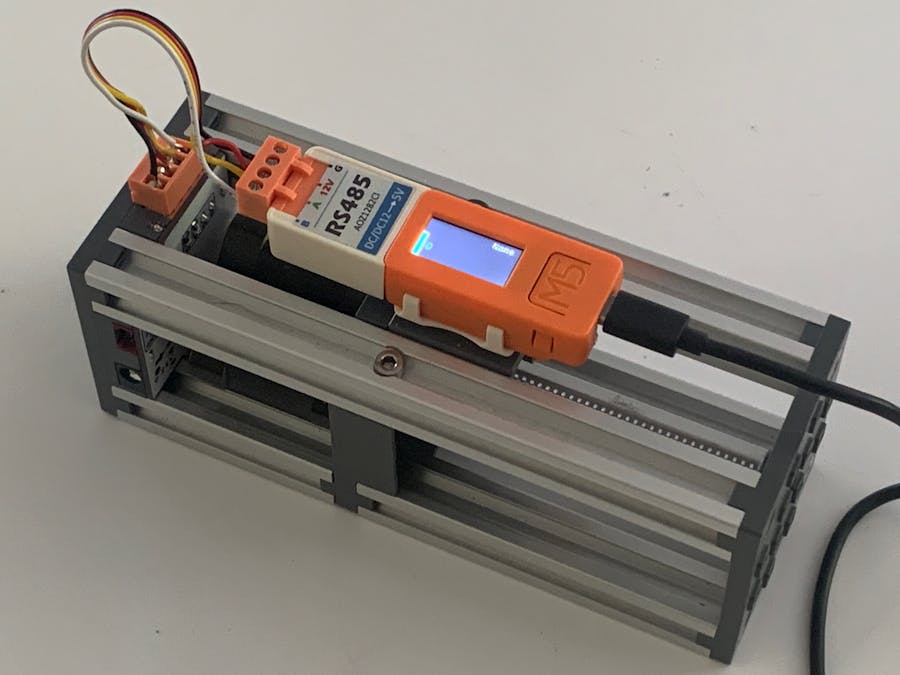
This project is simply an experiment to move the stepper on the 6060 push using rs485. It uses the accelerometer to check the tilt direction and moves the stepper accordingly.
UIFLOW CODE BLOCKS FOR STEPPER AND RS485 FEEDBACK
6060 push stepper with m5stickc and rs485 positional feedback from m5 stack import *from m5 ui import * from uiflow import * import imu setScreenColor(0 x111111 ) imu0 = imu.IMU() label1 = M5 TextBox(74 , 114 , "Text" , lcd.FONT_Default,0 xFFFFFF, rotate=90 ) rectangle0 = M5 Rect(0 , 0 , 50 , 10 , 0 xFFFFFF, 0 xFFFFFF) label0 = M5 TextBox(33 , 15 , "Text" , lcd.FONT_DejaVu24 ,0 xFFFFFF, rotate=90 ) name = None move = None message = None uart_val = None uart_int = None uart = None acc_dir = None pos = None prev_acc_dir = None out = None id_set = None checked_pos = None def get_serial_pos(name): global move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos message = ('ID' + ((name + 'P'))) uart.write(str(message)+"\r\n" ) uart_val = str((uart.readline())) wait_ms(20 ) uart_val = uart_val.replace("b'" , '') uart_val = uart_val.replace("\\r\\n'" , '') uart_val = uart_val.replace('ok', '') uart_val = uart_val.strip() label1 .setText(str(uart_val)) return uart_val def draw_screen(): global name, move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos label1 .hide() label0 .hide() label0 .setColor(0 x339999 ) label0 .setRotate(90 ) label0 .setFont(lcd.FONT_DejaVu18 ) label1 .setRotate(90 ) rectangle0 .setBgColor(0 x339999 ) rectangle0 .setSize(50 , 10 ) rectangle0 .setPosition(0 , pos) def check_id(): global name, move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos uart.write("ID" +"\r\n" ) wait_ms(150 ) def get_accel_dir(): global name, move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos acc_dir = imu0 .acceleration[1 ] if acc_dir > 0 .32 : pos = pos + 1 wait_ms(120 ) if pos >= 50 : pos = 50 if acc_dir < 0 .12 : pos = pos - 1 wait_ms(120 ) if pos <= 0 : pos = 0 label0 .setPosition(y=(15 + (pos * 3 ))) label0 .setText(str(pos)) rectangle0 .setSize(height=(10 + (pos * 3 ))) return pos def move_stepper(name, move): global message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos move = str(move) message = ('ID' + ((name + ':X'))) out = (message + move) uart.write(str(out)+"\r\n" ) wait_ms(20 ) def set_id(name): global move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos message = ('ID=' + name) uart.write(str(id_set)+"\r\n" ) wait_ms(150 ) def move_home(name): global move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos message = ('ID' + ((name + 'Z'))) uart.write(str(str(message))+"\r\n" ) label1 .setText('home') wait(3 ) uart_int = 0 pos = 0 prev_acc_dir = 0 uart = machine.UART(1 , tx=0 , rx=26 ) uart.init(9600 , bits=8 , parity=None, stop=1 ) name = '123 ' draw_screen() check_id() set_id(name) move_home(name) checked_pos = get_serial_pos(name) while True: acc_dir = get_accel_dir() checked_pos = get_serial_pos('123 ') if acc_dir != prev_acc_dir: move_stepper(name, acc_dir) prev_acc_dir = acc_dir wait_ms(2 ) 





Comments
Please log in or sign up to comment.