#define BLYNK_PRINT Serial // Blynk
#include <ESP8266WiFi.h> // WIFI
#include <BlynkSimpleEsp8266.h>
#include<Servo.h> //Servo SG90
char auth[] = "483e2a27dc3b4fdcb5108b*******"; // token
char ssid[] = "J**** Sidh***"; // SSID WIFI
char pass[] = "190****"; // PASSWORD WIFI
Servo servo;
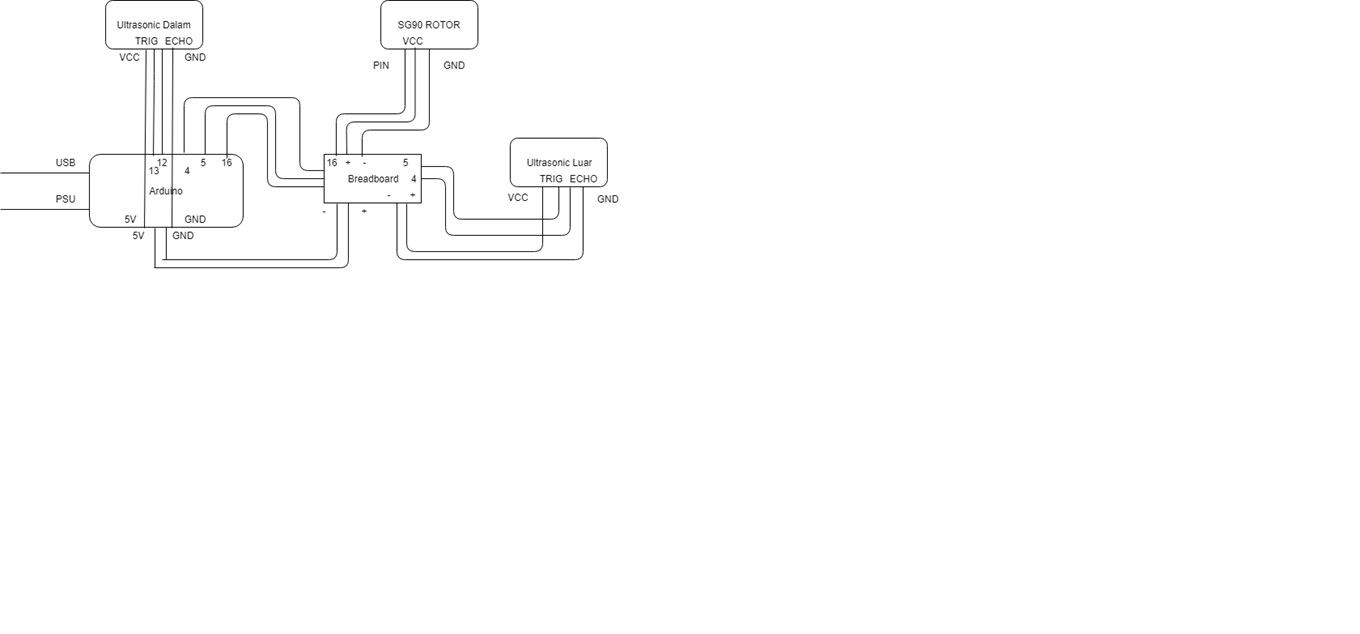
#define trigPin 13 //Ultrasonic1
#define echoPin 12 //Ultrasonic1
#define trigPin2 5 //Ultrasonic2
#define echoPin2 4 //Ultrasonic2
#define LED 2 //LED WIFI
#define BLYNK_MAX_SENDBYTES 256 //256 Bytes
void setup()
{
Serial.begin (9600);
pinMode(trigPin, OUTPUT); //Ultrasonic1
pinMode(echoPin, INPUT); //Ultrasonic1
pinMode(trigPin2, OUTPUT); //Ultrasonic2
pinMode(echoPin2, INPUT); //Ultrasonic2
pinMode(LED, OUTPUT); //LED
servo.attach(16); //Servo
Blynk.begin(auth, ssid, pass);
Blynk.email("josie**************@gmail.com", "TrashBin", "Online."); // Test Online Email Sent
Blynk.notify("Tong Sampah Sudah Online"); //Notify Trash Online
servo.write(210); // Starting Position Servo
}
void loop()
{
Blynk.run();
//Ultrasonic1
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
Blynk.virtualWrite(V1, distance); //Level
//Ultrasonic1
//Ultrasonic2
long duration2, distance2;
digitalWrite(trigPin2, LOW);
delayMicroseconds(2);
digitalWrite(trigPin2, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin2, LOW);
duration2 = pulseIn(echoPin2, HIGH);
distance2 = (duration2/2) / 29.1;
Blynk.virtualWrite(V2, distance2); //Level
//Ultrasonic2
// Open Automation
if (distance >= 30 || distance <= 0) //Condition when trash open and close automatically
{
Serial.println("Out of range");
servo.write(210); //menutup
if (distance2 >= 6 || distance2 <= 0) //Condition When Trash close reading full or not
{
Serial.print(distance2);
Serial.println(" cm2");
digitalWrite(LED, HIGH);
delay(500);
}
else
{
digitalWrite(LED, LOW);
delay(3000);
Serial.println("FULL");
Blynk.email("jo********@gmail.com", "Subject: TrashBin", "Full"); //if trash full will sending you email every 15minutes
Blynk.notify("Hey, Tong Sampah Penuh Segera Dikosongkan"); //Notify if trash full with blynk
}
}
else
{
Serial.print(distance);
Serial.println(" cm");
servo.write(60); //Open trash
delay(5000); //Delay open trash
}
delay(500); //Reading hands
}
//Open Automation
//Open Manually
BLYNK_WRITE(V3)
{
servo.write(param.asInt());//open
delay(5000);
}
BLYNK_WRITE(V5)
{
servo.write(param.asInt());
delay(5000);
}
//Open Manually








_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)









{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.