


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
 |
| |||||
[Work in Progress - Project Still in development Phase]
Problem StatementPhysically challenged peoples and Elderly persons faces numerous challenges in their daily life. For example an elderly person who's usually bedridden and with limited speech ability want to use day to day life household appliances like Fan, AC, Cooler, Heater, Light Bulbs, TV etc. But, these all devices comes with different remotes of each, its very hard for such peoples to identify, remember and press the exact buttons to operate these things.
I want to build a system which will use Capsense technology, means, touch based gestures to operate household appliances like Fan, AC, Cooler, Heater, Light Bulbs, TV etc. Since touch Gestures and Patterns can be more simple, easy and effortless than identifying tiny buttons and reading the microscopic texts written on them. Today, thanks to technological advances, many disadvantaged and disabled individuals and also elderly peoples, are able to use technology to make their lives easier and more livable. One promising area is speech recognition. This technology is at the heart of personal voice assistants like Siri, Amazon Echo, and Google, that we’ve become accustomed to using either on our smartphones or through a smart speaker in our home. But what about peoples with speech impairment? These existing technologies services are limited to provide assistance to specific groups of disabilities. The major problem with this Voice assistants is bad Speech recognition. As we know "Disabilities" is an umbrella term, covering impairments, activity limitations, and participation restrictions. It is very difficult to cover all these with one specific System implementation. I want to build the solution which "feel" more "General" and "Friendly" to most of the physically challenged persons.
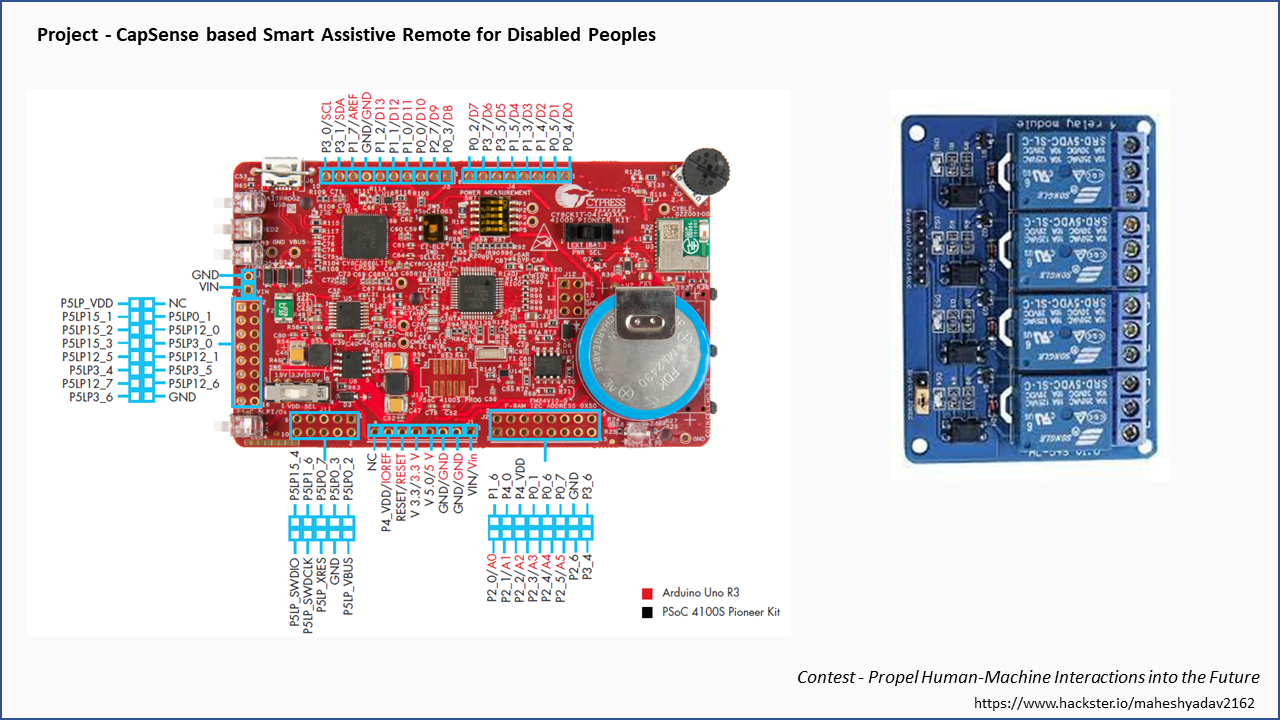
Proposed Block DiagramProposed system will consist two hardwares, One is Remote and other is control hub. Capsense Remote - will use PSoC 4100S Pioneer kit to identify specific touch gestures, like for example, Drawing pattern/gesture on touch panel will enter the mode of Fan control, On/Off, speed adjustment etc. And using two available buttons we can programmed to + or - the speed of fan. OR we can also use buttons to enter into adjustment mode and additional touch gesture for precision fan speed control. Like wise we can control other different household appliances like AC, Cooler, Heater, Light Bulbs, TV etc. PSoC 4100S Pioneer kit has Bluetooth Connectivity feature so we can send the control signals to control hub. Control hub - will be Arduino/ESP32 based Bluetooth enabled system. We will connect all the appliances to this hardware. Control hub will act as a Bluetooth receiver. Once Remote and Control hub will get paired over Bluetooth. We can operate and control the connected appliances as per Capsense remote's commands.
Project work completed so far -
1. Gesture Detection - Completed
There is example template for Gesture Detection in PSoC documentation/Code Repository :(tested for both CSD and CSX).
Following Figure Shows the top-design of the CSX and CSD PSoC Creator project.
CE224821_PSoC4_CapSense_Touchpad_Gestures_CSX01/CSD01
2. Custom Gestures - Work in Progress
Tuning/Customizing above Gesture detection example for detecting custom gestures/Other than default cypress PSoC
3. BLE connection with slave device - ESP32 (Pending)
PSoC4 BLE – UART-BLE - This example demonstrates how to use PSoC4 BLE device as a UART-BLE bridge. I wanted to modify it to connect with ESP32, but still not got luck.




{kind=link}
Comments
Please log in or sign up to comment.