


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
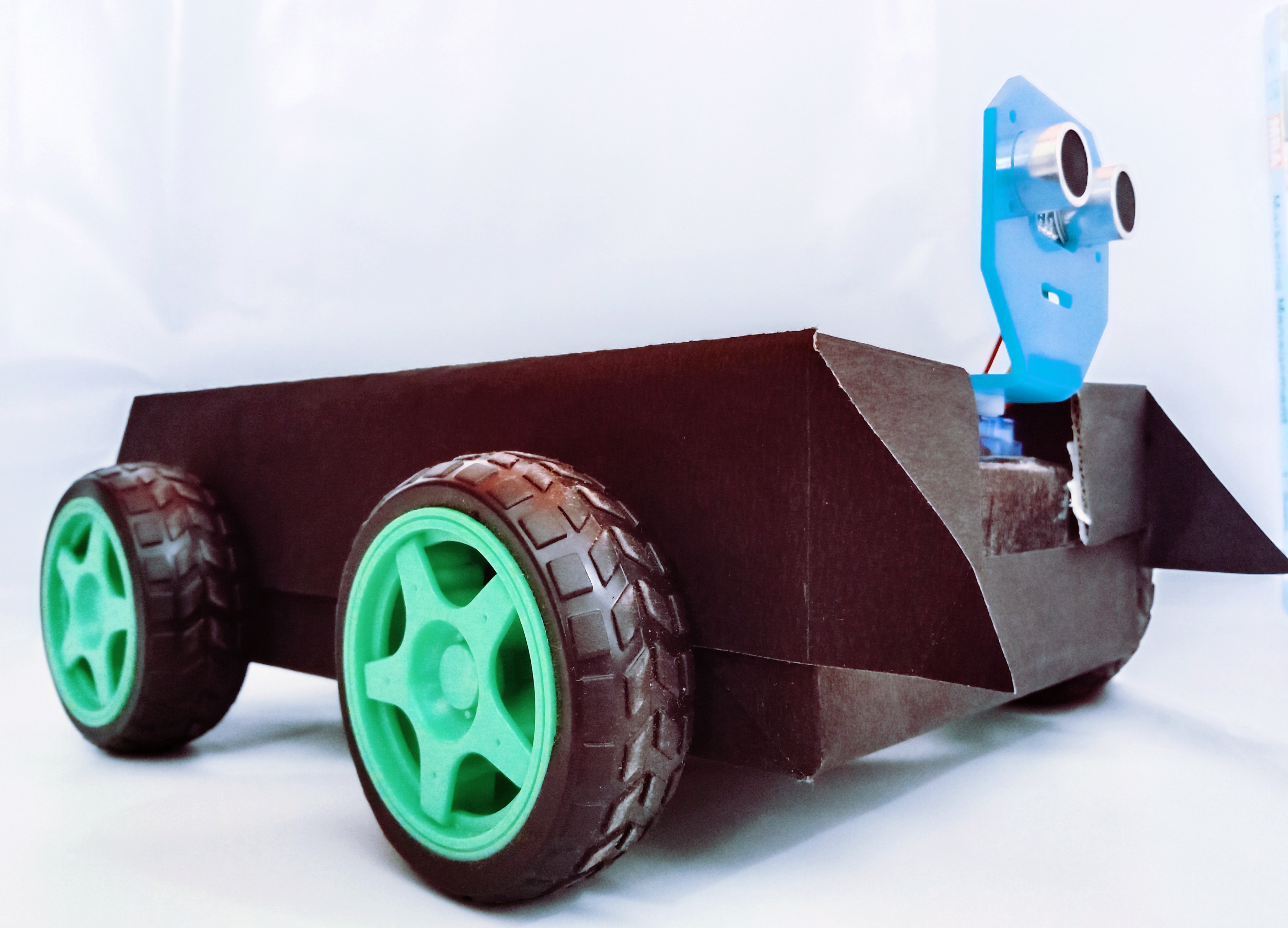
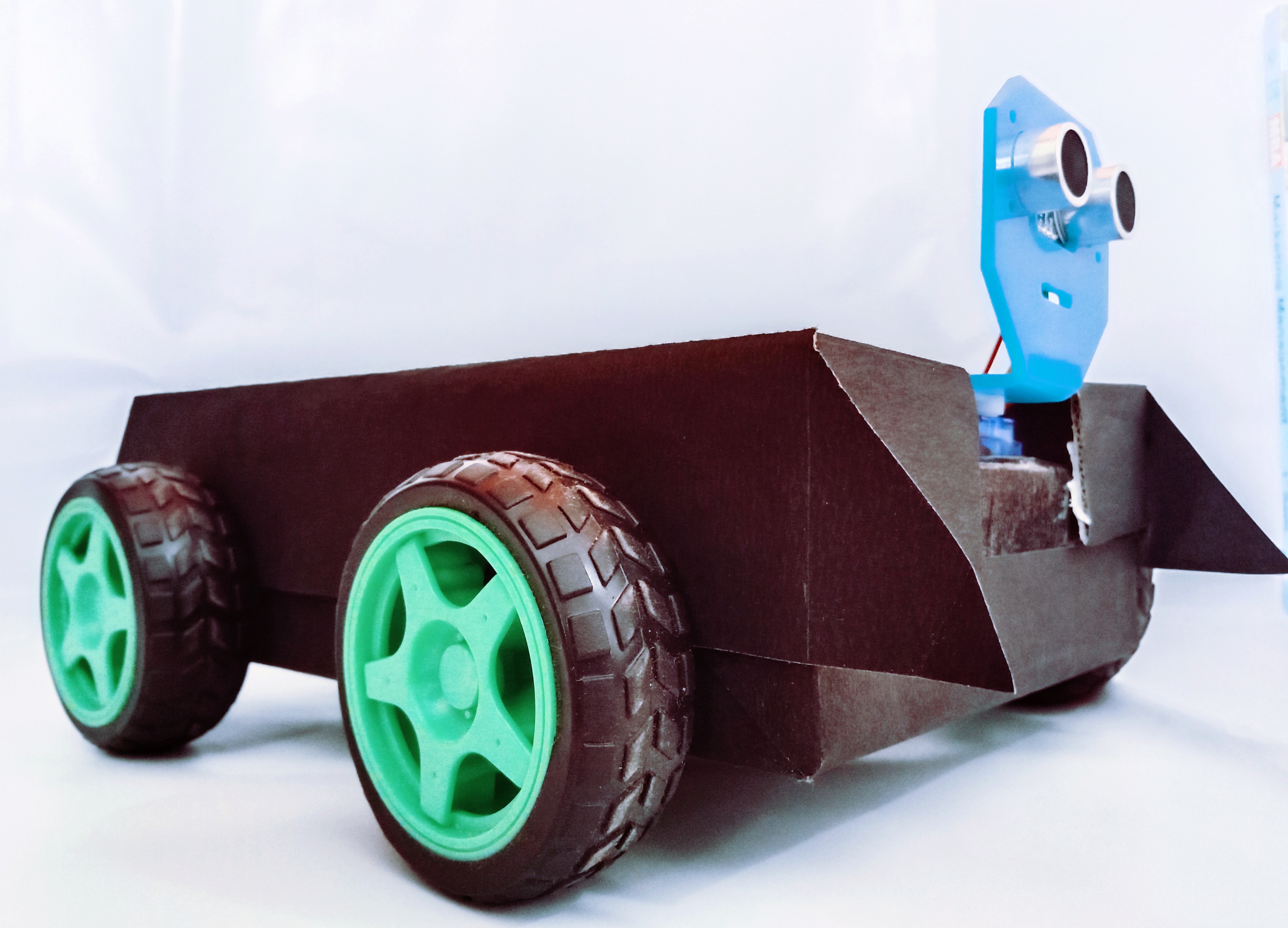
Here, We will learn How to make a "OBSTACLE AVOIDING CAR".
Car uses 4 BO Motors, 4 Wheels, Arduino, Motor Driver, Servo Motor, Ultrasonic Sensor, etc.
I am to going explain each and every step, but I think You can learn better through a Video.
So, I am going to explain everything using Video.
Watch it & You can Subscribe us for More learning Videos.
You can take any box according to your convenience and also you can decorate it. It's all your Choice.
1 / 3


{kind=link}
Comments