".
if (secs < 10) {
buffer[1] = buffer[0];
buffer[0] = '0';
}
puttinychar( 20, 1, ':'); //seconds colon
puttinychar( 24, 1, buffer[0]); //seconds
puttinychar( 28, 1, buffer[1]); //seconds
old_secs = secs;
}
//if minute changes change time
if (mins != rtc[1]) {
//reset these for comparison next time
mins = rtc[1];
byte hours = rtc[2];
if (hours > 12) {
hours = hours - ampm * 12;
}
if (hours < 1) {
hours = hours + ampm * 12;
}
//byte dow = rtc[3]; // the DS1307 outputs 0 - 6 where 0 = Sunday0 - 6 where 0 = Sunday.
//byte date = rtc[4];
//set characters
char buffer[3];
itoa(hours, buffer, 10);
//fix - as otherwise if num has leading zero, e.g. "03" hours, itoa coverts this to chars with space "3 ".
if (hours < 10) {
buffer[1] = buffer[0];
//if we are in 12 hour mode blank the leading zero.
if (ampm) {
buffer[0] = ' ';
}
else {
buffer[0] = '0';
}
}
//set hours chars
textchar[0] = buffer[0];
textchar[1] = buffer[1];
textchar[2] = ':';
itoa (mins, buffer, 10);
if (mins < 10) {
buffer[1] = buffer[0];
buffer[0] = '0';
}
//set mins characters
textchar[3] = buffer[0];
textchar[4] = buffer[1];
//do seconds
textchar[5] = ':';
buffer[3];
secs = rtc[0];
itoa(secs, buffer, 10);
//fix - as otherwise if num has leading zero, e.g. "03" secs, itoa coverts this to chars with space "3 ".
if (secs < 10) {
buffer[1] = buffer[0];
buffer[0] = '0';
}
//set seconds
textchar[6] = buffer[0];
textchar[7] = buffer[1];
byte x = 0;
byte y = 0;
//print each char
for (byte x = 0; x < 6 ; x++) {
puttinychar( x * 4, 1, textchar[x]);
}
}
delay(50);
}
fade_down();
}
// basic_mode()
// show the time in 5x7 characters
void basic_mode()
{
cls();
char buffer[3]; //for int to char conversion to turn rtc values into chars we can print on screen
byte offset = 0; //used to offset the x postition of the digits and centre the display when we are in 12 hour mode and the clock shows only 3 digits. e.g. 3:21
byte x, y; //used to draw a clear box over the left hand "1" of the display when we roll from 12:59 -> 1:00am in 12 hour mode.
...
This file has been truncated, please download it to see its full contents.









{kind=link}
{kind=link}
Comments