In the previous post. we connected an Arduino Uno and an Ethernet Shield. to the Aquabots Client. With this our autonomous vessel can register itself with a server application running in the cloud.
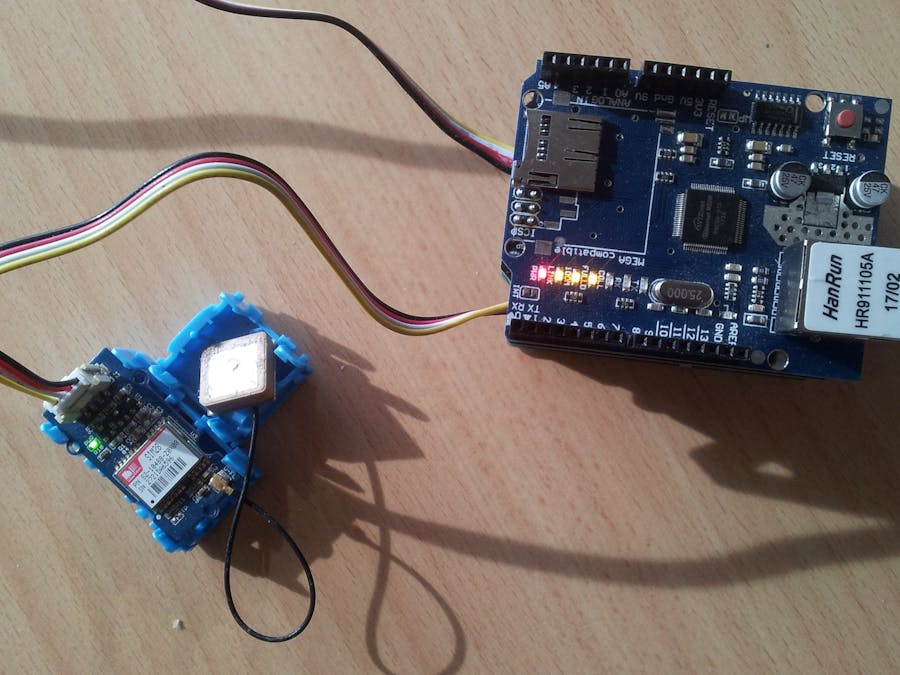
Today we are going to add a Grove GPS unit, so that the vessel can relay its location to the server. We will be using the TinyGPS++ library for this, together with the standard Arduino library SoftwareSerial, using pins 2 and 3 for Rx and Tx.
The required software is fairly standard to that of the tutorials, so implementing this should a piece of cake!
If you have connected the GPS unit to pins 2 and 3 of the Grove Base shield, then the Arduino will start to relay its position to the Aquabots Server once the GPS has made contact. If you log in, you can select the 'register vessel' option from the menu button. If you had alreay registered the vessel, then the OpenLayer map will jump to the location of the GPS unit.



_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



Comments
Please log in or sign up to comment.