#include <Servo.h>
Servo servo;
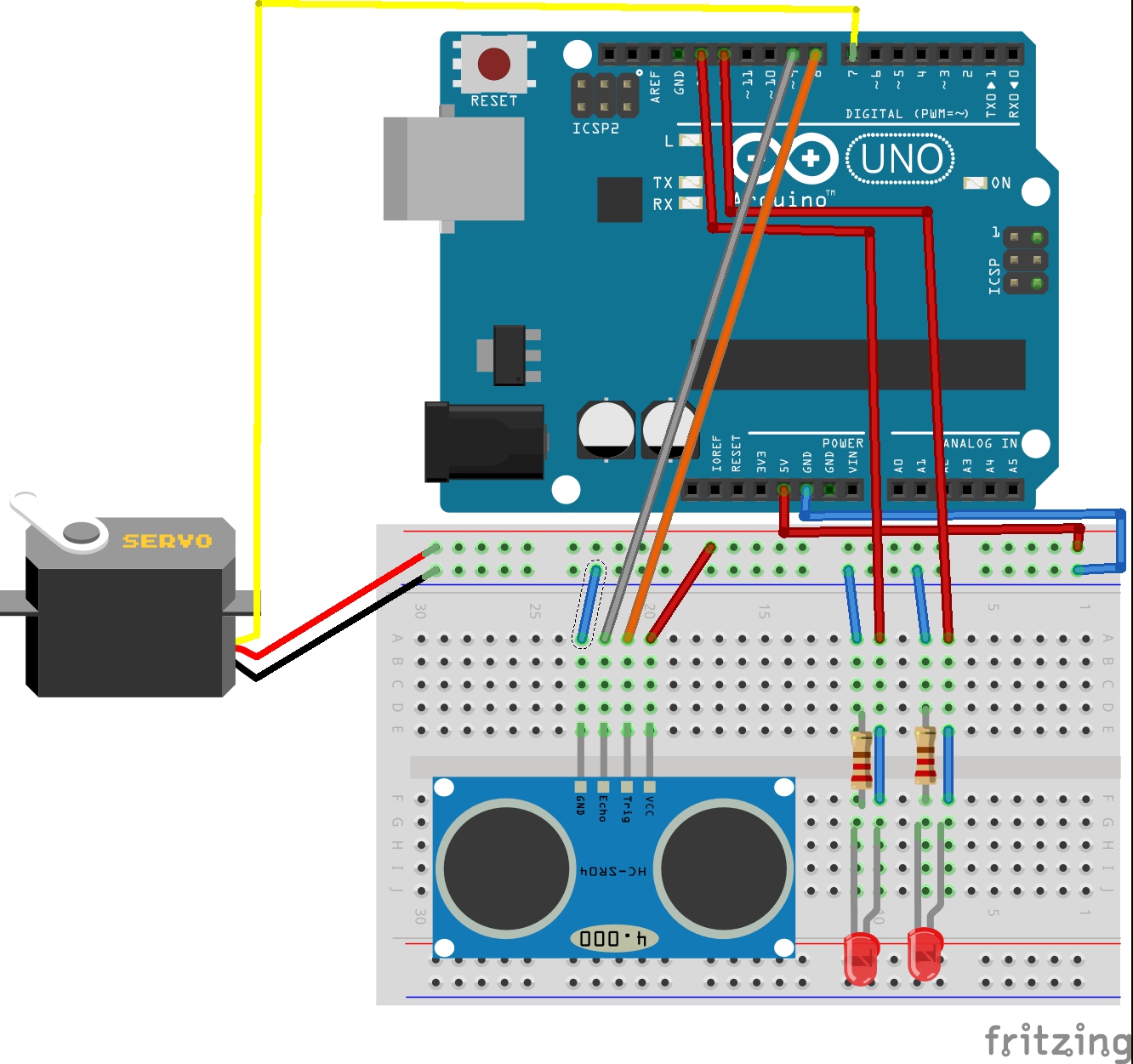
int trigPin = 9;
int echoPin = 8;
long distance;
long duration;
void setup() {
Serial.begin(9600);
servo.attach(7);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(13, OUTPUT);
pinMode(12, OUTPUT);
Serial.print("I'm watting");
}
void loop() {
ultra();
Serial.print(" 거리 :");
Serial.println(distance);
delay(50);
if(distance <= 30){
analogWrite(12,250);
servo.write(30);
delay(500);
servo.write(0);
delay(500);
analogWrite(12,0);
}
analogWrite(13,250);
delay(500);
analogWrite(13,0);
servo.write(0);
delay(500);
}
void ultra(){
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculating the distance
distance= duration*0.034/2;
}





_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







{kind=link}
Comments
Please log in or sign up to comment.