



This post may contain affiliate links to products we personally use and love.
IdeationWith fall around the corner, there was a local scarecrow festival coming up. Eileen and I check out their scarecrows every year, and always talk about making one when our son was old enough to understand and be excited about it. Well, this was the year to actually do. Even better, they had a new “Out of this World” category which was right up my alley. I love anything outer space related. So I put my thinking cap on to come up with an idea.
Then, as my son was singing nursery rhymes one day, inspiration struck when he got around to “Hey diddle diddle, the cat and the fiddle.”
I was going to make a robot cow titled “Moo-bot Over the Moon.”
Unlike your traditional scarecrow made from straw, I planned on ditching the straw in favor of sheet metal – a more robot friendly material. I also envisioned an interactive scarecrow. In all our years of visiting this competition, I’ve never saw a scarecrow that invited you to interact with it.
So, to make my robot really stand out, I wanted a button that people could press. The button would wake up the robot and he would start telling some cow related jokes. Who doesn’t like some good cow humor?
How to Make a Robot ScarecrowHere’s a video of Moo-bot in action. He’s an interactive cow that has blinking eyes, a moon that lights up, and plays through a reel of jokes every time the button is pressed.
Pretty cool, right? So here’s how to make a robot scarecrow. First, I started with the robot body, and then I housed the electrical components. After that I worked on the robot head and then I covered everything with sheet metal to make it weather-proof.
Next, I added some cow accessories, and then I mounted it to the post with a moon – completing the play on the nursery rhyme – “Moo-Bot Over the Moon.”
How to Make a Robot BodyTo start, I needed to come up with a design. After a few pencil and paper drawings, I relied on TinkerCAD to assist with the design.
Here is what I came up with (I made the body semi-transparent so you can see what the inside looks like): I designed Moo-Bot to be easy to transport. So it separates into three parts – the body, head and post. Each attaches to one another securely with a large bolt and wingnut.
First, I started working on the body. I constructed a frame using ¾” strips of wood cut from my table saw. I did use some 3.5” thick pieces for extra rigidity though. The body frame needed to be strong as it would house all the electronics. I connected all the pieces using construction adhesive and wood screws.
Here is a picture of the completed frame:
Constructing the MountAt the bottom middle of the frame was a mount to insert the post. The post would have a hole drilled into it. Once the post was inserted into the mount, a bolt would run through both of them, making a very secure connection.
Here is a closeup of the mount before I attached it to the body:
How to House the Electrical ComponentsWith the body done, I added in some of the internal electrical components as shown below:
The top left contained a removable board hosting some circuitry for the brains of our robot cow. The top right contains the speakers, and below are eight D sized batteries, split into two sections.
For the speakers, I MacGyvered the power adapter below:
The speakers supported four AA batteries, but I wanted to power it from eight D batteries. So I saw an area in the battery compartment to insert some wires, and secured them in place with some metal washers. I then drilled a small hole in the compartment lid for the wires to stick out.
To activate our robot cow, I added this on/off toggle switch:
Even though the switch was located inside our robot cow, it was positioned so I could access it from underneath.
The next part of Moo-Bot I tackled was the head. The design was really just one rectangular frame sitting perpendicular on top another identical frame. Here’s what the finished robot’s head looks like.
Similar to the body design, I made the frames from more strips of ¾” wood. I connected the pieces together with construction adhesive and my finishing nail gun.
Here’s a picture showing the individual frames:
Here are the frames assembled to form the iconic robot cow’s head:
I first did the sides of the head, as those were the easiest. Using some metal shears, I cut pieces out to match the outline of the side of the head. Then I clamped the pieces down and attached to the wooden frame with some screws.
Here is the first cut piece of sheet metal:
I had to be careful with the sharp edges and corners. Most of the time I wore thick gloves to protect my hands while cutting.
Occasionally, I would get slightly warped cut corners due to the shears pinching the metal. These warps and bumps needed to be flattened for a proper finish.
I found that my Kreg face clamp did an amazing job flattening uneven pieces of sheet metal, as seen below:
Making the Robot Weather-ProofFor the next pieces, I had to think carefully about which ones needed to be bent and overlap other pieces. This was a critical step in making a rainproof head.
All pieces of sheet metal cuts that left a crevice or opening for rain to run inside the head needed an overlapping sheet to divert the water. I was essentially wrapping the head in flashing.
The next cut of sheet metal was the face piece where the eyes were. This part needed some bending at the bottom to divert any rain water, as well as an eyehole cut.
Bend the Sheet MetalI used this nifty metal bending tool.
Here’s a picture showing the bent robot face piece:
After cutting the face piece, I worked on the eye holes. I etched an outline with my utility knife and cut a hole with my jigsaw (using metal cutting blades).
Unfortunately, I didn’t do such a great job cutting and the hole was a bit jagged. So I masked my mistakes by wrapping the cut edges with some black weatherproofing tape. It actually turned out to be a really nice visual touch.
Finished Face PieceIt sort of looks like a welding masking. It was perfect for a robot.
The next step of the process was adding accessories to our robot cow.
Finishing the Robot’s EyesFor the eyes, I first attached a piece of plexiglass inside the head. This would keep rain out. Next, I came up with this clever design for positioning the LED screens for the two eyes:
Here is a picture of the partially completed head, sitting next to the body:
Moo-Bot is really starting to take shape at this point.
Here is a picture of the mounting mechanism I used to secure the head to the body (you can also see my fancy ears made from springs and pipe straps):
Next, I attached the mouthpiece containing the interaction button.
Also, I wanted to add some sort of decoration representing nostrils.
I dug around the garage looking for inspiration when I came across some rubber washers. I think they were meant to be used in a hose. Regardless, they would be perfect for nostrils.
I stacked four of them together, and attached to the mousepiece with a regular metal washer for a cool robotic nostril effect.
Here’s the completed head capped off at the top:
Since I wanted the head to be easily detachable, I needed a quick way to disconnect/reconnect the wiring.
I really didn’t want to have to plug back in all the wires from the body to the head when I disconnected the head. So I came up with a clever custom made adapter, as seen below.
These adapters are actually for a computer power supply, but I repurposed them into cow robot adapters.
Here is a different view of the adapters:
The wires on the right plug straight into the body and the head. The cable on the left connects these two adapters. This setup allowed me to literally plug/unplug the head without the hassle of managing different wires and risk mangling my setup.
Next came the fun task of building the sheet metal enclosure for the body. The enclosure was essentially two boxes, joined at a slight 15 degree angle. Each box was made from a long strip of sheet metal, bent twice to form a U shape.
So first I had to cut the sheet metal to size. I didn’t want to use my metal shears because it would take too long, and I probably would not get too accurate of a cut.
So I used some scrap wood and clamped the sheet down to a table, and made the cut quickly with my jigsaw (using a metal blade).
Here is a picture showing my cutting station:
After the cuts were made, I re-used my cutting station to also perform the folds:
Here are the completed boxes:
Here I am assembling the boxes at the 15 degree angle:
I could have just left the robot cow with a straight body without the slight bend (and a lot easier to build too), but aesthetically it would have looked boring. Also, I wanted an intentional bend in the body to highlight the fact that Moo-Bot was jumping over the moon.
I connected the overlapping boxes with small nuts and bolts, as seen below:
When the two body segments were joined, I needed to do something about the ridge they created at the top.
If left this way, our DIY robot would be very vulnerable to rain seeping in. So I made a simple ridge cap and attached it, as seen at the top of the picture below:
I also reinforced the ridge with some weatherproofing tape underneath, just in case rain still managed to find its way in:
It was finally time to join the enclosure to the body frame. However, I had one remaining task to cut out a large hole in the back of the enclosure to serve as an access panel.
The hole would normally be covered by a rectangular cut piece of sheet metal, attached to the body frame with several screws. Then to gain access to Moo-Bot’s insides, it would just be a matter of removing those screws to take off the access panel covering.
Below is the access panel hole cut for the robot cow:
Here’s a picture showing the access panel covered (you’ll also notice that I added some wooden legs to help support our robot cow):
Here are some little feet I made for our robot cow scarecrow (springs would be inserted into the holes and attached to the wooden legs above).
Here’s a close-up of them dangling off the cow:
Eileen made some laminated decals for Moo-Bot’s cow spots. She drew them, printed them on our printer, and ran them through a laminator. The results were awesome, and would last in any weather. Here is the laminator at work:
Cutting and Reinforcing the Scarecrow PostFinally, it was time to work on the final piece – the scarecrow post. Per the competition’s instructions, the post had to be a 1 ½” square post. It also had to allow for about 18” of clearance at the bottom to be inserted into a metal stake secured into the ground.
So, I cut the post from a 2×4 piece of wood using my table saw. Next, I reinforced the scarecrow post with some metal bars.
The cow robot scarecrow was not that heavy, but I was worried that strong gusts of wind could snap the post. So metal reinforcement was essential, as seen below:
Constructing a Wooden MoonTo make the moon, I needed an 18” diameter wooden circle to attach to the post. I had a lot of plywood lying around, but I knew that the plywood edges would not fare well in the rain. So I needed to use solid boards.
Since boards didn’t come that large, I started with two 9”x18” boards as shown below:
Next, I joined them together with some pocket hole screws (using my Kreg pocket hole jig), forming a single 18”x18” square wood.
To form the circle, I simply used a 9” piece of wire, a pencil and a screw, as shown in the picture below.
I tied one end of the wire to the pencil and the other end to the screw.
Then while holding the screw down in the middle of the board, I ran the pencil around the board (with full extension of the wire), drawing a nearly perfect circle. Pretty nifty, right?
Next, I used my jigsaw to cut around the perimeter of the circle. Once the complete circle for the moon prop was cut out, I placed the piece in a large clamp to sand down the edges really smooth:
After I sanded, I dusted it off and spray painted it outside with an exterior off-white paint.
When the paint was dry the next day, I got some help attaching it to the post:
Finally, I wrapped some LED lights around the moon, and quickly fabricated an adapter to plug into the body.
This is similar to the adapters used for plugging in the head.
As a side note, the LED lights I used for the moon were self-powered with their own batteries. The Arduino simply turns them off and on.
So, I didn’t have to worry about these lights competing with Moo-Bot’s batteries.
Wiring Up the Inside of the Robot CowThe goal was to make the robot cow interactive. My thought was for Moo-Bot to play a friendly greeting when you pressed the button. After that, I compiled a series of cow-related jokes, such as the classic interrupting cow joke.
How did I get the robot to talk?
So, I had to include speakers for the sound and I decided to include two LED displays for the eyes. I got a little fancy and had the the moon light up too.
Since there would be no electrical outlet to plug into at the competition, our robot cow would also need to be battery powered and be capable of at least 2 months of continuous operation.
In order to do this, I made Moo-Bot’s brain a programmable Arduino microprocessor. This is just a simple device that made it easy for me to sync electronics up to a script. An Arduino would be perfect because it was really easy to use, very cheap to buy, and extremely conservative on power consumption.
Here’s a picture of the Arduino:
How to Use the Ardunio ProcessorUsing the Arduino is simple. You plug it into your computer with a USB cable.
Then, use the free Arduino IDE software to write a program and upload the code to the device. The Arduino has a number of ports you can plug things into. Some carry power to accessories, while others receive and transmit information.
For example, when someone presses the interaction button on our robot cow’s face, that button sends a signal to one of the Arduino’s receive ports. My code detects that signal and sends a message (through a transmit port) to a mini MP3 player, telling it to play some pre-recorded audio.
I also programmed the Arduino to go to sleep every 60 seconds of idleness. This was to conserve on battery power. The robot cow only wakes up when the interaction button is pressed, then goes to sleep if no one presses the button again within one minute.
Sleep mode cuts off power to the speakers and lights, and turns off a majority of processing on the Arduino. While in sleep mode, only minimal battery power is used to check when the interaction button is pressed.
Moo-Bot’s ScriptHere’s the exact script that Moo-Bot follows when woken up by the interaction button:
- Plays “whirring” startup MP3 and the eyes open
- Plays “introduction” MP3
- Waits for button to be pressed again
- On every button press, cycles through a number of pre-recorded MP3s telling cow jokes
- 30 seconds after no button press, plays, “Did you forget about me?” MP3
- 20 more seconds of no button press, plays “I am getting sleepy” MP3 and the eyes close
- 10 more seconds of still no button press, plays “goodbye” MP3 and Arduino goes to sleep
With the sleep logic in place, and powered by eight D sized batteries, I estimated our robot cow capable of lasting 3-6 months on battery, which was more than enough for the scarecrow competition.
The Robot’s CircuitryHere is a barebones prototype of our robot cow’s circuitry and code in action:
The Arduino is on the far right. On the left is a circuit breadboard, where I have a number of accessories plugged in. The breadboard allows you to quickly connect electrical components without the need for soldering. The Arduino also has a limited number of ports physically available, so I use the breadboard to expand those ports.
I plugged into the breadboard above is a mini MP3 player (with an external speaker plugged in), and I used two LED displays for the eyes.
My favorite part of Moo-Bot are the eyes. The eyes are animated, randomly blink, and open really wide when you press the interaction button. They added a nice touch of character to our robot cow.
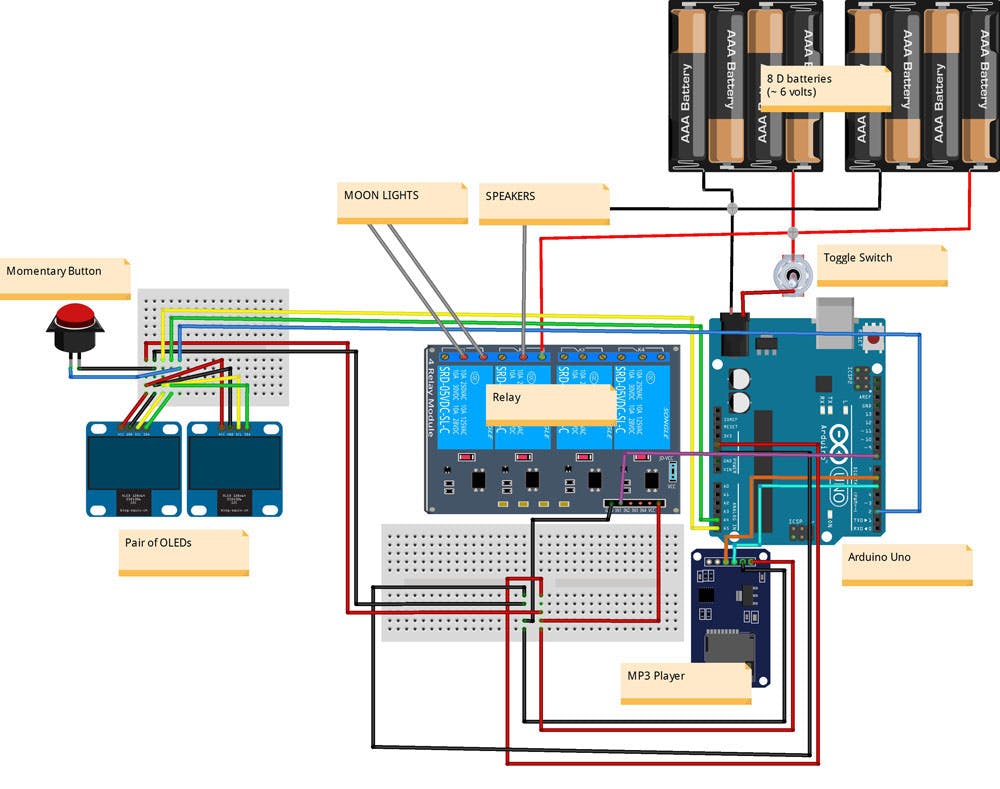
Here is a schematic of the complete circuit, if you are interested:
Finally, here is the electronic parts list if you are trying to make something similar yourself:
Entering the Robot Cow in the CompetitionThe day finally came when Moo-Bot had to say goodbye to my garage and join the rest of the scarecrows at the competition. We drove out there anxious to see our designated spot and to set up our robot cow.
I quickly got our robot cow setup (thanks to my modular plug and play design) and had him entertaining the crowd.
The robot cow scarecrow is all decked out in decals and fancy foot wear (below). Moo-Bot was a sure blast to work on and everyone misses him here at home. We plan on visiting him regularly to make sure he is still fully operational, and wish him the best of luck in his competition.
Good luck Moo-Bot!
Thank you! Now check your email to confirm your subscription.
There was an error submitting your subscription. Please try again.
Want to see more? Check out our similar projects:- How to Create Amazing Craft Room Storage
- How to Create Amazing Craft Room Storage
- Building a Shed from Scratch – Phase 2
- Building a Shed from Scratch – Phase 2
- Floor-To-Ceiling Bookshelf (With a Window Seat)
- Floor-To-Ceiling Bookshelf (With a Window Seat)



{kind=link}
Comments
Please log in or sign up to comment.