


Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
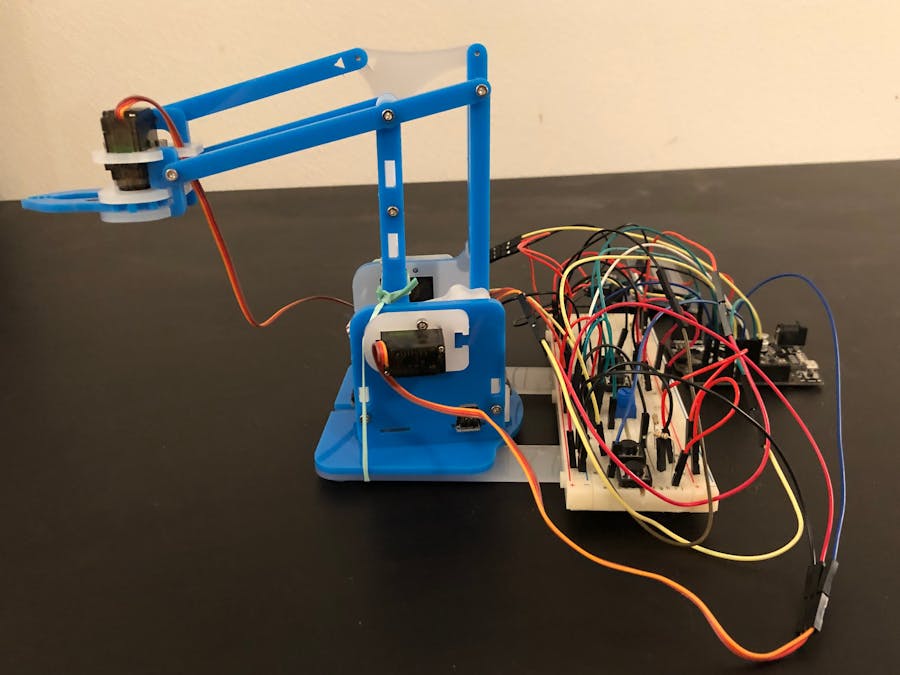
With the fast pace of modern life, a considerable amount of people decides not to make their own breakfast for the sake of time. The purpose of this project is to explore the possibility of building an affordable on-table smart robot arm that could help people make breakfast.
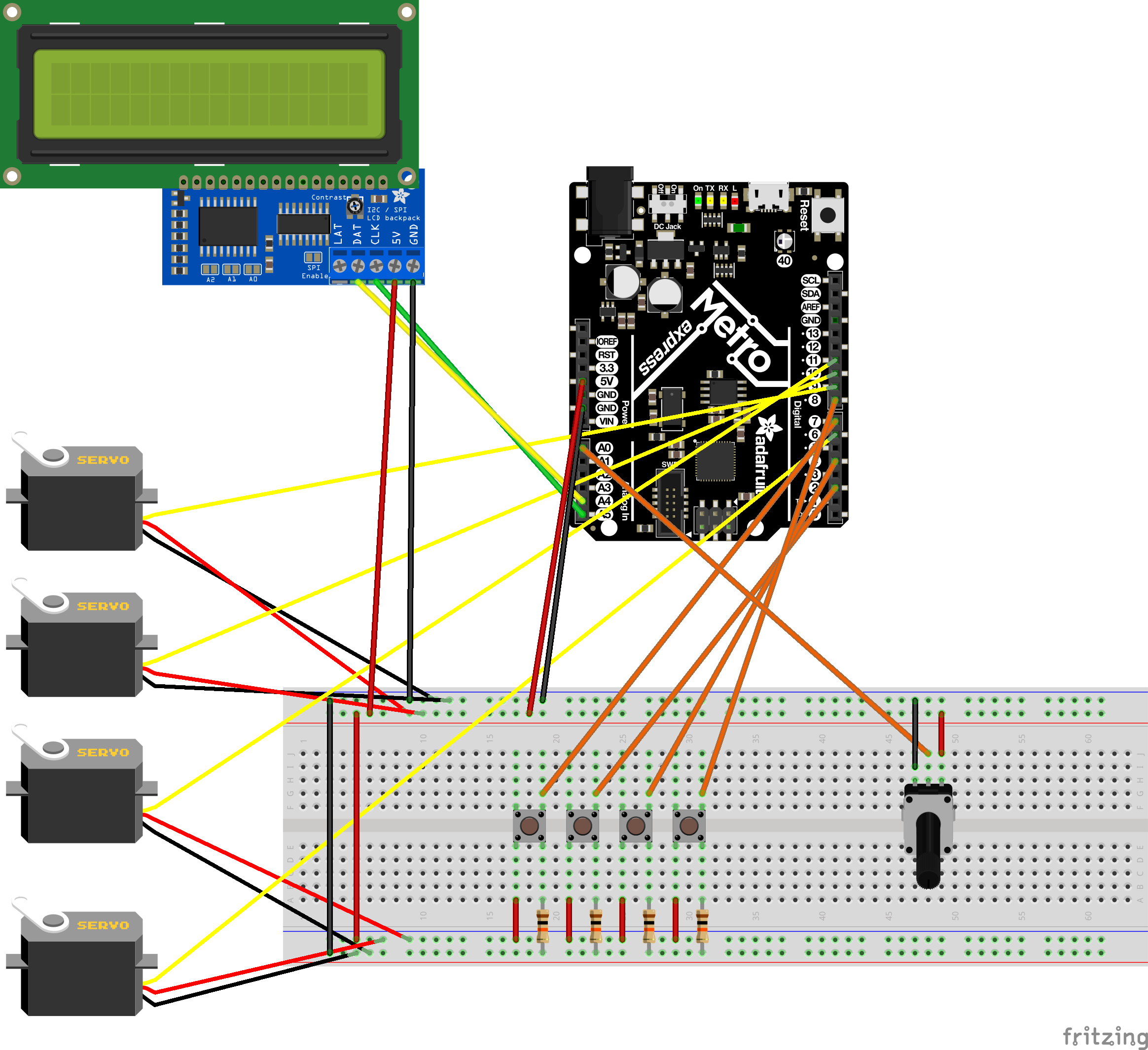
The robot arm has three parts: the mechanical structure, the Arduino components, and the arms. Most of the pieces are made from laser-cutting with acrylic as the base material. The arms could move 180 degrees, which allow it to operate free in a considerable area. Components include potential meters, motors, LCD and shields, and buttons. The potential meter is used to control the speed of the arm movement, and the four button each controls the movement of one motor. When a button is pressed, the corresponding arm starts moving between 0 to 180 degree, and stops when the button is released. A LCD display is used to show the name, position and the speed of the moving arm.
ImplementationHCDE 539 Physical Computing
University of Washington
The robot arm is assembled using the laser-cutting acrylic pieces and screws, with motors embedded in appropriate places. A motor is placed at the bottom to control the rotating movement of the arm on the base. Another motor is placed at the top of the arm which serves as the clamp. Two more motors are placed at the right and left side of the arm, working together to control the movement of the arm in the x-axis and y-axis directions.
The robot arm is powered by Arduino Metro. Four buttons are used to control the movement of the motors. The potential meter is used to control the speed of the arm movement, and the four button each controls the movement of one motor. When a button is pressed, the corresponding arm starts moving between 0 to 180 degree, and stops when the button is released. A LCD display is used to show the name, position and the speed of the moving arm.
{kind=link}

Comments