



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 3 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hello everyone, this is my first project so if any of the errors, please recommend. Thank you!
Before starting, first we should set up Bluetooth module as master 1 ea and slave 1 ea.
You can copy path of link video below.
1) How To Configure and Pair Two HC-05 Bluetooth Module as Master and Slave _ AT Commands
https://www.youtube.com/watch?v=hyME1osgr7s
2) How to Pair HC-05Bluetooth Modules
https://www.youtube.com/watch?v=BXXAcFOTnBo
Second Record voice into module voice recognition. I had attached manual already. you can follow it.
Let's do it:
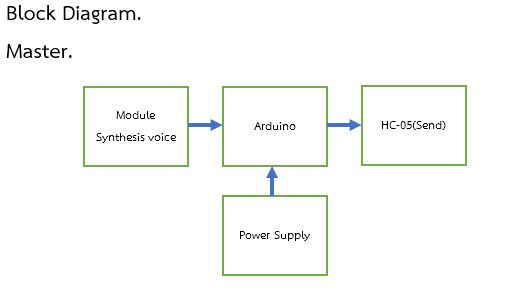
First, assemble circuit of master as block diagram below.
Then upload code into master.
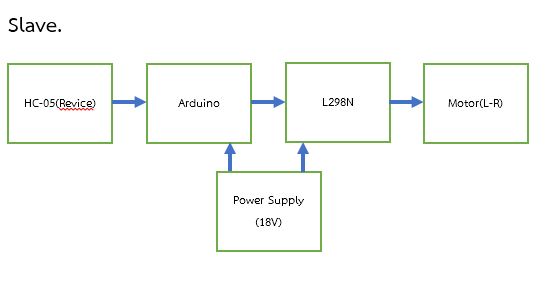
Second, assemble circuit of slave as block diagram below.
Then upload code into slave.

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.