In this project I will show you how to build a line following robot step by step easily.
This project is very basic and I think everyone who has electronics project as hobby they have at least once wanted to build this kind of car/toys/robot in their mind. It was long time ago I really want to build this robot, and finally just now I can make it happen. Thanks to all the posted on the internet.
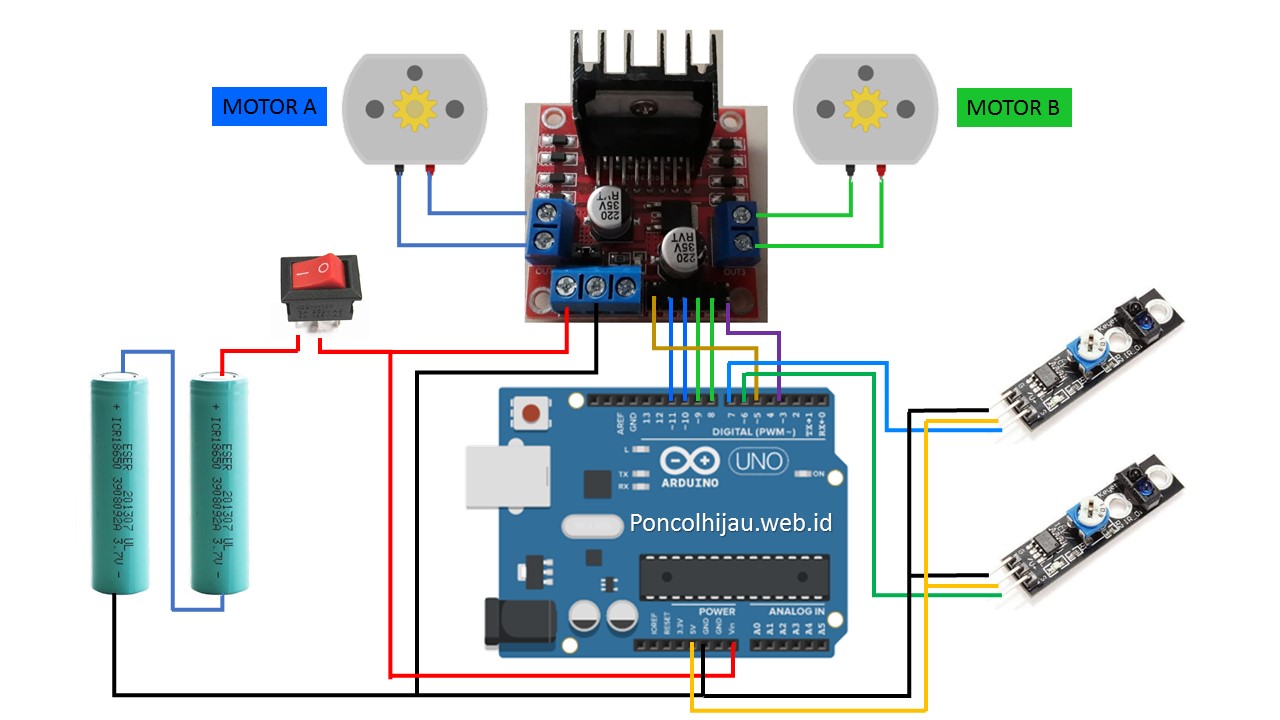
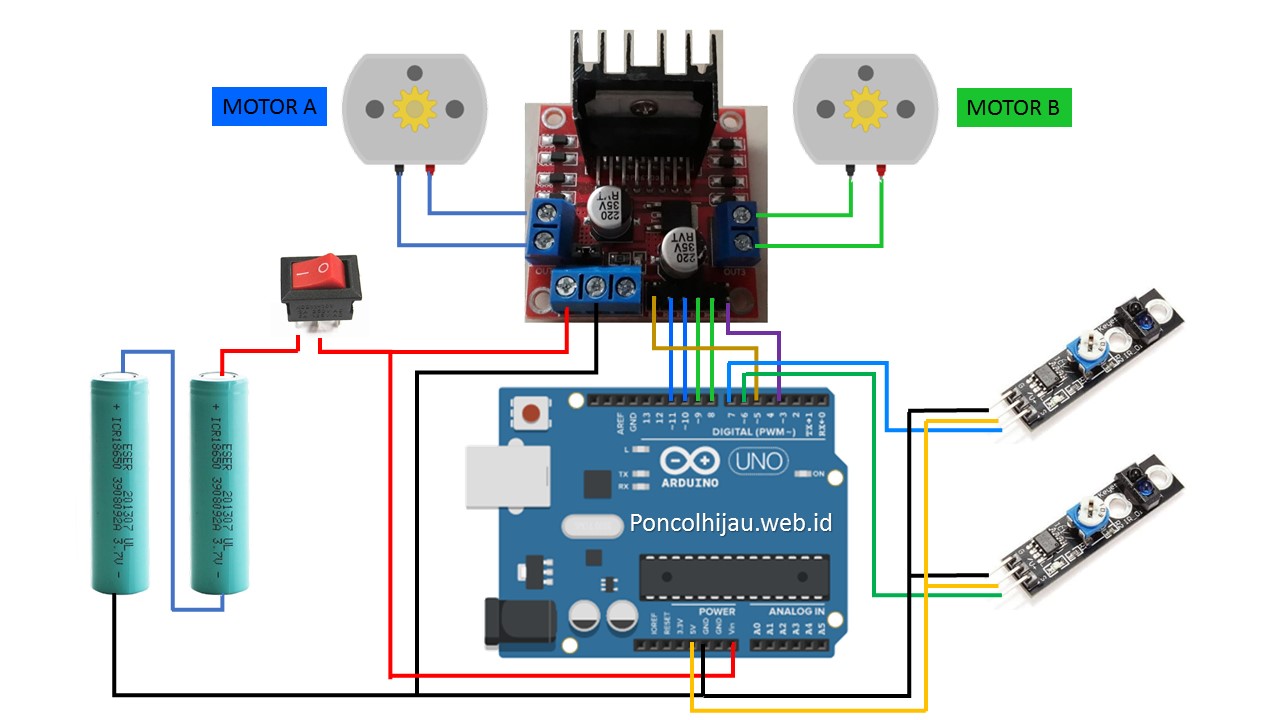
So, this car/robot will follow the contrass-colored line on the floor wherever it goes. The sensors are detecting the color, the arduino processing the read of sensors, and then tell the motors to move as it is. I assume many people has already knew the working principle of this car.
Please take a look at the video that I've been uploaded




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)













_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.