The concept of this robot design is to create a quadruped that can easily transform between walking mode and rover mode (aka wheel traversing). The walking mode will be used for operations that are not ideal for wheels such as scaling a vertical wall or traversing over extremely uneven terrain. The rover mode is used for flat terrain and faster traveling time. The robot is controlled wirelessly via Wifi through a web page that I made exclusively for this robot. Beside the transforming capabilities, I also added an IMU sensors, GPS, and Lidar for self-orientation and autonomous functionality.
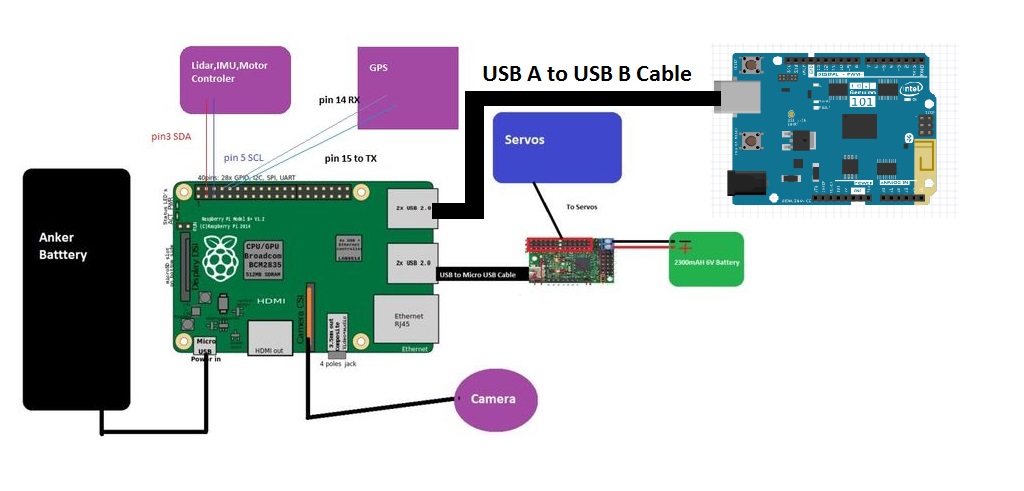
In this project, the Arduino 101 is used as the muscle control cortex. The Arduino 101 do calculation and control all the servo on the robot and transmit and share this data with the Raspberry Pi 2. The Rapsberry Pi 2 on the other hand will focus on transmitting video to the webpages and broadcast sensor data to the cloud for analyzing.
All the data is logged via IBM Watson and Node Red services and can be easily review in graph format for data analytics.The goal of this project is to create a low-cost multi-terrain traversing robot prototype for search and rescue operation.




_baVEVgguW1.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)




{kind=link}
Comments