


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
| ||||||
| ||||||
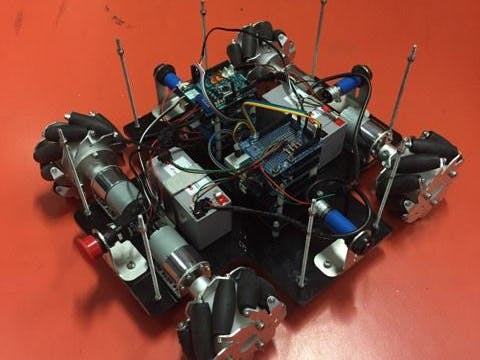
NAMLA has:
Read more- Manual Control: It can be controlled via joystick.
- PTP, Point to Point: It can go from initial point to destination through the shortest route.
1 / 2
- Obstacle Avoidance: It can play a maze game.
- Path Planning: The maps of a certain location can be imported to the robot.
//This sketch created by Dimitris Kagioulis.You can modify it at your need.
//Library belongs to Kristian Sloth Lauszus
#include <PS3BT.h>
#include <Wire.h>
USB Usb;
BTD Btd(&Usb);
PS3BT PS3(&Btd);
int sensor1 = A0;
int sensor2 = A1;
int sensor3 = A2;
void setup() {
Serial.begin(9600);
Wire.begin(); // 0 adress of Master
if (Usb.Init() == -1) {
Serial.print(F("\r\nOSC did not start"));
while (1); //halt
}
pinMode(sensor1, INPUT);
pinMode(sensor2, INPUT);
pinMode(sensor3, INPUT);
}
void loop()
{
long safety1 = digitalRead(sensor1);
long safety2 = digitalRead(sensor2);
long safety3 = digitalRead(sensor3);
Usb.Task();
char c = Serial.read();
if (PS3.PS3Connected || PS3.PS3NavigationConnected) {
if (PS3.getButtonPress(UP)) {
if(safety1 == LOW){
Wire.beginTransmission(1); // transmit to device #1
Wire.write( 'A' );
Wire.endTransmission(); // stop transmitting
Wire.beginTransmission(2); // transmit to device #2
Wire.write( 'A' );
Wire.endTransmission(); // stop transmitting
}
else if (safety1 == HIGH){
Wire.beginTransmission(1); // transmit to device #1
Wire.write( 'C' );
Wire.endTransmission(); // stop transmitting
Wire.beginTransmission(2); // transmit to device #2
Wire.write( 'C' );
Wire.endTransmission(); // stop transmitting
}
}
else if (PS3.getButtonPress(DOWN)) {
Wire.beginTransmission(1); // transmit to device #1
Wire.write( 'B' );
Wire.endTransmission(); // stop transmitting
Wire.beginTransmission(2); // transmit to device #2
Wire.write( 'B' );
Wire.endTransmission(); // stop transmitting
}
else if (PS3.getButtonPress(RIGHT)) {
if(safety2 == LOW){
Wire.beginTransmission(1); // transmit to device #1
Wire.write( 'D' );
Wire.endTransmission(); // stop transmitting
Wire.beginTransmission(2); // transmit to device #2
Wire.write( 'D' );
Wire.endTransmission(); // stop transmitting
}
else if (safety2 == HIGH){
Wire.beginTransmission(1); // transmit to device #1
Wire.write( 'C' );
Wire.endTransmission(); // stop transmitting
Wire.beginTransmission(2); // transmit to device #2
Wire.write( 'C' );
Wire.endTransmission(); // stop transmitting
}
}
else if (PS3.getButtonPress(LEFT)) {
if(safety3 == LOW){
Wire.beginTransmission(1); // transmit to device #1
Wire.write( 'E' );
Wire.endTransmission(); // stop transmitting
Wire.beginTransmission(2); // transmit to device #2
Wire.write( 'E' );
Wire.endTransmission(); // stop transmitting
}
else if (safety3 == HIGH){
Wire.beginTransmission(1); // transmit to device #1
Wire.write( 'C' );
Wire.endTransmission(); // stop transmitting
Wire.beginTransmission(2); // transmit to device #2
Wire.write( 'C' );
Wire.endTransmission(); // stop transmitting
}
}
else if (PS3.getButtonPress(CIRCLE)) {
Wire.beginTransmission(1); // transmit to device #1
Wire.write( 'F' );
Wire.endTransmission(); // stop transmitting
Wire.beginTransmission(2); // transmit to device #2
Wire.write( 'F' );
Wire.endTransmission(); // stop transmitting
}
else if (PS3.getButtonPress(SQUARE)) {
Wire.beginTransmission(1); // transmit to device #1
Wire.write( 'G' );
Wire.endTransmission(); // stop transmitting
Wire.beginTransmission(2); // transmit to device #2
Wire.write( 'G' );
Wire.endTransmission(); // stop transmitting
}
else
{
Wire.beginTransmission(1); // transmit to device #1
Wire.write( 'C' );
Wire.endTransmission(); // stop transmitting
Wire.beginTransmission(2); // transmit to device #2
Wire.write( 'C' );
Wire.endTransmission(); // stop transmitting
}
if (PS3.PS3Connected) {
if (PS3.getButtonClick(PS)) {
PS3.disconnect();
}
}
}
}
// Start the I2C Bus as Slave 1
#include <Wire.h>
void setup()
{
Wire.begin(1); // Adress 1
Wire.onReceive(reciveEvent);
//Setup Channel A
pinMode(12, OUTPUT); //Initiates Motor Channel A pin
pinMode(9, OUTPUT); //Initiates Brake Channel A pin
//Setup Channel B
pinMode(13, OUTPUT); //Initiates Motor Channel A pin
pinMode(8, OUTPUT); //Initiates Brake Channel A pin
}
void loop()
{
}
void reciveEvent ( int howMany)
{
char c = Wire.read();
if ( c == 'A')
{
//Motor A forward @ full speed
digitalWrite(12, HIGH); //Establishes forward direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B forward @ full speed
digitalWrite(13, HIGH); //Establishes forward direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'B')
{
//Motor A backword @ full speed
digitalWrite(12, LOW); //Establishes backword direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B backword @ full speed
digitalWrite(13, LOW); //Establishes backword direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'D')
{
//Motor A backword @ full speed
digitalWrite(12, LOW); //Establishes backword direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B backword @ full speed
digitalWrite(13, HIGH); //Establishes backword direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'E')
{
//Motor A backword @ full speed
digitalWrite(12, HIGH); //Establishes backword direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B backword @ full speed
digitalWrite(13, LOW); //Establishes backword direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'F')
{
//Motor A backword @ full speed
digitalWrite(12, LOW); //Establishes backword direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B backword @ full speed
digitalWrite(13, HIGH); //Establishes backword direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'G')
{
//Motor A backword @ full speed
digitalWrite(12, HIGH); //Establishes backword direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B backword @ full speed
digitalWrite(13, LOW); //Establishes backword direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'C')
{
digitalWrite(8, HIGH); //Engage the Brake for Channel B
digitalWrite(9, HIGH); //Engage the Brake for Channel A
}
}
// Start the I2C Bus as Slave 2
#include <Wire.h>
void setup()
{
Wire.begin(2); // Adress 2
Wire.onReceive(reciveEvent);
//Setup Channel A
pinMode(12, OUTPUT); //Initiates Motor Channel A pin
pinMode(9, OUTPUT); //Initiates Brake Channel A pin
//Setup Channel B
pinMode(13, OUTPUT); //Initiates Motor Channel A pin
pinMode(8, OUTPUT); //Initiates Brake Channel A pin
}
void loop()
{
}
void reciveEvent ( int howMany)
{
char c = Wire.read();
if ( c == 'A')
{
//Motor A forward @ full speed
digitalWrite(12, HIGH); //Establishes forward direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B forward @ full speed
digitalWrite(13, HIGH); //Establishes forward direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'B')
{
//Motor A backword @ full speed
digitalWrite(12, LOW); //Establishes backword direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B backword @ full speed
digitalWrite(13, LOW); //Establishes backword direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'D')
{
//Motor A backword @ full speed
digitalWrite(12, LOW); //Establishes backword direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B backword @ full speed
digitalWrite(13, HIGH); //Establishes backword direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'E')
{
//Motor A backword @ full speed
digitalWrite(12, HIGH); //Establishes backword direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B backword @ full speed
digitalWrite(13, LOW); //Establishes backword direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'F')
{
//Motor A backword @ full speed
digitalWrite(12, HIGH); //Establishes backword direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B backword @ full speed
digitalWrite(13, LOW); //Establishes backword direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'G')
{
//Motor A backword @ full speed
digitalWrite(12, LOW); //Establishes backword direction of Channel A
digitalWrite(9, LOW); //Disengage the Brake for Channel A
analogWrite(3, 200); //Spins the motor on Channel A at full speed
//Motor B backword @ full speed
digitalWrite(13, HIGH); //Establishes backword direction of Channel B
digitalWrite(8, LOW); //Disengage the Brake for Channel B
analogWrite(11, 200); //Spins the motor on Channel B at full speed
}
else if ( c == 'C')
{
digitalWrite(8, HIGH); //Engage the Brake for Channel B
digitalWrite(9, HIGH); //Engage the Brake for Channel A
}
}




{kind=link}
Comments
Please log in or sign up to comment.