

Hardware components | ||||||
| × | 1 | ||||
_baVEVgguW1.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
 |
| |||||
I'm an engineer and artist who enjoys projects that combine science and arts. I've been making dress designs with microcontrollers embedded within so that certain functionality of electronic components can be used to enhance the design theme. For this project, I want to use the pattern matching engine (PME) and the accelerometer inside Intel Curie on Arduino 101. Curie is made for PME applications as it has neural network capability but there hasn't been a lot of PME examples out there. I hope this example may inspire you to extract Curie's PME capability.
The dress uses a page of my graphic novel as the fabric. A scientist and her robot are looking into the telescope. As the wearer draws a pattern in the air, a set of LEDs arranged in the shape of constellations will shine in the night sky on the fabric.
Instructions*Note: after this project was published, I renovated the electronic circuit portion. An improved method to attach the LEDs to the cloth and how to make them durable is now published below after step 3.
** Update: wearing this dress for a few all-day demo events provided estimate of the battery life. To power this dress, the 9 V battery needs to be changed about every 3 hours. The battery does not get drained but it drops below 9 V, making it inefficient to do the pattern matching. You can save the battery for other uses.
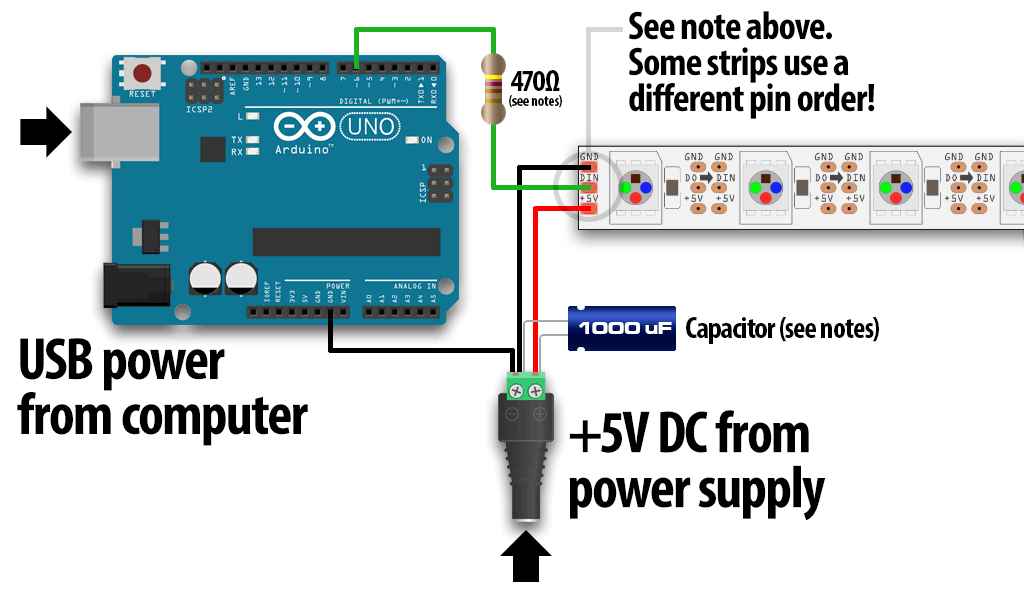
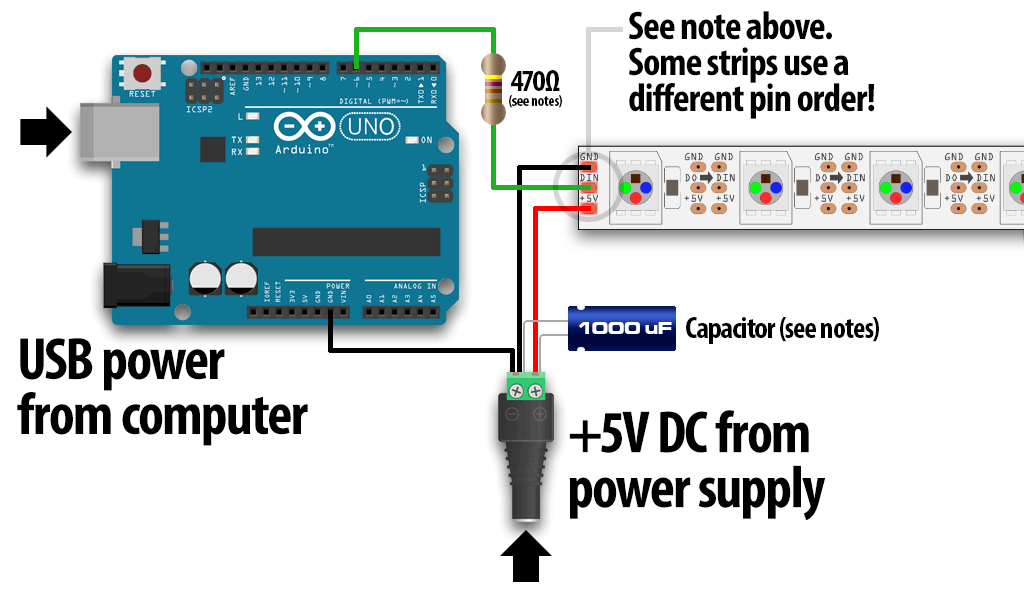
Step 1I used a NeoPixel strip from Adafruit, cut it up into pieces and arranged them into the shapes of constellations. Feel free to use other types of LEDs such as the individual RGB LEDs. Glue or sew them onto the base fabric.
Step 2Put an interfacing fabric on the top and you can outline the constellations. This step is optional but I found it helpful to have multiple layers of fabrics to strengthen the structure. I actually sewed another thick fabric onto the back of the base fabric. So three layers in total as the base, sandwiching the LEDs.
Step 3Solder the LEDs. If you use the sew-able individual LEDs, you can also use conductive threads to connect them. Either way, it's a lot of manual labor and requires patience. As I have four constellations (Orion, Big Dipper, Cygnus and Cassiopeia), I separated them into four traces. Each will be connected to a different Arduino 101 pin.
Improved stepsThe fabric I used for the above steps was too soft, which makes it easy to bend the LEDs and wires, breaking the soldering joints. I re-did the whole process with the following improved method.
Position the LEDsI used a NeoPixel strip from Adafruit and cut it up into pieces and arranged them into the shapes of constellations. Feel free to use other types of LEDs such as the individual RGB LEDs. Glue or sew them onto the base fabric.
Felt is a nice type of thick fabric that gives structure and works well with hot glue. Arrange the LEDs into respective positions so that when they light up, their positions reflect stars in constellations.
Plan the LEDs and WiresGlue the LED stripes onto felt at a few points. Do not put glue under the whole strip because you need some leeway to slide heat-shrink tubes around, as shown in the figure. Cut stranded wires into the right lengths and place them onto their relative positions on the same piece of felt. I would recommend not to hot glue the wires just yet. My figure here is a blunder in that respect. Rather, it is better to hold the wires in their positions with temporary tape so that when you solder the wires to the LEDs, the wire positions can be adjusted.
Make All Pieces Ready to SewThe figure shows that I prepared four constellations (Orion, Big Dipper, Cygnus and Cassiopeia) onto four separate pieces. After soldering and heat-shrink around the soldered joints, you can glue everything tightly onto the felt.
Test!Test your circuit before going further! Can just do a NeoPixel Strandtest for each trace.
Okay, I put the level as "Easy" since scientifically it's not hard once you understand the code, but it does take a lot of work stabilizing the cables on the fabric.
Make sure that your Arduino IDE is the latest version and has Curie PME library. I'd recommend using the Arduino Web Editor. Download the library here.
In parallel (figuratively), make the dress. After you test the circuit, sew the base fabrics with the LEDs onto the inside of the dress. LEDs will shine through the graphics.
As you can see, the Arduino 101 is in my hand. I made a 3D printed case for the Arduino 101 and battery. There are long wires connecting the LEDs and the board, which are hidden in the sleeve.
The code below will give you information on how the board is programmed. After you flash the code, train the neurons first so they learn which patterns are there. Watch this video at ~0:30:
For more photos and other tech-fashion/paintings-on-fabric designs, check out my website :)
NeoPixel LEDs
I plugged the 9 V battery directly into the barrel jack.
PME_4LED_new.ino
Arduino/*
* This example demonstrates using the pattern matching engine (CuriePME)
* to classify streams of accelerometer data from CurieIMU.
*
* First, the sketch will prompt you to draw some letters in the air (just
* imagine you are writing on an invisible whiteboard, using your board as the
* pen), and the IMU data from these motions is used as training data for the
* PME. Once training is finished, you can keep drawing letters and the PME
* will try to guess which letter you are drawing.
*
* This example requires a button to be connected to digital pin 4
* https://www.arduino.cc/en/Tutorial/Button
*
* NOTE: For best results, draw big letters, at least 1-2 feet tall.
*
* Copyright (c) 2016 Intel Corporation. All rights reserved.
* See license notice at end of file.
*/
#include "CurieIMU.h"
#include "CuriePME.h"
#include <CurieSerialFlash.h>
#include <SPI.h>
#include <Adafruit_NeoPixel.h>
#define PINM 6 //// what pin are the NeoPixels connected to?
#define PINC 3
#define PINS 9
#define PINO 5
Adafruit_NeoPixel stripM = Adafruit_NeoPixel(10, PINM, NEO_GRB + NEO_KHZ800); /// the strip is 15 pixels long. You can change this for the number of pixels in your individual strip.
Adafruit_NeoPixel stripS = Adafruit_NeoPixel(10, PINS, NEO_GRB + NEO_KHZ800);
Adafruit_NeoPixel stripC = Adafruit_NeoPixel(10, PINC, NEO_GRB + NEO_KHZ800);
Adafruit_NeoPixel stripO = Adafruit_NeoPixel(10, PINO, NEO_GRB + NEO_KHZ800);
int tr = 0; //Some variables to hold "color-target" and "color-current" for smoothing...
int tg = 0;
int tb = 0;
int r = 0;
int g = 0;
int b = 0;
int rawX = 0; ///// to hold values from the Curie's accelerometer
int rawY = 0;
//int rawZ = 0;
float angle = 0.0;
/* This controls how many times a letter must be drawn during training.
* Any higher than 4, and you may not have enough neurons for all 26 letters
* of the alphabet. Lower than 4 means less work for you to train a letter,
* but the PME may have a harder time classifying that letter. */
const unsigned int trainingReps = 4;
/* Increase this to 'A-Z' if you like-- it just takes a lot longer to train */
const unsigned char trainingStart = 'A';
const unsigned char trainingEnd = 'D';
/* The input pin used to signal when a letter is being drawn- you'll
* need to make sure a button is attached to this pin */
const unsigned int buttonPin = 4;
/* Sample rate for accelerometer */
const unsigned int sampleRateHZ = 200;
/* No. of bytes that one neuron can hold */
const unsigned int vectorNumBytes = 128;
/* Number of processed samples (1 sample == accel x, y, z)
* that can fit inside a neuron */
const unsigned int samplesPerVector = (vectorNumBytes / 3);
/* This value is used to convert ASCII characters A-Z
* into decimal values 1-26, and back again. */
const unsigned int upperStart = 0x40;
const unsigned int sensorBufSize = 2048;
const int IMULow = -32768;
const int IMUHigh = 32767;
const char *filename = "NeurDataDress.dat";
void setup()
{
Serial.begin(9600);
//while(!Serial);
pinMode(buttonPin, INPUT);
/* Start the IMU (Intertial Measurement Unit) */
CurieIMU.begin();
/* Start the PME (Pattern Matching Engine) */
CuriePME.begin();
CurieIMU.setAccelerometerRate(sampleRateHZ);
CurieIMU.setAccelerometerRange(2);
/* Init. SPI Flash chip */
if (!SerialFlash.begin(ONBOARD_FLASH_SPI_PORT, ONBOARD_FLASH_CS_PIN)) {
Serial.println("Unable to access SPI Flash chip");
}
stripM.begin(); // intialize neopixel strip
stripS.begin();
stripC.begin();
stripO.begin();
stripM.show(); // Initialize all pixels to 'off'
stripS.show();
stripC.show();
stripO.show();
solidM(stripM.Color(255, 0, 0), 50); //Red for ready for input
}
/* This function reads the file saved by the previous example
* The file contains all the data that was learned, then saved before.
* Once the network is restored, it is able to classify patterns again without
* having to be retrained.*/
void restoreNetworkKnowledge ( void )
{
SerialFlashFile file;
int32_t fileNeuronCount = 0;
Intel_PMT::neuronData neuronData;
// Open the file and write test data
file = SerialFlash.open(filename);
CuriePME.beginRestoreMode();
if (file) {
// iterate over the network and save the data.
while(1) {
Serial.print("Reading Neuron: ");
uint16_t neuronFields[4];
file.read( (void*) neuronFields, 8);
file.read( (void*) neuronData.vector, 128 );
neuronData.context = neuronFields[0] ;
neuronData.influence = neuronFields[1] ;
neuronData.minInfluence = neuronFields[2] ;
neuronData.category = neuronFields[3];
if (neuronFields[0] == 0 || neuronFields[0] > 127)
break;
fileNeuronCount++;
// this part just prints each neuron as it is restored,
// so you can see what is happening.
Serial.print(fileNeuronCount);
Serial.print("\n");
Serial.print( neuronFields[0] );
Serial.print( "\t");
Serial.print( neuronFields[1] );
Serial.print( "\t");
Serial.print( neuronFields[2] );
Serial.print( "\t");
Serial.print( neuronFields[3] );
Serial.print( "\t");
Serial.print( neuronData.vector[0] );
Serial.print( "\t");
Serial.print( neuronData.vector[1] );
Serial.print( "\t");
Serial.print( neuronData.vector[2] );
Serial.print( "\n");
CuriePME.iterateNeuronsToRestore( neuronData );
}
}
CuriePME.endRestoreMode();
Serial.print("Knowledge Set Restored. \n");
}
boolean longPress=false;
int startTime=0;
int lastOrientation = - 1; // previous orientation (for comparison)
int lastReading = -1;
boolean lastPress=false;
void loop ()
{
int orientation = - 1; // the board's orientation
String orientationString; // string for printing description of orientation
// The orientations of the board:
// 0: flat, processor facing up
// 1: flat, processor facing down
// 2: landscape, analog pins down
// 3: landscape, analog pins up
// 4: portrait, USB connector up
// 5: portrait, USB connector down
// read accelerometer:
int x = CurieIMU.readAccelerometer(X_AXIS);
int y = CurieIMU.readAccelerometer(Y_AXIS);
int z = CurieIMU.readAccelerometer(Z_AXIS);
// calculate the absolute values, to determine the largest
int absX = abs(x);
int absY = abs(y);
int absZ = abs(z);
if ( (absZ > absX) && (absZ > absY)) {
// base orientation on Z
if (z > 0) {
orientationString = "up";
orientation = 0;
} else {
orientationString = "down";
orientation = 1;
}
} else if ( (absY > absX) && (absY > absZ)) {
// base orientation on Y
if (y > 0) {
orientationString = "digital pins up";
orientation = 2;
} else {
orientationString = "analog pins up";
orientation = 3;
}
} else {
// base orientation on X
if (x < 0) {
orientationString = "connector up";
orientation = 4;
} else {
orientationString = "connector down";
orientation = 5;
}
}
// if the orientation has changed, print out a description:
if (orientation != lastOrientation) {
Serial.println(orientationString);
lastOrientation = orientation;
}
// if the orientation has changed, print out a description:
if (orientation != lastOrientation) {
lastOrientation = orientation;
}
int reading = digitalRead(buttonPin);
if (lastReading != reading) {
Serial.print("buttonPin=");
Serial.println(reading);
lastReading = reading;
}
if (reading == HIGH) {
if (startTime == 0) {
startTime=millis();
} else if ((millis() - startTime) >2000) {
longPress=true;
if (!lastPress) {
Serial.println("longPress");
//green for long press
solidM(stripM.Color(0, 255, 0), 50);// Green
lastPress=true;
}
}
}
if ( reading == LOW && longPress ) {
blackout(5);
Serial.print("orientation=");
Serial.print(orientation);
Serial.print(" SerialFlash.exists(filename)=");
Serial.println(SerialFlash.exists(filename));
if (orientation!=4 && SerialFlash.exists(filename)) {
restoreNetworkKnowledge();
Serial.print("Training restored.");
} else {
trainLetters();
blackout(5);
Serial.print("Training complete.");
}
Serial.println(" Now, draw some letters (remember to ");
Serial.println("hold the button) and see if the PME can classify them.");
solidM(stripM.Color(0, 0, 255), 500); //Blue for ready for matching
blackout(5);
//turn off for matching
while (true) {
match();
}
}
}
void solidM(uint32_t c, uint8_t wait) {
for (uint16_t i=0; i < stripM.numPixels(); i++) {
stripM.setPixelColor(i, c); //turn every pixel off
}
stripM.show();
delay(wait);
}
void blackout(uint8_t wait) {
for (uint16_t i=0; i < stripM.numPixels(); i++) {
stripM.setPixelColor(i, 0); //turn every pixel off
}
for (uint16_t i=0; i < stripS.numPixels(); i++) {
stripS.setPixelColor(i, 0); //turn every pixel off
}
for (uint16_t i=0; i < stripC.numPixels(); i++) {
stripC.setPixelColor(i, 0); //turn every pixel off
}
for (uint16_t i=0; i < stripO.numPixels(); i++) {
stripO.setPixelColor(i, 0); //turn every pixel off
}
stripM.show();
stripS.show();
stripC.show();
stripO.show();
delay(wait);
}
void match()
{
byte vector[vectorNumBytes];
unsigned int category;
char letter;
char pattern;
/* Record IMU data while button is being held, and
* convert it to a suitable vector */
readVectorFromIMU(vector);
/* Use the PME to classify the vector, i.e. return a category
* from 1-26, representing a letter from A-Z */
category = CuriePME.classify(vector, vectorNumBytes);
if (category == CuriePME.noMatch) {
Serial.println("Don't recognise that one-- try again.");
//theaterChase();
theaterChaseM(stripM.Color(127, 127, 127), 50);
theaterChaseS(stripS.Color(127, 127, 127), 50);
theaterChaseC(stripC.Color(127, 127, 127), 50);
theaterChaseO(stripO.Color(127, 127, 127), 50);// White
stripM.show();
stripS.show();
stripC.show();
stripO.show();
blackout(1);
// delay(10);
} else {
letter = category + upperStart;
pattern = letter;
if ( pattern == 'A' ) {
//red
colorWipeM(stripM.Color(0, 255, 0), 50); // Green
theaterChaseM(stripM.Color(127, 127, 127), 50); // White
stripM.show();
} else if ( pattern == 'B') {
colorWipeS(stripS.Color(255, 0, 0), 50); // Red
theaterChaseS(stripS.Color(127, 127, 127), 50); // White
stripS.show();
} else if ( pattern == 'C') {
colorWipeC(stripC.Color(0, 0, 255), 50); // Blue
theaterChaseC(stripC.Color(127, 127, 127), 50); // White
stripC.show();
} else if ( pattern == 'D') {
colorWipeO(stripO.Color(255, 0, 255), 50); // Blue
theaterChaseO(stripO.Color(127, 127, 127), 50); // White
stripO.show();
}
Serial.println(letter);
}
}
/* Simple "moving average" filter, removes low noise and other small
* anomalies, with the effect of smoothing out the data stream. */
byte getAverageSample(byte samples[], unsigned int num, unsigned int pos,
unsigned int step)
{
unsigned int ret;
unsigned int size = step * 2;
if (pos < (step * 3) || pos > (num * 3) - (step * 3)) {
ret = samples[pos];
} else {
ret = 0;
pos -= (step * 3);
for (unsigned int i = 0; i < size; ++i) {
ret += samples[pos - (3 * i)];
}
ret /= size;
}
return (byte)ret;
}
/* We need to compress the stream of raw accelerometer data into 128 bytes, so
* it will fit into a neuron, while preserving as much of the original pattern
* as possible. Assuming there will typically be 1-2 seconds worth of
* accelerometer data at 200Hz, we will need to throw away over 90% of it to
* meet that goal!
*
* This is done in 2 ways:
*
* 1. Each sample consists of 3 signed 16-bit values (one each for X, Y and Z).
* Map each 16 bit value to a range of 0-255 and pack it into a byte,
* cutting sample size in half.
*
* 2. Undersample. If we are sampling at 200Hz and the button is held for 1.2
* seconds, then we'll have ~240 samples. Since we know now that each
* sample, once compressed, will occupy 3 of our neuron's 128 bytes
* (see #1), then we know we can only fit 42 of those 240 samples into a
* single neuron (128 / 3 = 42.666). So if we take (for example) every 5th
* sample until we have 42, then we should cover most of the sample window
* and have some semblance of the original pattern. */
void undersample(byte samples[], int numSamples, byte vector[])
{
unsigned int vi = 0;
unsigned int si = 0;
unsigned int step = numSamples / samplesPerVector;
unsigned int remainder = numSamples - (step * samplesPerVector);
/* Centre sample window */
samples += (remainder / 2) * 3;
for (unsigned int i = 0; i < samplesPerVector; ++i) {
for (unsigned int j = 0; j < 3; ++j) {
vector[vi + j] = getAverageSample(samples, numSamples, si + j, step);
}
si += (step * 3);
vi += 3;
}
}
void readVectorFromIMU(byte vector[])
{
byte accel[sensorBufSize];
int raw[3];
unsigned int samples = 0;
unsigned int i = 0;
/* Wait until button is pressed */
while (digitalRead(buttonPin) == LOW);
/* While button is being held... */
while (digitalRead(buttonPin) == HIGH) {
if (CurieIMU.dataReady()) {
CurieIMU.readAccelerometer(raw[0], raw[1], raw[2]);
/* Map raw values to 0-255 */
accel[i] = (byte) map(raw[0], IMULow, IMUHigh, 0, 255);
accel[i + 1] = (byte) map(raw[1], IMULow, IMUHigh, 0, 255);
accel[i + 2] = (byte) map(raw[2], IMULow, IMUHigh, 0, 255);
i += 3;
++samples;
/* If there's not enough room left in the buffers
* for the next read, then we're done */
if (i + 3 > sensorBufSize) {
break;
}
}
}
undersample(accel, samples, vector);
}
void trainLetter(char letter, unsigned int repeat)
{
unsigned int i = 0;
while (i < repeat) {
byte vector[vectorNumBytes];
if ( letter == 'A' ) {
colorWipeM(stripM.Color(0, 255, 0), 50); // Green
theaterChaseM(stripM.Color(127, 127, 127), 50); // White
stripM.show();
} else if ( letter == 'B') {
colorWipeS(stripS.Color(255, 0, 0), 50); // Red
theaterChaseS(stripS.Color(127, 127, 127), 50); // White
stripS.show();
} else if ( letter == 'C') {
colorWipeC(stripC.Color(0, 0, 255), 50); // Blue
theaterChaseC(stripC.Color(127, 127, 127), 50); // White
stripC.show();
} else if ( letter == 'D') {
colorWipeO(stripO.Color(255, 0, 255), 50); // Blue
theaterChaseO(stripO.Color(127, 127, 127), 50); // White
stripO.show();
}
if (i) Serial.println("And again...");
readVectorFromIMU(vector);
CuriePME.learn(vector, vectorNumBytes, letter - upperStart);
Serial.println("Got it!");
delay(1000);
++i;
}
}
bool create_if_not_exists (const char *filename, uint32_t fileSize) {
if (!SerialFlash.exists(filename)) {
Serial.println("Creating file " + String(filename));
return SerialFlash.createErasable(filename, fileSize);
}
Serial.println("File " + String(filename) + " already exists");
return true;
}
void saveNetworkKnowledge ( void )
{
// const char *filename = "NeurData.dat";
SerialFlashFile file;
Intel_PMT::neuronData neuronData;
uint32_t fileSize = 128 * sizeof(neuronData);
Serial.print( "File Size to save is = ");
Serial.print( fileSize );
Serial.print("\n");
create_if_not_exists( filename, fileSize );
// Open the file and write test data
file = SerialFlash.open(filename);
file.erase();
CuriePME.beginSaveMode();
if (file) {
// iterate over the network and save the data.
while( uint16_t nCount = CuriePME.iterateNeuronsToSave(neuronData)) {
if( nCount == 0x7FFF)
break;
Serial.print("Saving Neuron: ");
Serial.print(nCount);
Serial.print("\n");
uint16_t neuronFields[4];
neuronFields[0] = neuronData.context;
neuronFields[1] = neuronData.influence;
neuronFields[2] = neuronData.minInfluence;
neuronFields[3] = neuronData.category;
file.write( (void*) neuronFields, 8);
file.write( (void*) neuronData.vector, 128 );
}
}
CuriePME.endSaveMode();
Serial.print("Knowledge Set Saved. \n");
}
void trainLetters()
{
for (char i = trainingStart; i <= trainingEnd; ++i) {
Serial.print("Hold down the button and draw the letter '");
Serial.print(String(i) + "' in the air. Release the button as soon ");
Serial.println("as you are done.");
trainLetter(i, trainingReps);
Serial.println("OK, finished with this letter.");
delay(2000);
}
// Init. SPI Flash chip
if (!SerialFlash.begin(ONBOARD_FLASH_SPI_PORT, ONBOARD_FLASH_CS_PIN)) {
Serial.println("Unable to access SPI Flash chip");
}
saveNetworkKnowledge();
}
/*Special light functions from Adafruit Strandtest Example Code
* Input a value 0 to 255 to get a color value. Used for rainbow effect above.
* Theater Chase lights from Adafruit strandtest example code. This takes whatever the curent RGB value is, and does a "theatre chase" effect with it.
*/
/*Theatre-style crawling lights.*/
void theaterChasePIN(uint8_t p,uint32_t c, uint8_t wait) {
Adafruit_NeoPixel strip = Adafruit_NeoPixel(10, p, NEO_GRB + NEO_KHZ800);
for (int j=0; j<10; j++) { //do 10 cycles of chasing
for (int q=0; q < 3; q++) {
for (uint16_t i=0; i < strip.numPixels(); i=i+3) {
strip.setPixelColor(i+q, c); //turn every third pixel on
}
strip.show();
delay(wait);
for (uint16_t i=0; i < strip.numPixels(); i=i+3) {
strip.setPixelColor(i+q, 0); //turn every third pixel off
}
}
}
}
/* Fill the dots one after the other with a color*/
void colorWipePIN(uint8_t p, uint32_t c, uint8_t wait) {
Adafruit_NeoPixel strip = Adafruit_NeoPixel(10, p, NEO_GRB + NEO_KHZ800);
for(uint16_t i=0; i<strip.numPixels(); i++) {
strip.setPixelColor(i, c);
strip.show();
delay(wait);
}
}
/*Special light functions from Adafruit Strandtest Example Code
* Input a value 0 to 255 to get a color value. Used for rainbow effect above.
* Theater Chase lights from Adafruit strandtest example code. This takes whatever the curent RGB value is, and does a "theatre chase" effect with it.
*/
void theaterChaseM(uint32_t c, uint8_t wait) {
for (int j=0; j<10; j++) { //do 10 cycles of chasing
for (int q=0; q < 3; q++) {
for (uint16_t i=0; i < stripM.numPixels(); i=i+3) {
stripM.setPixelColor(i+q, c); //turn every third pixel on
}
stripM.show();
delay(wait);
for (uint16_t i=0; i < stripM.numPixels(); i=i+3) {
stripM.setPixelColor(i+q, 0); //turn every third pixel off
}
}
}
}
/* Theatre-style crawling lights. */
void theaterChaseS(uint32_t c, uint8_t wait) {
for (int j=0; j<10; j++) { //do 10 cycles of chasing
for (int q=0; q < 3; q++) {
for (uint16_t i=0; i < stripS.numPixels(); i=i+3) {
stripS.setPixelColor(i+q, c); //turn every third pixel on
}
stripS.show();
delay(wait);
for (uint16_t i=0; i < stripS.numPixels(); i=i+3) {
stripS.setPixelColor(i+q, 0); //turn every third pixel off
}
}
}
}
/*Theatre-style crawling lights.*/
void theaterChaseC(uint32_t c, uint8_t wait) {
for (int j=0; j<10; j++) { //do 10 cycles of chasing
for (int q=0; q < 3; q++) {
for (uint16_t i=0; i < stripC.numPixels(); i=i+3) {
stripC.setPixelColor(i+q, c); //turn every third pixel on
}
stripC.show();
delay(wait);
for (uint16_t i=0; i < stripC.numPixels(); i=i+3) {
stripC.setPixelColor(i+q, 0); //turn every third pixel off
}
}
}
}
/*Theatre-style crawling lights.*/
void theaterChaseO(uint32_t c, uint8_t wait) {
for (int j=0; j<10; j++) { //do 10 cycles of chasing
for (int q=0; q < 3; q++) {
for (uint16_t i=0; i < stripO.numPixels(); i=i+3) {
stripO.setPixelColor(i+q, c); //turn every third pixel on
}
stripO.show();
delay(wait);
for (uint16_t i=0; i < stripO.numPixels(); i=i+3) {
stripO.setPixelColor(i+q, 0); //turn every third pixel off
}
}
}
}
/* Fill the dots one after the other with a color*/
void colorWipeM(uint32_t c, uint8_t wait) {
for(uint16_t i=0; i<stripM.numPixels(); i++) {
stripM.setPixelColor(i, c);
stripM.show();
delay(wait);
}
}
/* Fill the dots one after the other with a color*/
void colorWipeS(uint32_t c, uint8_t wait) {
for(uint16_t i=0; i<stripS.numPixels(); i++) {
stripS.setPixelColor(i, c);
stripS.show();
delay(wait);
}
}
/* Fill the dots one after the other with a color*/
void colorWipeC(uint32_t c, uint8_t wait) {
for(uint16_t i=0; i<stripC.numPixels(); i++) {
stripC.setPixelColor(i, c);
stripC.show();
delay(wait);
}
}
/* Fill the dots one after the other with a color*/
void colorWipeO(uint32_t c, uint8_t wait) {
for(uint16_t i=0; i<stripO.numPixels(); i++) {
stripO.setPixelColor(i, c);
stripO.show();
delay(wait);
}
}
/*
* This library is free software; you can redistribute it and/or
* modify it under the terms of the GNU Lesser General Public
* License as published by the Free Software Foundation; either
* version 2.1 of the License, or (at your option) any later version.
*
* This library is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
* Lesser General Public License for more details.
*
* You should have received a copy of the GNU Lesser General Public
* License along with this library; if not, write to the Free Software
* Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA
*/
PME_LED
Arduino/*
* This example demonstrates using the pattern matching engine (CuriePME)
* to classify streams of accelerometer data from CurieIMU.The code is a modification of the Draw in the Air example:
* https://github.com/01org/Intel-Pattern-Matching-Technology
*
* First, the sketch will prompt you to draw patterns in the air (just
* imagine you are writing on an invisible whiteboard, using your board as the
* pen), and the IMU data from these motions is used as training data for the
* PME. Once training is finished, you can keep drawing letters and the PME
* will try to guess which letter you are drawing.
*
* This example requires a button to be connected to digital pin 4
* https://www.arduino.cc/en/Tutorial/Button
*
* NOTE: For best results, draw big letters, at least 1-2 feet tall.
*
* Copyright (c) 2016 Intel Corporation. All rights reserved.
* See license notice at end of file.
*/
#include "CurieIMU.h"
#include "CuriePME.h"
#include <Adafruit_NeoPixel.h>
#define PIN 6 //// what pin are the NeoPixels connected to?
Adafruit_NeoPixel strip = Adafruit_NeoPixel(54, PIN, NEO_GRB + NEO_KHZ800); /// the strip is 15 pixels long. You can change this for the number of pixels in your individual strip.
int tr = 0; //Some variables to hold "color-target" and "color-current" for smoothing...
int tg = 0;
int tb = 0;
int r = 0;
int g = 0;
int b = 0;
int rawX = 0; ///// to hold values from the Curie's accelerometer
int rawY = 0;
//int rawZ = 0;
float angle = 0.0;
/* This controls how many times a letter must be drawn during training.
* Any higher than 4, and you may not have enough neurons for all 26 letters
* of the alphabet. Lower than 4 means less work for you to train a letter,
* but the PME may have a harder time classifying that letter. */
const unsigned int trainingReps = 4;
/* Increase this to 'A-Z' if you like-- it just takes a lot longer to train */
const unsigned char trainingStart = 'A';
const unsigned char trainingEnd = 'D';
/* The input pin used to signal when a letter is being drawn- you'll
* need to make sure a button is attached to this pin */
const unsigned int buttonPin = 4;
/* Sample rate for accelerometer */
const unsigned int sampleRateHZ = 200;
/* No. of bytes that one neuron can hold */
const unsigned int vectorNumBytes = 128;
/* Number of processed samples (1 sample == accel x, y, z)
* that can fit inside a neuron */
const unsigned int samplesPerVector = (vectorNumBytes / 3);
/* This value is used to convert ASCII characters A-Z
* into decimal values 1-26, and back again. */
const unsigned int upperStart = 0x40;
const unsigned int sensorBufSize = 2048;
const int IMULow = -32768;
const int IMUHigh = 32767;
void setup()
{
Serial.begin(9600);
// while(!Serial);
pinMode(buttonPin, INPUT);
/* Start the IMU (Intertial Measurement Unit) */
CurieIMU.begin();
/* Start the PME (Pattern Matching Engine) */
CuriePME.begin();
CurieIMU.setAccelerometerRate(sampleRateHZ);
CurieIMU.setAccelerometerRange(2);
trainLetters();
//Serial.println("Training complete. Now, draw some letters (remember to ");
// Serial.println("hold the button) and see if the PME can classify them.");
strip.begin(); // intialize neopixel strip
strip.show(); // Initialize all pixels to 'off'
}
void loop ()
{
/// these functions are written out at the bottom of the sketch.
Serial.println("Training complete. Now, draw some letters (remember to ");
Serial.println("hold the button) and see if the PME can classify them.");
byte vector[vectorNumBytes];
unsigned int category;
char letter;
char pattern;
/* Record IMU data while button is being held, and
* convert it to a suitable vector */
readVectorFromIMU(vector);
/* Use the PME to classify the vector, i.e. return a category
* from 1-26, representing a letter from A-Z */
category = CuriePME.classify(vector, vectorNumBytes);
if (category == CuriePME.noMatch) {
Serial.println("Don't recognise that one-- try again.");
//theaterChase();
theaterChase(strip.Color(127, 127, 127), 50); // White
strip.show();
// delay(10);
} else {
letter = category + upperStart;
pattern = letter;
if ( pattern == 'A' ) {
//red
colorWipe(strip.Color(0, 255, 0), 50); // Green
theaterChase(strip.Color(127, 127, 127), 50); // White
strip.show();
} else if ( pattern == 'B') {
colorWipe(strip.Color(255, 0, 0), 50); // Red
theaterChase(strip.Color(127, 127, 127), 50); // White
strip.show();
} else if ( pattern == 'C') {
colorWipe(strip.Color(0, 0, 255), 50); // Blue
theaterChase(strip.Color(127, 127, 127), 50); // White
strip.show();
} else if ( pattern == 'D') {
colorWipe(strip.Color(255, 0, 255), 50); // Blue
theaterChase(strip.Color(127, 127, 127), 50); // White
strip.show();
}
Serial.println(letter);
}
}
/* Simple "moving average" filter, removes low noise and other small
* anomalies, with the effect of smoothing out the data stream. */
byte getAverageSample(byte samples[], unsigned int num, unsigned int pos,
unsigned int step)
{
unsigned int ret;
unsigned int size = step * 2;
if (pos < (step * 3) || pos > (num * 3) - (step * 3)) {
ret = samples[pos];
} else {
ret = 0;
pos -= (step * 3);
for (unsigned int i = 0; i < size; ++i) {
ret += samples[pos - (3 * i)];
}
ret /= size;
}
return (byte)ret;
}
/* We need to compress the stream of raw accelerometer data into 128 bytes, so
* it will fit into a neuron, while preserving as much of the original pattern
* as possible. Assuming there will typically be 1-2 seconds worth of
* accelerometer data at 200Hz, we will need to throw away over 90% of it to
* meet that goal!
*
* This is done in 2 ways:
*
* 1. Each sample consists of 3 signed 16-bit values (one each for X, Y and Z).
* Map each 16 bit value to a range of 0-255 and pack it into a byte,
* cutting sample size in half.
*
* 2. Undersample. If we are sampling at 200Hz and the button is held for 1.2
* seconds, then we'll have ~240 samples. Since we know now that each
* sample, once compressed, will occupy 3 of our neuron's 128 bytes
* (see #1), then we know we can only fit 42 of those 240 samples into a
* single neuron (128 / 3 = 42.666). So if we take (for example) every 5th
* sample until we have 42, then we should cover most of the sample window
* and have some semblance of the original pattern. */
void undersample(byte samples[], int numSamples, byte vector[])
{
unsigned int vi = 0;
unsigned int si = 0;
unsigned int step = numSamples / samplesPerVector;
unsigned int remainder = numSamples - (step * samplesPerVector);
/* Centre sample window */
samples += (remainder / 2) * 3;
for (unsigned int i = 0; i < samplesPerVector; ++i) {
for (unsigned int j = 0; j < 3; ++j) {
vector[vi + j] = getAverageSample(samples, numSamples, si + j, step);
}
si += (step * 3);
vi += 3;
}
}
void readVectorFromIMU(byte vector[])
{
byte accel[sensorBufSize];
int raw[3];
unsigned int samples = 0;
unsigned int i = 0;
/* Wait until button is pressed */
while (digitalRead(buttonPin) == LOW);
/* While button is being held... */
while (digitalRead(buttonPin) == HIGH) {
if (CurieIMU.dataReady()) {
CurieIMU.readAccelerometer(raw[0], raw[1], raw[2]);
/* Map raw values to 0-255 */
accel[i] = (byte) map(raw[0], IMULow, IMUHigh, 0, 255);
accel[i + 1] = (byte) map(raw[1], IMULow, IMUHigh, 0, 255);
accel[i + 2] = (byte) map(raw[2], IMULow, IMUHigh, 0, 255);
i += 3;
++samples;
/* If there's not enough room left in the buffers
* for the next read, then we're done */
if (i + 3 > sensorBufSize) {
break;
}
}
}
undersample(accel, samples, vector);
}
void trainLetter(char letter, unsigned int repeat)
{
unsigned int i = 0;
while (i < repeat) {
byte vector[vectorNumBytes];
if (i) Serial.println("And again...");
readVectorFromIMU(vector);
CuriePME.learn(vector, vectorNumBytes, letter - upperStart);
Serial.println("Got it!");
delay(1000);
++i;
}
}
void trainLetters()
{
for (char i = trainingStart; i <= trainingEnd; ++i) {
Serial.print("Hold down the button and draw the letter '");
Serial.print(String(i) + "' in the air. Release the button as soon ");
Serial.println("as you are done.");
trainLetter(i, trainingReps);
Serial.println("OK, finished with this letter.");
delay(2000);
}
}
///////////////Special light functions from Adafruit Strandtest Example Code
// Rainbow! Note- this function blocks new position inputs until it's finished.
void rainbowCycle(uint8_t wait) {
uint16_t i, j;
for(j=0; j<256*5; j++) { // 5 cycles of all colors on wheel
for(i=0; i< strip.numPixels(); i++) {
strip.setPixelColor(i, Wheel(((i * 256 / strip.numPixels()) + j) & 255));
}
strip.show();
delay(wait);
}
}
// Input a value 0 to 255 to get a color value. Used for rainbow effect above.
// The colours are a transition r - g - b - back to r.
uint32_t Wheel(byte WheelPos) {
WheelPos = 255 - WheelPos;
if(WheelPos < 85) {
return strip.Color(255 - WheelPos * 3, 0, WheelPos * 3);
}
if(WheelPos < 170) {
WheelPos -= 85;
return strip.Color(0, WheelPos * 3, 255 - WheelPos * 3);
}
WheelPos -= 170;
return strip.Color(WheelPos * 3, 255 - WheelPos * 3, 0);
}
//////Theater Chase lights from Adafruit strandtest example code. This takes whatever the curent RGB value is, and does a "theatre chase" effect with it.
//Theatre-style crawling lights.
void theaterChase(uint32_t c, uint8_t wait) {
for (int j=0; j<10; j++) { //do 10 cycles of chasing
for (int q=0; q < 3; q++) {
for (uint16_t i=0; i < strip.numPixels(); i=i+3) {
strip.setPixelColor(i+q, c); //turn every third pixel on
}
strip.show();
delay(wait);
for (uint16_t i=0; i < strip.numPixels(); i=i+3) {
strip.setPixelColor(i+q, 0); //turn every third pixel off
}
}
}
}
// Fill the dots one after the other with a color
void colorWipe(uint32_t c, uint8_t wait) {
for(uint16_t i=0; i<strip.numPixels(); i++) {
strip.setPixelColor(i, c);
strip.show();
delay(wait);
}
}
//Theatre-style crawling lights with rainbow effect
void theaterChaseRainbow(uint8_t wait) {
for (int j=0; j < 256; j++) { // cycle all 256 colors in the wheel
for (int q=0; q < 3; q++) {
for (uint16_t i=0; i < strip.numPixels(); i=i+3) {
strip.setPixelColor(i+q, Wheel( (i+j) % 255)); //turn every third pixel on
}
strip.show();
delay(wait);
for (uint16_t i=0; i < strip.numPixels(); i=i+3) {
strip.setPixelColor(i+q, 0); //turn every third pixel off
}
}
}
}
/*
* This library is free software; you can redistribute it and/or
* modify it under the terms of the GNU Lesser General Public
* License as published by the Free Software Foundation; either
* version 2.1 of the License, or (at your option) any later version.
*
* This library is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
* Lesser General Public License for more details.
*
* You should have received a copy of the GNU Lesser General Public
* License along with this library; if not, write to the Free Software
* Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA
*/




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments
Please log in or sign up to comment.