


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
_dyynx0bnuf_8u4Xi07d4z.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| |||||
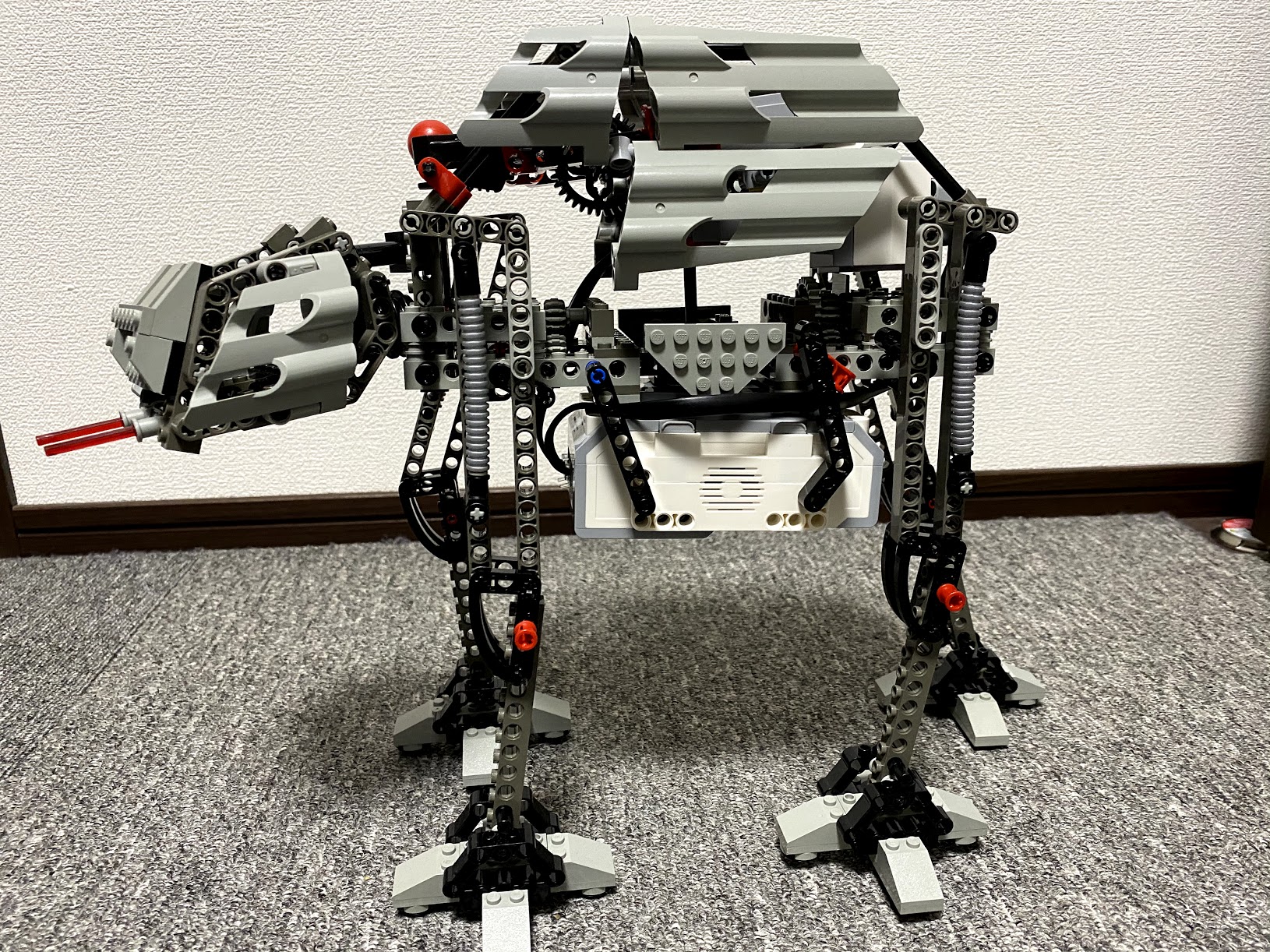
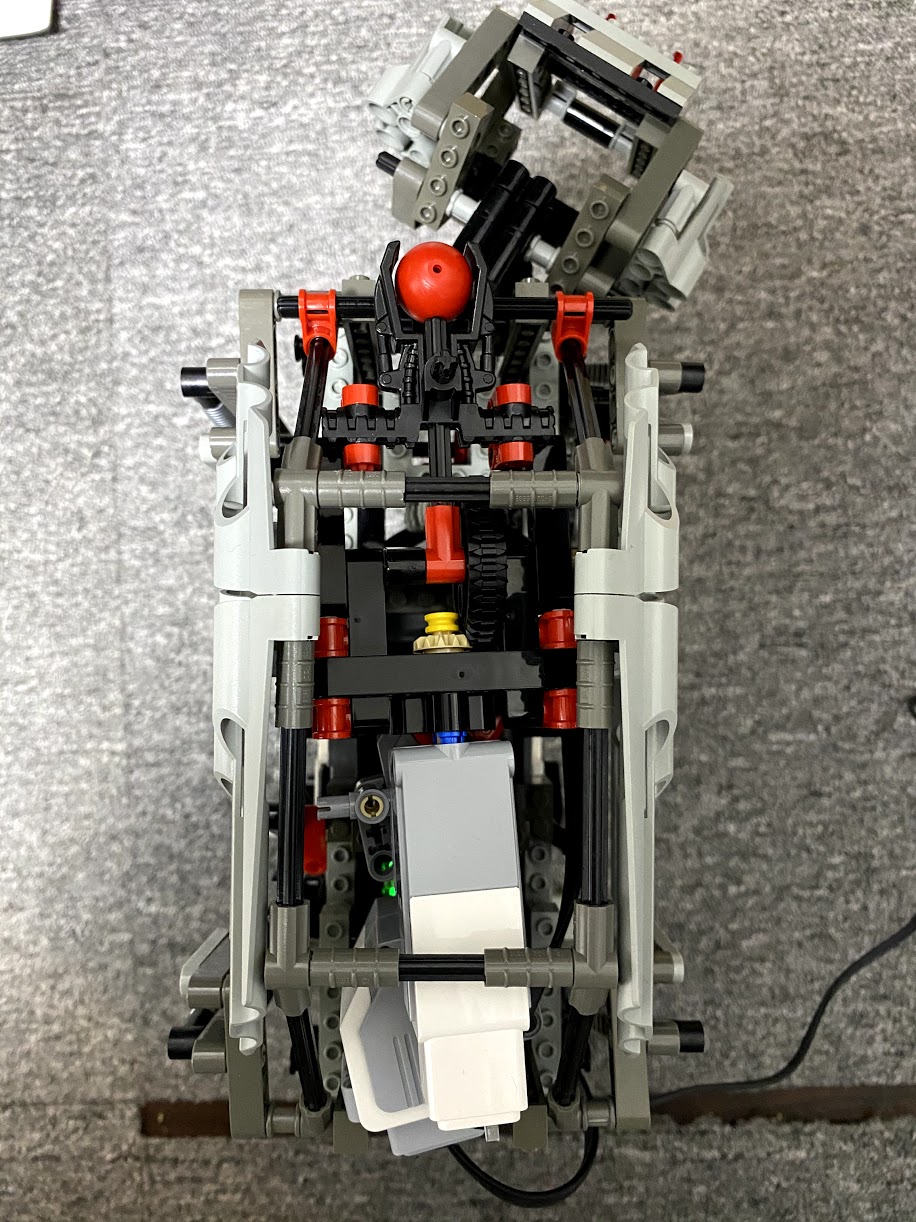
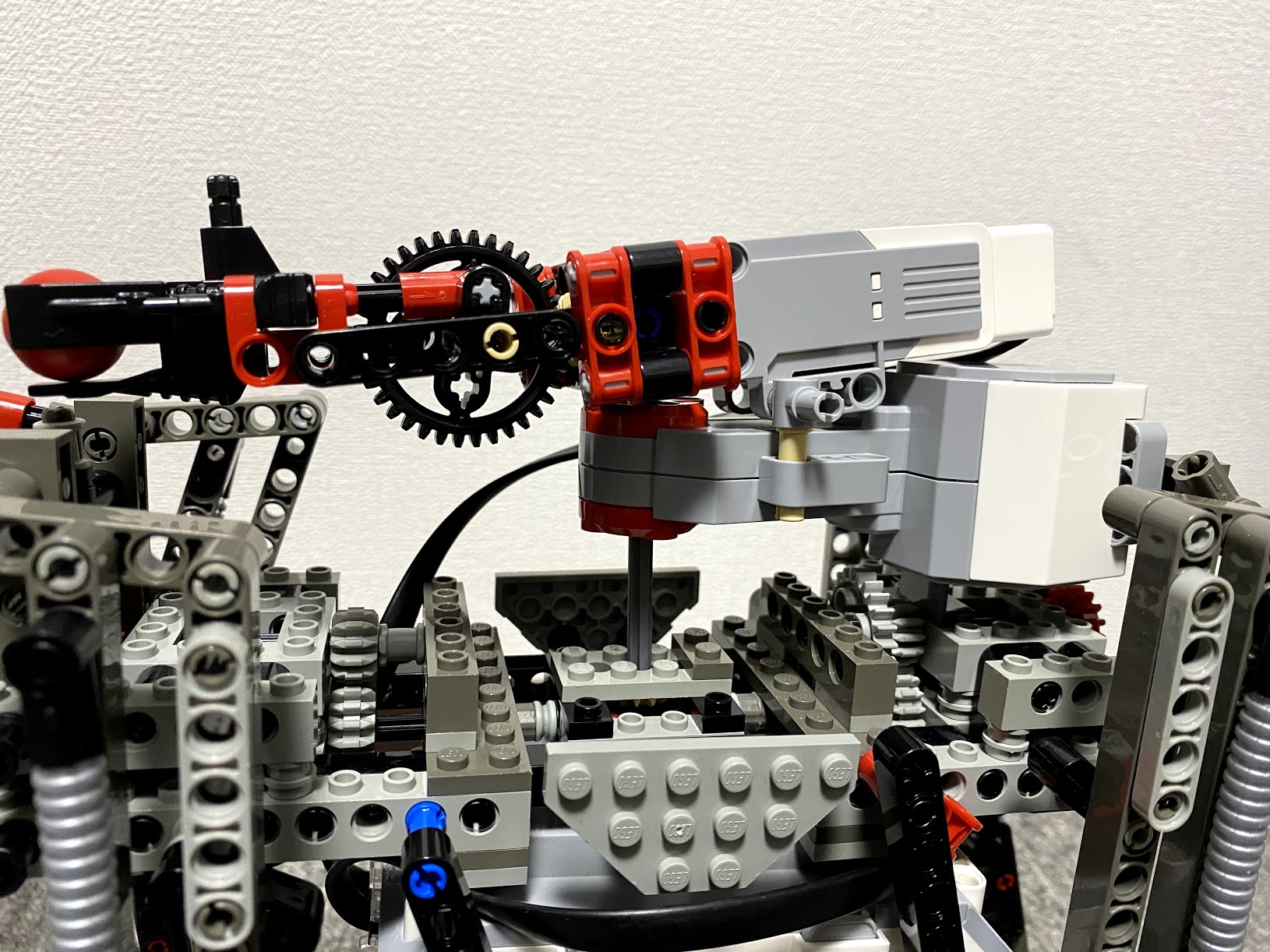
I'm a huge fan of Star Wars and especially love AT-AT.
With Alexa Gadget Toolkit, I've updated Lego Mindstorm Dark Side : AT-AT with EV3 to be able to control with Alexa! Next upgrade will be adding camera on the face of AT-AT and be able to control AT-AT with Echo Show as cockpit view!
(sorry the video is in Japanese)
{kind=link}
{kind=link}
{kind=link}
/*
* Copyright 2019 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* You may not use this file except in compliance with the terms and conditions
* set forth in the accompanying LICENSE.TXT file.
*
* THESE MATERIALS ARE PROVIDED ON AN "AS IS" BASIS. AMAZON SPECIFICALLY DISCLAIMS, WITH
* RESPECT TO THESE MATERIALS, ALL WARRANTIES, EXPRESS, IMPLIED, OR STATUTORY, INCLUDING
* THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, AND NON-INFRINGEMENT.
*/
// This sample demonstrates sending directives to an Echo connected gadget from an Alexa skill
// using the Alexa Skills Kit SDK (v2). Please visit https://alexa.design/cookbook for additional
// examples on implementing slots, dialog management, session persistence, api calls, and more.
const Alexa = require('ask-sdk-core');
const Util = require('./util');
const Common = require('./common');
// The namespace of the custom directive to be sent by this skill
const NAMESPACE = 'Custom.Mindstorms.Gadget';
// The name of the custom directive to be sent this skill
const NAME_CONTROL = 'control';
const LaunchRequestHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'LaunchRequest';
},
handle: async function(handlerInput) {
let request = handlerInput.requestEnvelope;
let { apiEndpoint, apiAccessToken } = request.context.System;
let apiResponse = await Util.getConnectedEndpoints(apiEndpoint, apiAccessToken);
if ((apiResponse.endpoints || []).length === 0) {
return handlerInput.responseBuilder
.speak(`Echo端末に接続されているEV3 Brickが見つかりませんでした。接続されていることを確認し再度試してください。`)
.getResponse();
}
// Store the gadget endpointId to be used in this skill session
let endpointId = apiResponse.endpoints[0].endpointId || [];
Util.putSessionAttribute(handlerInput, 'endpointId', endpointId);
//APL
var mainView = require('./mainView.json');
var mainSource = require('./mainData.json');
return handlerInput.responseBuilder
.speak("<voice name='Takumi'><prosody volume='x-loud' pitch='low'>接続が完了しました。コマンドをどうぞ。</prosody></voice><audio src='https://tkoba-alexa.s3-ap-northeast-1.amazonaws.com/starwars/starwars-bg10s.mp3' ></audio>")
.reprompt("<audio src='https://tkoba-alexa.s3-ap-northeast-1.amazonaws.com/starwars/starwars-bg10s.mp3' ></audio>")
.addDirective({
type: 'Alexa.Presentation.APL.RenderDocument',
token: 'mainView',
version: '1.2',
document: mainView,
datasources: mainSource
})
.getResponse();
}
};
// Add the speed value to the session attribute.
// This allows other intent handler to use the specified speed value
// without asking the user for input.
const SetSpeedIntentHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'IntentRequest'
&& Alexa.getIntentName(handlerInput.requestEnvelope) === 'SetSpeedIntent';
},
handle: function (handlerInput) {
// Bound speed to (1-100)
let speed = Alexa.getSlotValue(handlerInput.requestEnvelope, 'Speed');
speed = Math.max(1, Math.min(100, parseInt(speed)));
Util.putSessionAttribute(handlerInput, 'speed', speed);
return handlerInput.responseBuilder
.speak(`speed set to ${speed} percent.`)
.reprompt("awaiting command")
.getResponse();
}
};
// Construct and send a custom directive to the connected gadget with
// data from the MoveIntent request.
const MoveIntentHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'IntentRequest'
&& Alexa.getIntentName(handlerInput.requestEnvelope) === 'MoveIntent';
},
handle: function (handlerInput) {
const request = handlerInput.requestEnvelope;
var direction = Alexa.getSlotValue(request, 'Direction');
// Duration is optional, use default if not available
const duration = Alexa.getSlotValue(request, 'Duration') || "9";
// Get data from session attribute
const attributesManager = handlerInput.attributesManager;
const speed = attributesManager.getSessionAttributes().speed || "30";
const endpointId = attributesManager.getSessionAttributes().endpointId || [];
if(direction == "前" || direction == "前進"){
direction = 'forward';
}else if(direction == "後ろ" || direction == "バック"){
direction = 'back';
}else if(direction == "ストップ" || direction == "止まれ"){
direction = 'stop';
}else{
direction = 'stop';
}
//APL
var mainView = require('./mainView.json');
var mainSource = require('./walkingData.json');
// Construct the directive with the payload containing the move parameters
const directive = Util.build(endpointId, NAMESPACE, NAME_CONTROL,
{
type: 'move',
direction: direction,
duration: duration,
speed: speed
});
var speechOutput = (direction === "brake")
? "Applying brake"
: `${direction}、 ${duration} 秒間、 ${speed} %のスピード。`;
speechOutput = '<audio src="https://tkoba-alexa.s3-ap-northeast-1.amazonaws.com/starwars/ATST-Walk10s.mp3" ></audio>';
speechOutput += '<audio src="https://tkoba-alexa.s3-ap-northeast-1.amazonaws.com/starwars/starwars-bg.mp3" ></audio>';
return handlerInput.responseBuilder
.speak(speechOutput)
.reprompt("<audio src='https://tkoba-alexa.s3-ap-northeast-1.amazonaws.com/starwars/starwars-bg10s.mp3' ></audio>")
.addDirective(directive)
.addDirective({
type: 'Alexa.Presentation.APL.RenderDocument',
token: 'mainView',
version: '1.2',
document: mainView,
datasources: mainSource
})
.getResponse();
}
};
// Construct and send a custom directive to the connected gadget with data from
// the SetCommandIntent request.
const SetCommandIntentHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'IntentRequest'
&& Alexa.getIntentName(handlerInput.requestEnvelope) === 'SetCommandIntent';
},
handle: function (handlerInput) {
let command = Alexa.getSlotValue(handlerInput.requestEnvelope, 'Command');
if (!command) {
return handlerInput.responseBuilder
.speak("Can you repeat that?")
.reprompt("What was that again?").getResponse();
}
const attributesManager = handlerInput.attributesManager;
let endpointId = attributesManager.getSessionAttributes().endpointId || [];
let speed = attributesManager.getSessionAttributes().speed || "50";
if(command == "攻撃"){
command = "fire_one";
}
// Construct the directive with the payload containing the move parameters
let directive = Util.build(endpointId, NAMESPACE, NAME_CONTROL,
{
type: 'command',
command: command,
speed: speed
});
//APL
var mainView = require('./mainView.json');
var mainSource = require('./shootData.json');
return handlerInput.responseBuilder
.speak("<voice name='Takumi'><prosody volume='x-loud' pitch='low'>発射!! </prosody></voice><audio src='https://tkoba-alexa.s3-ap-northeast-1.amazonaws.com/starwars/ATST-ChinGuns.mp3' ></audio><audio src='https://tkoba-alexa.s3-ap-northeast-1.amazonaws.com/starwars/ATST-ChinGuns.mp3' ></audio>")
.reprompt("<audio src='https://tkoba-alexa.s3-ap-northeast-1.amazonaws.com/starwars/starwars-bg10s.mp3' ></audio>")
.addDirective(directive)
.addDirective({
type: 'Alexa.Presentation.APL.RenderDocument',
token: 'mainView',
version: '1.2',
document: mainView,
datasources: mainSource
})
.getResponse();
}
};
// The SkillBuilder acts as the entry point for your skill, routing all request and response
// payloads to the handlers above. Make sure any new handlers or interceptors you've
// defined are included below. The order matters - they're processed top to bottom.
exports.handler = Alexa.SkillBuilders.custom()
.addRequestHandlers(
LaunchRequestHandler,
SetSpeedIntentHandler,
SetCommandIntentHandler,
MoveIntentHandler,
Common.HelpIntentHandler,
Common.CancelAndStopIntentHandler,
Common.SessionEndedRequestHandler,
Common.IntentReflectorHandler, // make sure IntentReflectorHandler is last so it doesn't override your custom intent handlers
)
.addRequestInterceptors(Common.RequestInterceptor)
.addErrorHandlers(
Common.ErrorHandler,
)
.lambda();
#!/usr/bin/env python3
# Copyright 2019 Amazon.com, Inc. or its affiliates. All Rights Reserved.
#
# You may not use this file except in compliance with the terms and conditions
# set forth in the accompanying LICENSE.TXT file.
#
# THESE MATERIALS ARE PROVIDED ON AN "AS IS" BASIS. AMAZON SPECIFICALLY DISCLAIMS, WITH
# RESPECT TO THESE MATERIALS, ALL WARRANTIES, EXPRESS, IMPLIED, OR STATUTORY, INCLUDING
# THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, AND NON-INFRINGEMENT.
import os
import sys
import time
import logging
import json
import random
import threading
from enum import Enum
from agt import AlexaGadget
from ev3dev2.led import Leds
from ev3dev2.sound import Sound
from ev3dev2.motor import OUTPUT_A, OUTPUT_B, SpeedPercent, LargeMotor, MediumMotor
# Set the logging level to INFO to see messages from AlexaGadget
logging.basicConfig(level=logging.INFO, stream=sys.stdout, format='%(message)s')
logging.getLogger().addHandler(logging.StreamHandler(sys.stderr))
logger = logging.getLogger(__name__)
class Direction(Enum):
"""
The list of directional commands and their variations.
These variations correspond to the skill slot values.
"""
FORWARD = ['forward']
BACKWARD = ['back']
STOP = ['stop']
class Command(Enum):
"""
The list of preset commands and their invocation variation.
These variations correspond to the skill slot values.
"""
PATROL = ['patrol']
FIRE_ONE = ['fire_one']
FIRE_ALL = ['fire_all']
class MindstormsGadget(AlexaGadget):
"""
A Mindstorms gadget that performs movement based on voice commands.
Two types of commands are supported, directional movement and preset.
"""
def __init__(self):
"""
Performs Alexa Gadget initialization routines and ev3dev resource allocation.
"""
super().__init__()
# Gadget state
self.patrol_mode = False
# Ev3dev initialization
self.leds = Leds()
self.sound = Sound()
self.drive = LargeMotor(OUTPUT_B)
self.weapon = MediumMotor(OUTPUT_A)
# Start threads
threading.Thread(target=self._patrol_thread, daemon=True).start()
def on_connected(self, device_addr):
"""
Gadget connected to the paired Echo device.
:param device_addr: the address of the device we connected to
"""
self.leds.set_color("LEFT", "GREEN")
self.leds.set_color("RIGHT", "GREEN")
logger.info("{} connected to Echo device".format(self.friendly_name))
def on_disconnected(self, device_addr):
"""
Gadget disconnected from the paired Echo device.
:param device_addr: the address of the device we disconnected from
"""
self.leds.set_color("LEFT", "BLACK")
self.leds.set_color("RIGHT", "BLACK")
logger.info("{} disconnected from Echo device".format(self.friendly_name))
def on_custom_mindstorms_gadget_control(self, directive):
"""
Handles the Custom.Mindstorms.Gadget control directive.
:param directive: the custom directive with the matching namespace and name
"""
try:
payload = json.loads(directive.payload.decode("utf-8"))
print("Control payload: {}".format(payload), file=sys.stderr)
control_type = payload["type"]
if control_type == "move":
# Expected params: [direction, duration, speed]
self._move(payload["direction"], int(payload["duration"]), int(payload["speed"]))
if control_type == "command":
# Expected params: [command]
self._activate(payload["command"])
except KeyError:
print("Missing expected parameters: {}".format(directive), file=sys.stderr)
def _move(self, direction, duration: int, speed: int, is_blocking=False):
"""
Handles move commands from the directive.
Right and left movement can under or over turn depending on the surface type.
:param direction: the move direction
:param duration: the duration in seconds
:param speed: the speed percentage as an integer
:param is_blocking: if set, motor run until duration expired before accepting another command
"""
print("Move command: ({}, {}, {}, {})".format(direction, speed, duration, is_blocking), file=sys.stderr)
if direction in Direction.FORWARD.value:
self.drive.run_timed(speed_sp=int(-speed*10), time_sp=int(duration*int(1000)))
#self.drive.on_for_seconds(SpeedPercent(speed), SpeedPercent(speed), duration, block=is_blocking)
if direction in Direction.BACKWARD.value:
self.drive.run_timed(speed_sp=int(speed*10), time_sp=int(duration*int(1000)))
#self.drive.on_for_seconds(SpeedPercent(-speed), SpeedPercent(-speed), duration, block=is_blocking)
# if direction in (Direction.RIGHT.value + Direction.LEFT.value):
# self._turn(direction, speed)
# self.drive.on_for_seconds(SpeedPercent(speed), SpeedPercent(speed), duration, block=is_blocking)
if direction in Direction.STOP.value:
self.drive.off()
self.patrol_mode = False
def _activate(self, command, speed=50):
"""
Handles preset commands.
:param command: the preset command
:param speed: the speed if applicable
"""
print("Activate command: ({}, {})".format(command, speed), file=sys.stderr)
# if command in Command.MOVE_CIRCLE.value:
# self.drive.on_for_seconds(SpeedPercent(int(speed)), SpeedPercent(5), 12)
# if command in Command.MOVE_SQUARE.value:
# for i in range(4):
# self._move("right", 2, speed, is_blocking=True)
if command in Command.PATROL.value:
# Set patrol mode to resume patrol thread processing
self.patrol_mode = True
if command in Command.FIRE_ONE.value:
self.weapon.on_for_rotations(SpeedPercent(100), 3)
# if command in Command.FIRE_ALL.value:
# self.weapon.on_for_rotations(SpeedPercent(100), 10)
def _turn(self, direction, speed):
"""
Turns based on the specified direction and speed.
Calibrated for hard smooth surface.
:param direction: the turn direction
:param speed: the turn speed
"""
# if direction in Direction.LEFT.value:
# self.drive.on_for_seconds(SpeedPercent(0), SpeedPercent(speed), 2)
# if direction in Direction.RIGHT.value:
# self.drive.on_for_seconds(SpeedPercent(speed), SpeedPercent(0), 2)
def _patrol_thread(self):
"""
Performs random movement when patrol mode is activated.
"""
while True:
while self.patrol_mode:
print("Patrol mode activated randomly picks a path", file=sys.stderr)
direction = random.choice(list(Direction))
duration = random.randint(1, 5)
speed = random.randint(1, 4) * 25
while direction == Direction.STOP:
direction = random.choice(list(Direction))
# direction: all except stop, duration: 1-5s, speed: 25, 50, 75, 100
self._move(direction.value[0], duration, speed)
time.sleep(duration)
time.sleep(1)
if __name__ == '__main__':
gadget = MindstormsGadget()
# Set LCD font and turn off blinking LEDs
os.system('setfont Lat7-Terminus12x6')
gadget.leds.set_color("LEFT", "BLACK")
gadget.leds.set_color("RIGHT", "BLACK")
# Startup sequence
gadget.sound.play_song((('C4', 'e'), ('D4', 'e'), ('E5', 'q')))
gadget.leds.set_color("LEFT", "GREEN")
gadget.leds.set_color("RIGHT", "GREEN")
# Gadget main entry point
gadget.main()
# Shutdown sequence
gadget.sound.play_song((('E5', 'e'), ('C4', 'e')))
gadget.leds.set_color("LEFT", "BLACK")
gadget.leds.set_color("RIGHT", "BLACK")
# Copyright 2019 Amazon.com, Inc. or its affiliates. All Rights Reserved.
#
# You may not use this file except in compliance with the terms and conditions
# set forth in the accompanying LICENSE.TXT file.
#
# THESE MATERIALS ARE PROVIDED ON AN "AS IS" BASIS. AMAZON SPECIFICALLY DISCLAIMS, WITH
# RESPECT TO THESE MATERIALS, ALL WARRANTIES, EXPRESS, IMPLIED, OR STATUTORY, INCLUDING
# THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, AND NON-INFRINGEMENT.
[GadgetSettings]
amazonId = YOUR_GADGET_AMAZON_ID
alexaGadgetSecret = YOUR_GADGET_SECRET
[GadgetCapabilities]
Custom.Mindstorms.Gadget = 1.0
/*
* Copyright 2019 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* You may not use this file except in compliance with the terms and conditions
* set forth in the accompanying LICENSE.TXT file.
*
* THESE MATERIALS ARE PROVIDED ON AN "AS IS" BASIS. AMAZON SPECIFICALLY DISCLAIMS, WITH
* RESPECT TO THESE MATERIALS, ALL WARRANTIES, EXPRESS, IMPLIED, OR STATUTORY, INCLUDING
* THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, AND NON-INFRINGEMENT.
*/
'use strict'
const Alexa = require('ask-sdk-core');
const HelpIntentHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'IntentRequest'
&& Alexa.getIntentName(handlerInput.requestEnvelope) === 'AMAZON.HelpIntent';
},
handle(handlerInput) {
const speakOutput = 'You can say hello to me! How can I help?';
return handlerInput.responseBuilder
.speak(speakOutput)
.reprompt(speakOutput)
.getResponse();
}
};
const CancelAndStopIntentHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'IntentRequest'
&& (Alexa.getIntentName(handlerInput.requestEnvelope) === 'AMAZON.CancelIntent'
|| Alexa.getIntentName(handlerInput.requestEnvelope) === 'AMAZON.StopIntent');
},
handle(handlerInput) {
const speakOutput = "<voice name='Takumi'><prosody volume='x-loud' pitch='low'>了解!</prosody></voice>";
return handlerInput.responseBuilder
.speak(speakOutput)
.getResponse();
}
};
const SessionEndedRequestHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'SessionEndedRequest';
},
handle(handlerInput) {
// Any cleanup logic goes here.
return handlerInput.responseBuilder.getResponse();
}
};
// The intent reflector is used for interaction model testing and debugging.
// It will simply repeat the intent the user said. You can create custom handlers
// for your intents by defining them above, then also adding them to the request
// handler chain below.
const IntentReflectorHandler = {
canHandle(handlerInput) {
return Alexa.getRequestType(handlerInput.requestEnvelope) === 'IntentRequest';
},
handle(handlerInput) {
const intentName = Alexa.getIntentName(handlerInput.requestEnvelope);
const speakOutput = `You just triggered ${intentName}`;
return handlerInput.responseBuilder
.speak(speakOutput)
.reprompt("I don't understand this command, try again")
.getResponse();
}
};
// Generic error handling to capture any syntax or routing errors. If you receive an error
// stating the request handler chain is not found, you have not implemented a handler for
// the intent being invoked or included it in the skill builder below.
const ErrorHandler = {
canHandle() {
return true;
},
handle(handlerInput, error) {
console.log(`~~~~ Error handled: ${error.stack}`);
const speakOutput = `Sorry, I had trouble doing what you asked. Please try again.`;
return handlerInput.responseBuilder
.speak(speakOutput)
.reprompt(speakOutput)
.getResponse();
}
};
// The request interceptor is used for request handling testing and debugging.
// It will simply log the request in raw json format before any processing is performed.
const RequestInterceptor = {
process(handlerInput) {
let { attributesManager, requestEnvelope } = handlerInput;
let sessionAttributes = attributesManager.getSessionAttributes();
// Log the request for debug purposes.
console.log(`=====Request==${JSON.stringify(requestEnvelope)}`);
console.log(`=========SessionAttributes==${JSON.stringify(sessionAttributes, null, 2)}`);
}
};
module.exports = {
HelpIntentHandler,
CancelAndStopIntentHandler,
SessionEndedRequestHandler,
IntentReflectorHandler,
ErrorHandler,
RequestInterceptor
};
{
"interactionModel": {
"languageModel": {
"invocationName": "スターウォーズ",
"intents": [
{
"name": "AMAZON.CancelIntent",
"samples": []
},
{
"name": "AMAZON.HelpIntent",
"samples": []
},
{
"name": "AMAZON.StopIntent",
"samples": []
},
{
"name": "AMAZON.NavigateHomeIntent",
"samples": []
},
{
"name": "MoveIntent",
"slots": [
{
"name": "Direction",
"type": "DirectionType"
},
{
"name": "Duration",
"type": "AMAZON.NUMBER"
}
],
"samples": [
"{Direction} して",
"{Direction} を {Duration} 秒",
"{Direction} に {Duration} 秒",
"{Direction}"
]
},
{
"name": "SetSpeedIntent",
"slots": [
{
"name": "Speed",
"type": "AMAZON.NUMBER"
}
],
"samples": [
"スピードを {Speed} パーセントに設定",
"{Speed} パーセント",
"スピードを {Speed} パーセント",
"スピードを {Speed} "
]
},
{
"name": "SetCommandIntent",
"slots": [
{
"name": "Command",
"type": "CommandType"
}
],
"samples": [
"{Command} モード",
"{Command}"
]
}
],
"types": [
{
"name": "DirectionType",
"values": [
{
"name": {
"value": "前進"
}
},
{
"name": {
"value": "バック"
}
},
{
"name": {
"value": "止まれ"
}
},
{
"name": {
"value": "ストップ"
}
},
{
"name": {
"value": "後ろに戻れ"
}
},
{
"name": {
"value": "後ろ"
}
},
{
"name": {
"value": "前に進め"
}
},
{
"name": {
"value": "前"
}
}
]
},
{
"name": "CommandType",
"values": [
{
"name": {
"value": "全部撃て"
}
},
{
"name": {
"value": "発射"
}
},
{
"name": {
"value": "攻撃"
}
},
{
"name": {
"value": "撃て"
}
},
{
"name": {
"value": "ガードモード"
}
},
{
"name": {
"value": "パトロール"
}
}
]
}
]
}
}
}
{
"type": "APL",
"version": "1.1",
"settings": {},
"theme": "dark",
"import": [
{
"name": "alexa-layouts",
"version": "1.0.0"
}
],
"resources": [
{
"description": "Stock color for the light theme",
"colors": {
"colorTextPrimary": "#151920"
}
},
{
"description": "Stock color for the dark theme",
"when": "${viewport.theme == 'dark'}",
"colors": {
"colorTextPrimary": "#f0f1ef"
}
},
{
"description": "Standard font sizes",
"dimensions": {
"textSizeBody": 48,
"textSizePrimary": 27,
"textSizeSecondary": 23,
"textSizeSecondaryHint": 25
}
},
{
"description": "Common spacing values",
"dimensions": {
"spacingThin": 6,
"spacingSmall": 12,
"spacingMedium": 24,
"spacingLarge": 48,
"spacingExtraLarge": 72
}
},
{
"description": "Common margins and padding",
"dimensions": {
"marginTop": 40,
"marginLeft": 60,
"marginRight": 60,
"marginBottom": 40
}
}
],
"styles": {
"textStyleBase": {
"description": "Base font description; set color",
"values": [
{
"color": "@colorTextPrimary"
}
]
},
"textStyleBase0": {
"description": "Thin version of basic font",
"extend": "textStyleBase",
"values": {
"fontWeight": "100"
}
},
"textStyleBase1": {
"description": "Light version of basic font",
"extend": "textStyleBase",
"values": {
"fontWeight": "300"
}
},
"mixinBody": {
"values": {
"fontSize": "@textSizeBody"
}
},
"mixinPrimary": {
"values": {
"fontSize": "@textSizePrimary"
}
},
"mixinSecondary": {
"values": {
"fontSize": "@textSizeSecondary"
}
},
"textStylePrimary": {
"extend": [
"textStyleBase1",
"mixinPrimary"
]
},
"textStyleSecondary": {
"extend": [
"textStyleBase0",
"mixinSecondary"
]
},
"textStyleBody": {
"extend": [
"textStyleBase1",
"mixinBody"
]
},
"textStyleSecondaryHint": {
"values": {
"fontFamily": "Bookerly",
"fontStyle": "italic",
"fontSize": "@textSizeSecondaryHint",
"color": "@colorTextPrimary"
}
}
},
"onMount": [],
"graphics": {},
"commands": {},
"layouts": {},
"mainTemplate": {
"parameters": [
"payload"
],
"items": [
{
"when": "${viewport.shape == 'round'}",
"type": "Container",
"direction": "column",
"items": [
{
"type": "Image",
"source": "${payload.bodyTemplate7Data.backgroundImage.sources[0].url}",
"scale": "best-fill",
"position": "absolute",
"width": "100vw",
"height": "100vh"
},
{
"type": "AlexaHeader",
"headerTitle": "${payload.bodyTemplate7Data.title}",
"headerAttributionImage": "${payload.bodyTemplate7Data.logoUrl}"
},
{
"type": "Container",
"grow": 1,
"alignItems": "center",
"justifyContent": "center",
"items": [
{
"type": "Image",
"source": "${payload.bodyTemplate7Data.image.sources[0].url}",
"scale": "best-fill",
"width": "100vh",
"height": "70vw",
"align": "center"
}
]
}
]
},
{
"type": "Container",
"height": "100vh",
"width": "100vw",
"items": [
{
"type": "Image",
"source": "${payload.bodyTemplate7Data.backgroundImage.sources[0].url}",
"scale": "best-fill",
"position": "absolute",
"width": "100vw",
"height": "100vh"
},
{
"type": "AlexaHeader",
"headerTitle": "${payload.bodyTemplate7Data.title}",
"headerAttributionImage": "${payload.bodyTemplate7Data.logoUrl}"
},
{
"type": "Container",
"direction": "row",
"paddingLeft": "5vw",
"paddingRight": "5vw",
"paddingBottom": "5vh",
"alignItems": "center",
"justifyContent": "center",
"items": [
{
"type": "Image",
"height": "70vh",
"width": "90vw",
"source": "${payload.bodyTemplate7Data.image.sources[0].url}",
"scale": "best-fill",
"align": "center"
}
]
}
]
}
]
}
}
{
"bodyTemplate7Data": {
"type": "object",
"objectId": "bt7Sample",
"title": "Star Wars : AT-AT",
"backgroundImage": {
"contentDescription": null,
"smallSourceUrl": null,
"largeSourceUrl": null,
"sources": [
{
"url": "https://s3.amazonaws.com/static.digg.com/images/8745ea4a89564121885e6290162e66a8_60bb2001fac04de8ac93109bdfdbc7a9_1_header.jpeg",
"size": "small",
"widthPixels": 0,
"heightPixels": 0
},
{
"url": "https://s3.amazonaws.com/static.digg.com/images/8745ea4a89564121885e6290162e66a8_60bb2001fac04de8ac93109bdfdbc7a9_1_header.jpeg",
"size": "large",
"widthPixels": 0,
"heightPixels": 0
}
]
},
"hintText": "Try, \"Alexa, search for blue cheese\""
}
}

Comments