


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
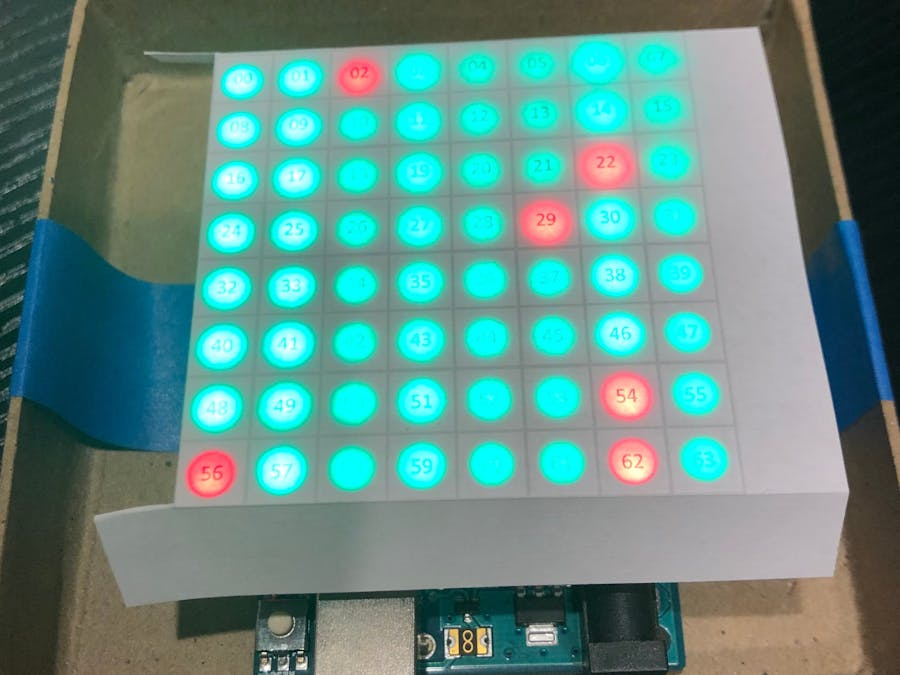
The project uses the Arduino random number generator library to (psuedo) randomly select numbers between 0 and 63. Selected number is illuminated on the LED matrix.
Once a predetermined percent of the total array size (of 64) has been randomly selected at least once, the cycle is deemed complete. LED matrix with then light the selected numbers in green and the numbers not selected the time in red for a a few seconds before starting the whole process again.
Commands via the Serial Monitor can be sent to set the percentage and other selected parameters.
This was a (hopefully) fun project to learn the Colorduino Library and to experiment with the random number library as well.
//Scott Mangiacotti
//Marlborough, Massachusetts USA
//August 2019
//DW1
//8x8 LED Matrix Random Number Display
#include <Time.h>
#include <TimeLib.h>
#include <Colorduino.h>
//Global constants
int const ARRAY_SIZE = 64;
//Global variables
bool gSystemEnabled = false;
bool gSystemPaused = false;
bool gVerboseMessages = false;
int gDutyCycle = 25;
unsigned long gTimeSnapshot = 0;
float gTargetPercent = 0.90;
long gRnd;
int gDistro[ARRAY_SIZE];
bool gToggle = false;
void setup()
{
//Initialize LED array
Colorduino.Init();
initializeDistroArray();
//Open a serial port
Serial.begin(9600);
//Setup
postAppData();
//Startup enabled
ableSystem(true);
}
void loop()
{
//Serial port processing
if (Serial.available() > 0)
{
int iControlCode;
iControlCode = Serial.parseInt();
processMessage(iControlCode);
}
//Determine what to do based on enable status
if (gSystemEnabled == true && gSystemPaused == false)
{
randomize();
}
else if (gSystemEnabled == true && gSystemPaused == true)
{
processPauseState();
}
//Give back processing time
delay(gDutyCycle);
}
void randomize()
{
//Initialize randomization
long lSeed;
lSeed = (long)second() * (long)minute() * (long)hour() * (long)weekday() * (long)analogRead(0);
//Comment out one of the two following lines to experiment with different entropy for pseudo-randomness
//randomSeed(lSeed);
randomSeed(micros());
int iDiv;
int iModulo;
//Randomly select an LED to energize every other scan
gToggle = !gToggle;
if (gToggle == true)
{
gRnd = random(0, 64); //designed for 8x8 RGB Matrix
incrementDistroArray(gRnd);
iDiv = gRnd / 8;
iModulo = gRnd % 8;
Colorduino.SetPixel(iDiv, iModulo, 0, 0, 255);
}
else
{
Colorduino.ColorFill(0, 0, 0);
}
//Paint
Colorduino.FlipPage();
//Results
float fRes;
fRes = checkDistroArrayResults();
//Check if we reached the target coverage
if (fRes >= gTargetPercent)
{
coverageResultsAchieved(fRes);
gTimeSnapshot = millis();
}
}
void initializeDistroArray()
{
//Iterate
for (int i=0; i<ARRAY_SIZE; i++)
{
gDistro[i] = 0;
}
//Post results
Serial.println("Array distribution list initialized");
}
void incrementDistroArray(int iIndex)
{
//Validate
if (iIndex < 0 || iIndex >= ARRAY_SIZE)
{
return;
}
//Increment
gDistro[iIndex]++;
//Post results
if (gVerboseMessages == true)
{
Serial.print("Distro array index: ");
Serial.print(iIndex);
Serial.print(". New value: ");
Serial.println(gDistro[iIndex]);
}
}
//Return value in decimal. 14% to be returned as 0.14
float checkDistroArrayResults()
{
int iCount;
float fResult;
//Initialize
iCount = 0;
//Iterate
for (int i=0; i<ARRAY_SIZE; i++)
{
if (gDistro[i] > 0)
{
iCount++;
}
}
//Check results
fResult = ((float)iCount/(float)ARRAY_SIZE);
if (gVerboseMessages == true)
{
Serial.print("Success count: ");
Serial.print(iCount);
Serial.print(". Percent: ");
Serial.println(fResult);
}
return fResult;
}
void coverageResultsAchieved(float fResPct)
{
//ilmo
int iDiv;
int iModulo;
//Clear display in prep for displaying results
Colorduino.ColorFill(0, 0, 0);
Colorduino.FlipPage();
//Iterate
for (int i=0; i<ARRAY_SIZE; i++)
{
//Determine row and column from array index
iDiv = i / 8;
iModulo = i % 8;
//Illuminate LED
if (gDistro[i] > 0)
{ //green this value was randomly selected
Colorduino.SetPixel(iDiv, iModulo, 0, 255, 0);
}
else
{ //red this value was not randomly selected
Colorduino.SetPixel(iDiv, iModulo, 255, 0, 0);
}
}
//Paint
Colorduino.FlipPage();
//Post results
Serial.print(fResPct * 100.00);
Serial.println("% coverage achieved. Pausing system.");
//Pause
gSystemPaused = true;
}
void processPauseState()
{
unsigned long lNow;
unsigned long lDelta;
//Initialize
lNow = millis();
//Calculate time difference in milliseconds
lDelta = lNow - gTimeSnapshot;
//Compare
if (lDelta > 14000) //14000 milliseconds or 14 seconds
{
initializeDistroArray();
gSystemPaused = false;
Serial.println("Pause time expired. Restart Randomizing");
}
}
void ableSystem(bool bEnable)
{
if (bEnable == true)
{
//ilmoReset all counters in preparation for starting
initializeDistroArray();
Colorduino.ColorFill(0, 0, 0);
//Set parameters as needed
gSystemEnabled = true;
gSystemPaused = false;
//Post results
Serial.print("System enabled. Target: ");
Serial.print(gTargetPercent*100.00);
Serial.println("%");
}
else
{
//Disable system
gSystemEnabled = false;
gSystemPaused = false;
Colorduino.ColorFill(0, 0, 0);
//Post results
Serial.println("System disabled");
}
//Paint
Colorduino.FlipPage();
}
//Read data from serial port and process message from user
//Format is: XXnnnn
//XX is a value between 1 - 32 and represents the command type or area (for example manual commands to the HOUR servo motor)
//nnnn is a value between 0-1000 and represents the value for the target command type
//For example, 01180 is type 02 and value 180. It represents HOUR servo motor move to position 180 degrees
//See documentation for command definitions and value ranges
void processMessage(int iMessage)
{
int iControlCode;
int iControlValue;
//Process the serial port message
if (iMessage > 0)
{
iControlCode = iMessage / 1000;
iControlValue = iMessage % 1000;
}
//Misc control and command codes
if (iControlCode == 10)
{
if (iControlValue == 0)
{
postAppData();
}
//Control codes and commands
else if (iControlValue == 1)
{
if (gSystemEnabled == false)
{
ableSystem(true);
}
else
{
Serial.println("System already enabled");
}
}
else if (iControlValue == 2)
{
ableSystem(false);
}
else if (iControlValue == 3)
{
gVerboseMessages = !gVerboseMessages;
if (gVerboseMessages == false)
{
Serial.println("Verbose mode disabled");
}
else
{
Serial.println("Verbose mode enabled");
}
}
else if (iControlValue == 4)
{ //report all settings
Serial.print("Target percent = ");
Serial.print(gTargetPercent*100.00);
Serial.println("%");
//Iterate array ilmo
for (int i=0; i<ARRAY_SIZE; i++)
{
Serial.print("LED[");
Serial.print(i);
Serial.print("] = ");
Serial.println(gDistro[i]);
}
}
else
{
Serial.print("Invalid Control Value: ");
Serial.println(iControlValue);
}
}
if (iControlCode == 11)
{ //New Target Percent
if (iControlValue >= 10 && iControlValue <= 100)
{
gTargetPercent = (float)iControlValue / 100.0;
Serial.print("Target percent changed to: ");
Serial.print(gTargetPercent*100);
Serial.println("%");
}
else
{
Serial.print("New Target Percent Value out of range: ");
Serial.println(iControlValue);
}
}
//Draw separator
Serial.println("-----");
}
void postAppData()
{
Serial.println("DW1");
Serial.println("8x8 LED Matrix Random Number Display");
Serial.println("By Scott Mangiacotti");
Serial.println("Marlborough, Massachusetts USA");
Serial.println("August 2019");
}




Comments
Please log in or sign up to comment.