/*
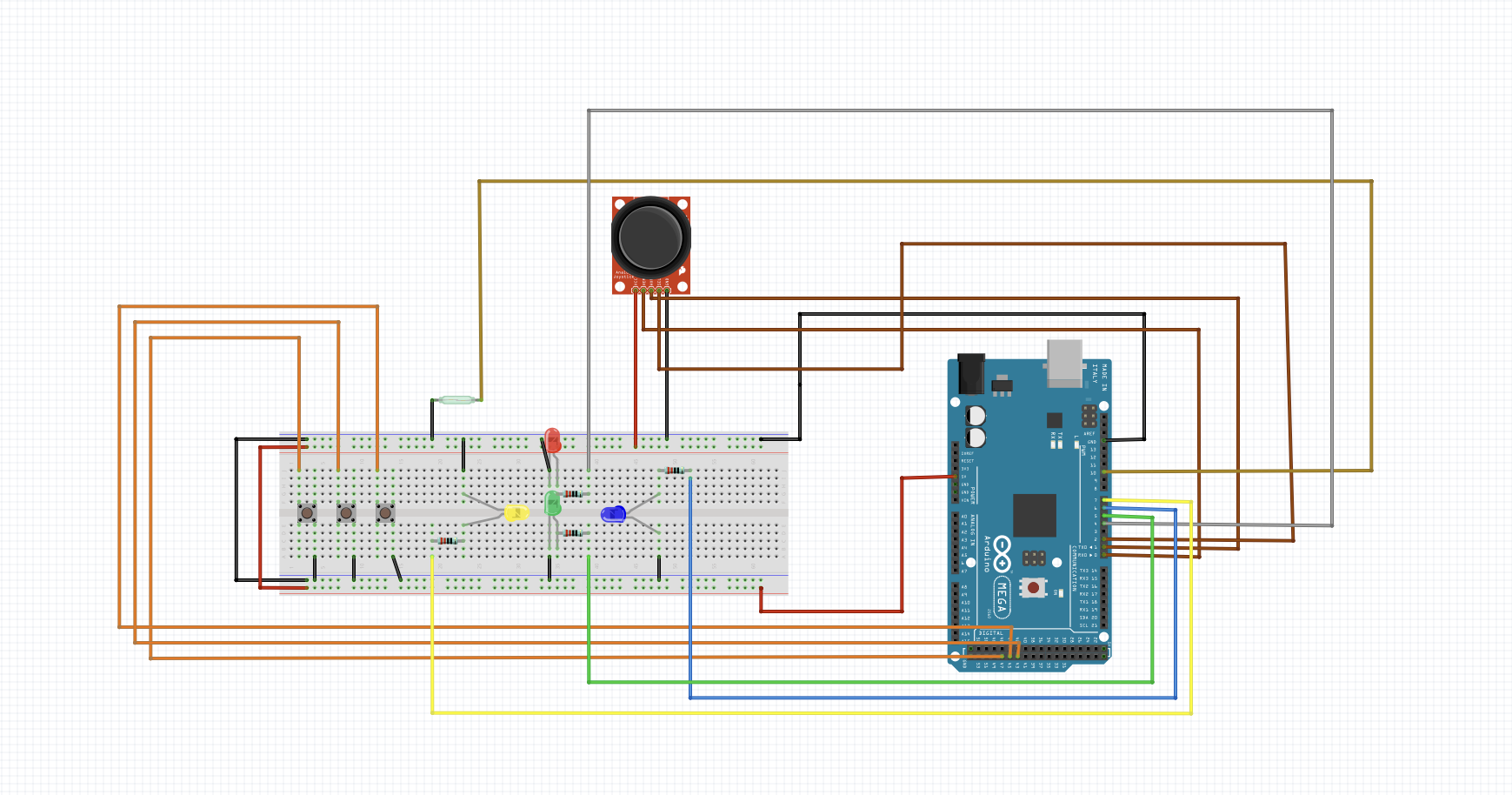
Arduino Joystick
7-segment display
4 leds
Rotary Encoder
Buzzer
Touch sensor
*/
//ADD FUNCTIONALTIY FOR DELAY
int pause = 2500;
int fast = 0;
//For Reed Switch / Find if the player got something wrong
int buttonpin = 10; //define switch port
int val; //define digital variable val
bool ON = false;
bool reedStart = false;
bool stillPlaying = true;
// For the code
const int codeLength = 4;
int sequence[codeLength];
int your_sequence[codeLength];
//For Difficulty Buttons
int Button3 = 47;
int Button5 = 45;
int Button7 = 49;
int prevDirection = 9;
int currentDirection = 8;
const int UP = 6;
const int DOWN = 4;
const int LEFT = 7;
const int RIGHT = 5;
// Joystick pin numbers
const int SW_pin = 2; // digital pin connected to switch output
const int X_pin = 0; // analog pin connected to X output
const int Y_pin = 1; // analog pin connected to Y output
//LED Pin Numbers
const int redLED = 4;
const int greenLED = 5;
const int blueLED = 6;
const int yellowLED = 7;
//Buzzer Pins
const int buzzer = 9;
//set delay 500
unsigned long int initTime = millis();
void setup() {
pinMode(SW_pin, INPUT);
digitalWrite(SW_pin, HIGH);
Serial.begin(9600);
pinMode(redLED, OUTPUT);
pinMode(greenLED, OUTPUT);
pinMode(blueLED, OUTPUT);
pinMode(yellowLED, OUTPUT);
pinMode(buttonpin, INPUT);//define switch as a output port
pinMode(Button3, INPUT_PULLUP);
pinMode(Button5, INPUT_PULLUP);
pinMode(Button7, INPUT_PULLUP);
/////////////////////////////////
while (fast == 0) {
if (digitalRead(Button3) == LOW) {
fast = 1500;
tone(buzzer, 1000);
delay(100);
noTone(buzzer);
} else if (digitalRead(Button5) == LOW) {
fast = 1000;
tone(buzzer, 1000);
delay(100);
noTone(buzzer);
} else if (digitalRead(Button7) == LOW) {
fast = 500;
tone(buzzer, 1000);
delay(100);
noTone(buzzer);
}
}
Serial.println(fast);
}
void loop() {
if (ON == 1 && stillPlaying == true) {
pause -= 20;
tone(buzzer, 500);
delay(500);
noTone(buzzer);
tone(buzzer, 900);
delay(500);
noTone(buzzer);
delay(200);
digitalWrite(redLED, HIGH);
digitalWrite(blueLED, HIGH);
digitalWrite(yellowLED, HIGH);
digitalWrite(greenLED, HIGH);
delay(300);
digitalWrite(redLED, LOW);
digitalWrite(blueLED, LOW);
digitalWrite(yellowLED, LOW);
digitalWrite(greenLED, LOW);
delay(200);
digitalWrite(redLED, HIGH);
digitalWrite(blueLED, HIGH);
digitalWrite(yellowLED, HIGH);
digitalWrite(greenLED, HIGH);
delay(300);
digitalWrite(redLED, LOW);
digitalWrite(blueLED, LOW);
digitalWrite(yellowLED, LOW);
digitalWrite(greenLED, LOW);
delay(2000);
generateSequence();
Serial.println("Sqeuence Generated");
delay(200);
tone(buzzer, 3000);
digitalWrite(redLED, HIGH);
digitalWrite(blueLED, HIGH);
digitalWrite(yellowLED, HIGH);
digitalWrite(greenLED, HIGH);
delay(300);
digitalWrite(redLED, LOW);
digitalWrite(blueLED, LOW);
digitalWrite(yellowLED, LOW);
digitalWrite(greenLED, LOW);
noTone(buzzer);
getSequence();
for (int i = 0; i < codeLength; i++) {
Serial.println(your_sequence[i]);
}
delay(300);
checkSequence();
Serial.println(stillPlaying);
}
val = digitalRead(buttonpin); //read the value of the digital interface 3 assigned to val
//Serial.println(ON);
if (val == LOW) {
ON = true;
}
}
void playTone(int led_num) {
if (led_num == UP) {
tone(buzzer, 3000);
delay(100);
} else if (led_num == DOWN) {
tone(buzzer, 4000);
delay(100);
} else if (led_num == LEFT) {
tone(buzzer, 1000);
delay(100);
} else if (led_num == RIGHT) {
tone(buzzer, 2000);
delay(100);
}
noTone(buzzer);
}
void generateSequence() {
for (int i = 0; i < codeLength; i++) {
randomSeed(analogRead(A13));
int randNumber = random(4, 8);
sequence[i] = randNumber;
Serial.println(sequence[i]);
}
tone(buzzer, 1000);
for (int i = 0; i < codeLength; i++) {
//Serial.print("Hello");
digitalWrite(sequence[i], HIGH);
playTone(sequence[i]);
delay(fast);
digitalWrite(sequence[i], LOW);
delay(fast);
}
}
void getSequence() {
Serial.println("Getting sequence");
int i = 0;
while (i < codeLength) {
//Serial.println(i);
int xPos = analogRead(X_pin);
int yPos = analogRead(Y_pin);
int SW_pin = digitalRead(SW_pin);
if (xPos >= 1020 && yPos >= 480) {
Serial.println("Red LED on");
your_sequence[i] = DOWN;
tone(buzzer, 4000);
delay(200);
noTone(buzzer);
digitalWrite(redLED, HIGH);
digitalWrite(blueLED, LOW);
digitalWrite(yellowLED, LOW);
digitalWrite(greenLED, LOW);
delay(300);
digitalWrite(redLED, LOW);
digitalWrite(blueLED, LOW);
digitalWrite(yellowLED, LOW);
digitalWrite(greenLED, LOW);
delay(1000);
i++;
} else if (xPos <= 10 && yPos >= 480) {
Serial.println("Blue LED on");
your_sequence[i] = UP;
tone(buzzer, 3000);
delay(200);
noTone(buzzer);
digitalWrite(redLED, LOW);
digitalWrite(blueLED, HIGH);
digitalWrite(yellowLED, LOW);
digitalWrite(greenLED, LOW);
delay(300);
digitalWrite(redLED, LOW);
digitalWrite(blueLED, LOW);
digitalWrite(yellowLED, LOW);
digitalWrite(greenLED, LOW);
delay(1000);
i++;
} else if (xPos >= 510 && yPos <= 10) {
Serial.println("Green LED on");
your_sequence[i] = RIGHT;
tone(buzzer, 2000);
delay(200);
noTone(buzzer);
digitalWrite(redLED, LOW);
digitalWrite(blueLED, LOW);
digitalWrite(yellowLED, LOW);
digitalWrite(greenLED, HIGH);
delay(300);
digitalWrite(redLED, LOW);
digitalWrite(blueLED, LOW);
digitalWrite(yellowLED, LOW);
digitalWrite(greenLED, LOW);
delay(1000);
i++;
} else if (xPos >= 510 && yPos >= 1020) {
Serial.println("Yellow LED on");
your_sequence[i] = LEFT;
tone(buzzer, 1000);
delay(200);
noTone(buzzer);
digitalWrite(redLED, LOW);
digitalWrite(blueLED, LOW);
digitalWrite(yellowLED, HIGH);
digitalWrite(greenLED, LOW);
delay(300);
digitalWrite(redLED, LOW);
digitalWrite(blueLED, LOW);
digitalWrite(yellowLED, LOW);
digitalWrite(greenLED, LOW);
delay(1000);
i++;
}
}
}
void checkSequence() {
for (int i = 0; i < codeLength; i++) {
if (your_sequence[i] != sequence[i]) {
stillPlaying = false;
digitalWrite(redLED, HIGH);
digitalWrite(blueLED, HIGH);
digitalWrite(yellowLED, HIGH);
digitalWrite(greenLED, HIGH);
tone(buzzer, 2000);
delay(700);
noTone(buzzer);
delay(200);
tone(buzzer, 1000);
delay(700);
noTone(buzzer);
}
}
}







_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







{kind=link}
Comments
Please log in or sign up to comment.