I wanted a manual weapon aiming systemAs most of us I went for servo based aiming, but when I plugged the standard method of directly converting the position of the analog joystick to the position of servo I realized quickly it has it's cons.
Direct control is great for steering and quick action e.g. spray type shooting, but it's not precise enough for a carefully aimed sniper shots.
So what's the alternative? Well an alternative could be a motion system which depending on the position of the analog increments or decrements the position of the servo.
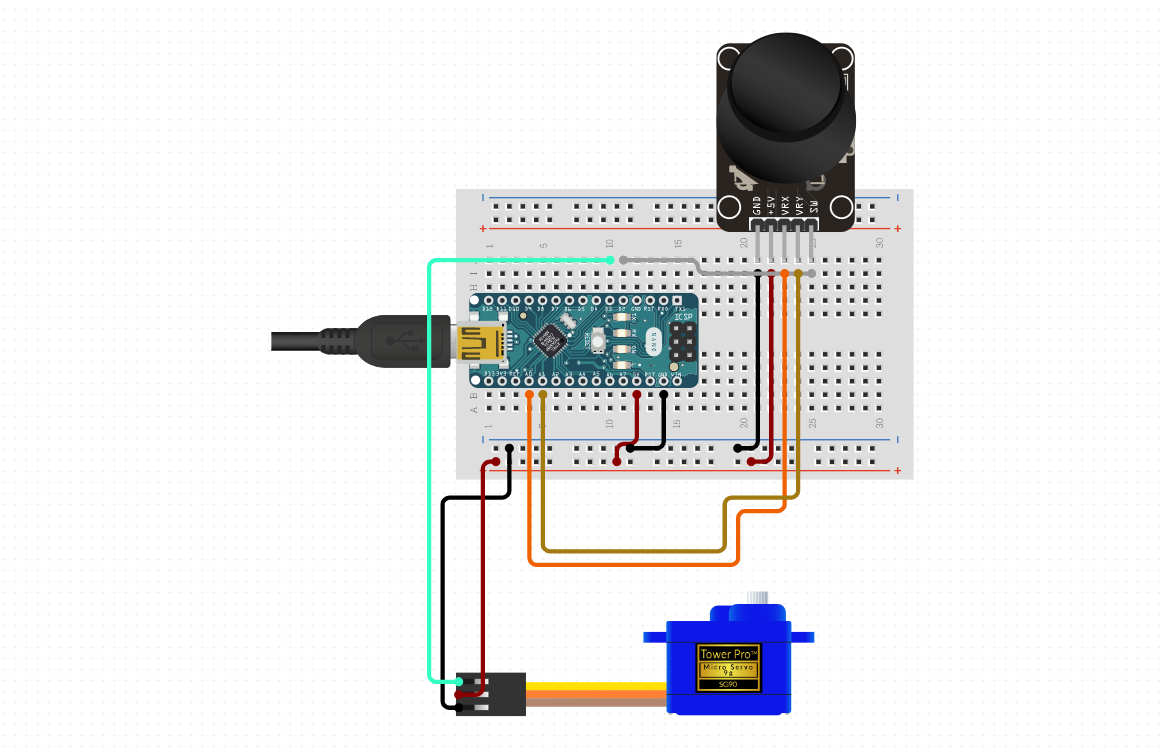
My analog joystick also has a click in button, which I decided will be used to switch between two systems.
In the example below I will be using just one servo, to demonstrate the concept and aiming on one plane, but another servo can be easily implemented to make it a 3d aiming system.
This simple and smooth code runs really well without much delay. You can see the effects in the video below.








{kind=link}

Comments
Please log in or sign up to comment.