



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 12 | |||
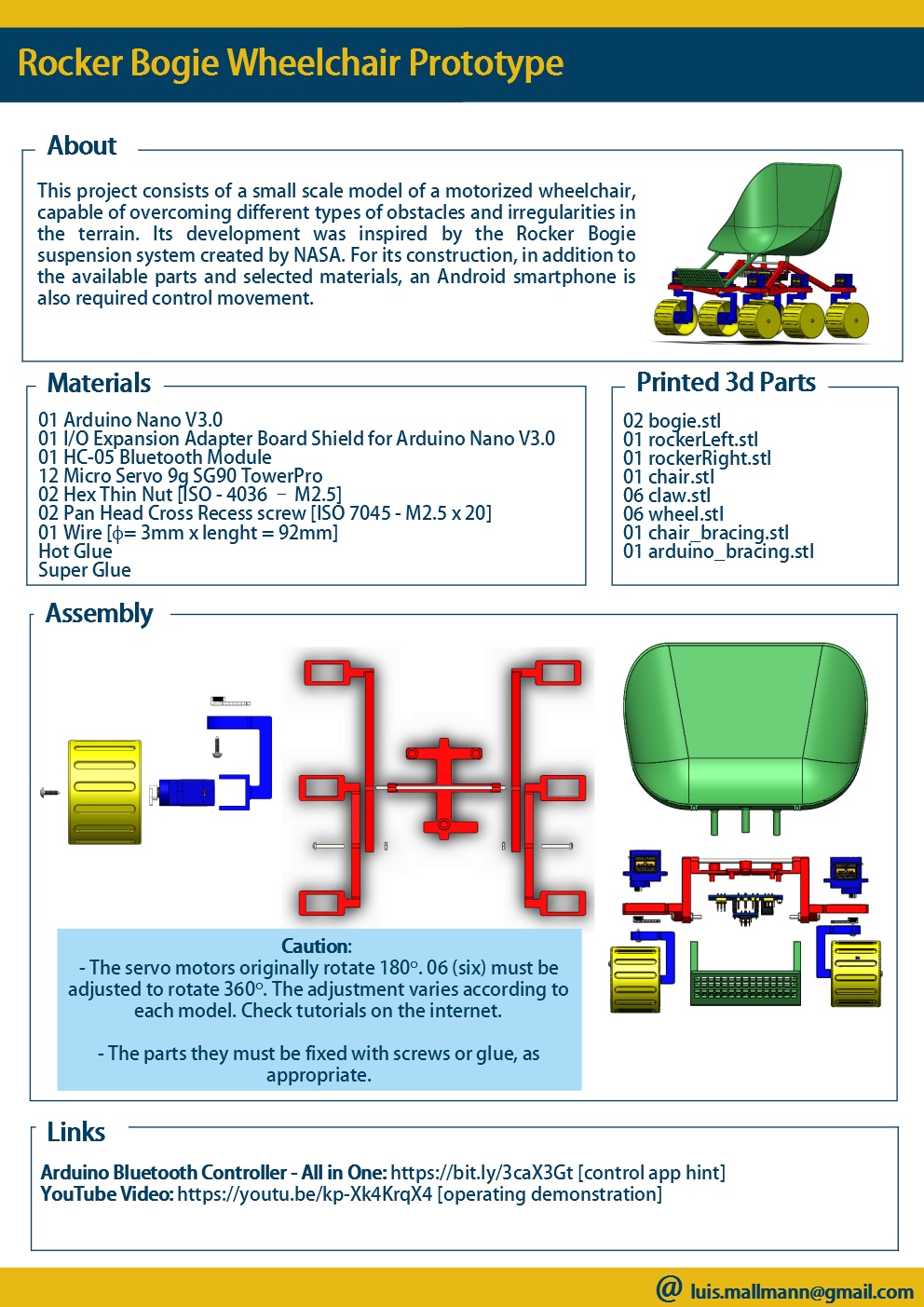
This project consists of a small scale model of a motorized wheelchair,
capable of overcoming different types of obstacles and irregularities in
the terrain. Its development was inspired by the Rocker Bogie
suspension system created by NASA. For its construction, in addition to
the available parts and selected materials, an Android smartphone is
also required control movement.






{kind=link}
Comments
Please log in or sign up to comment.