This is a data visualization partner project based on the theme of struggle. This project is set in a 13" x 13" x 13" cardboard box modeled like a student's bedroom to represent the struggle with a heavy school workload and caffeine. The work was split up amongst partners as electronics and art.
Data
The data being visualized comes from the Finnhub Stock API (https://finnhub.io/) and is the stock prices of Celsius, Monster, and Starbucks. This data was used as an indirect way to measure how much students are being affected by caffeine on a given day.
Visualization
For visualization, three LED strips and a continuous motion servo are used. Each strip has three LEDs and represents one of these stock prices. The better a stock performs on a given day, the more LEDs will light up along its corresponding strip.
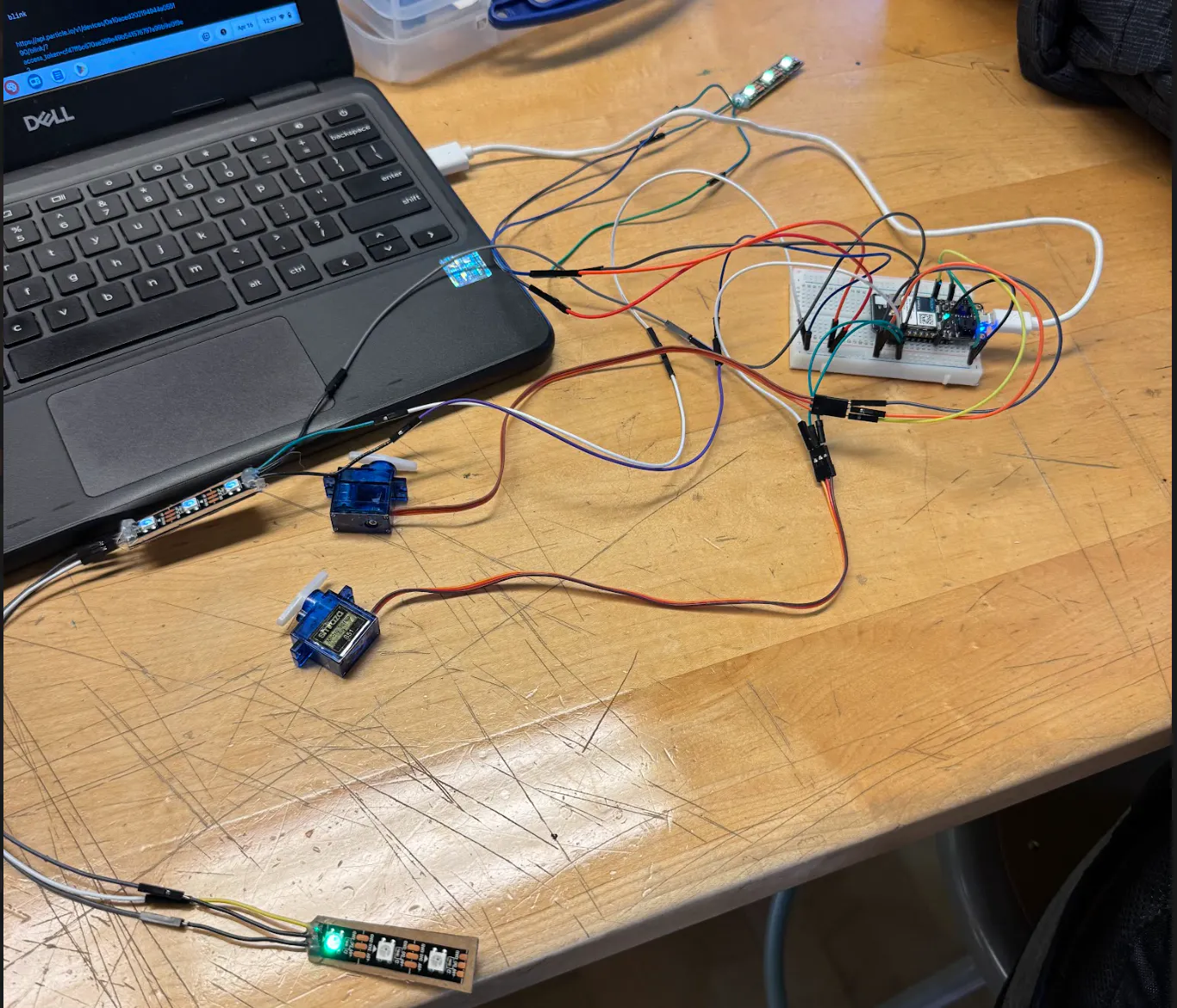
An early test for the LED strips and servos
Early LED and Servo Test
The continuous motion servo (on the right) is used to drive the minute hand on a makeshift clock. The better the stocks perform, the faster the servo spins, indicating that students are spending longer hours working, often late at night. The micro servo is used to drive the motion of a nodding head, which is done for added effect to show the student's exhaustion. This will be clearer later.
Electronics Construction
1 / 7 • First test of using an LED strip and two servos
Sculpture (Art) Construction
1 / 9 • Lightning bolt paper cut out
Head Nodding Mechanism
The nodding head was achieved by attaching a fishing line to the back of the student's head, which went through a hole in the torso and out of the box. The mini servo was placed just outside the box where the fishing line came out and was used to slowly give slack and then quickly pull on the fishing line. This had the effect of slowly lowering the head and snapping it back in place, mimicking someone who is fighting sleep.
A conceptual demonstration of the mechanism
Clock Mechanism
Instead of using gears, this makeshift clock was constructed by using a plastic rod and attachment to the continuous motion servo, a wooden stick, a rubber band, a bearing, a pencil, and yarn. The minute hand is attached to the end of the stick, which extends outside of the box. A rubber band is pulled taut across the stick and plastic rod servo attachment. Thus, when the servo spins, the rubber band will act as a belt and spin the stick, which means the minute hand turns. A pencil and yarn loops support the stick and rod to keep them level and help them spin smoothly.
1 / 2 • Initial minute hand mechanism
The initial clock mechanism in motion
The first and final minute-hand mechanisms effectively do the same thing. The extra supports are a result of previous attempts at getting the hour hand to spin successfully, which will be gone over in the Limitations and Shortfalls section.
Final Project
Final Working Video
Rotating Through the Different States
Rotating through the different states
Limitations and Shortfalls
Data: The data being pulled is the most recent stock prices of Celsius, Monster, and Starbucks. Using a range, the values are then mapped to other values appropriate for how many LEDs should light up or how fast a motor should spin. However, if these stock prices consistently fall out of the set range, the visualization for this data will remain constant and not accurately represent the data. A possible solution would be to get data on the percentage increase or decrease of these stock prices. This would eliminate the need for a range of expected values, and thus ensure that the visualization consistently represents the data accurately.
Clock: The original goal for the clock was to have both the hour and the minute hands work. The minute hand worked well enough on its own, however, difficulties arose when trying to work with the hour hand due to the overall placement of the servo and tape roll (which would act to spin the hour hand as the wooden stick spun the minute hand).
1 / 3 • Initial mechanism for the hour hand
One of the main problems that arose with getting the hour hand to work was that the rubber band for it would slip off the tape roll/cardboard it was meant to loop around. This was due to slightly uneven rotating surfaces as the rod attached to the servo was a spiral like a screw, and not flat. Another issue was the excess tension that the rubber bands would place on the rod, often causing it to break off from the servo during testing. This was largely fixed using the yarn supports.
One of the first attempts at getting the hour hand to work
Attempt to make the rubber band more vertical and to provide support
Final attempt with both the minute and hour hands
A possible solution that would result in both clock hands spinning would involve careful reconsideration and reconstruction with stronger materials, such as plastic, of the mechanisms for each hand. With each passing attempt, any additions were more or less band-aids piled on top of one another.
Signal pins are as follows Micro servo: D1 Continuous motion servo: A2 Single LED strip: D2 2 LED strips in series: MOSI
All components need to be connected to ground and power. A ground and power rail were made. Connect the ground rail to GND on the photon and the negative terminal on the external power cord. Connect the power rail to VUSB on the photon and the positive terminal on the external power cord.
The code pulls data from the mentioned API and triggers the components to run either when it is between the hours of 13:00 and 14:00, or by manually triggering an event called "blink".
// This #include statement was automatically added by the Particle IDE.#include<ArduinoJson.h>// This #include statement was automatically added by the Particle IDE.#include<neopixel.h>// This #include statement was automatically added by the Particle IDE.#include<ArduinoJson.h>#include"Particle.h"SYSTEM_MODE(AUTOMATIC);SerialLogHandlerlogHandler(LOG_LEVEL_INFO);#if (PLATFORM_ID == 32)// MOSI pin MO#define PIXEL_PIN SPI1// MOSI pin D2// #define PIXEL_PIN SPI1#else // #if (PLATFORM_ID == 32)//#define PIXELB_PIN D3#define PIXEL_PIN D2#endif//#define PIXEL_COUNT 7//#define PIXEL_TYPE WS2812BAdafruit_NeoPixelstripCelcius(3,PIXEL_PIN,WS2812B);#if (PLATFORM_ID == 32)#define PIXELB_PIN SPI#else#define PIXELB_PIN MOSI#endifAdafruit_NeoPixelstripMonster(6,PIXELB_PIN,WS2812B);uint32_tWheel(byteWheelPos);StringjsonText="";JsonDocumentdoc;doublecelciusPrice;doublemonsterPrice;doublestarbucksPrice;intcounter=0;intstate=0;//0 = off, 1 = onServonoddingServo;doublek=97.0;boolisMoving=false;unsignedlongpreviousMillis=0;longinterval=100;doublefactor;ServoclockServo;booltimeFlag=false;voidsetup(){stripCelcius.begin();stripCelcius.show();// Initialize all pixels to 'off'stripMonster.begin();stripMonster.show();noddingServo.attach(D1);clockServo.attach(A2);Particle.function("blink",run);pullData();Time.zone(-5);}intrun(Stringparam){Serial.println("time: ");Serial.println(Time.hour());if(state==0){pullData();factor=((((celciusPrice-25)/15)+((monsterPrice-55)/5)+((starbucksPrice-99)/16))/3);interval=100*factor;lightLEDs();startNodding();spinClock();state=1;}else{state=0;for(inti=0;i<7;i++){stripCelcius.setPixelColor(i,stripCelcius.Color(0,0,0));stripMonster.setPixelColor(i,stripMonster.Color(0,0,0));clockServo.write(93);}}stripCelcius.show();stripMonster.show();return0;}voidloop(){noddingMotion();// Call in loop to handle timingif(isMoving==false&&state==1){startNodding();}if(Time.hour()==13&&timeFlag==false){run("run");timeFlag=true;}elseif(Time.hour()!=13&&timeFlag==true){timeFlag=false;}}voidpullData(){counter=0;Particle.publish("celsiusStockPrice");Particle.subscribe("hook-response/celsiusStockPrice/0",handleEventResponse,MY_DEVICES);}voidlightLEDs(){Serial.println("lightLEDs");Serial.print("Celcius price: ");Serial.println(celciusPrice);Serial.print("Monster price: ");Serial.println(monsterPrice);Serial.print("Starbucks price: ");Serial.println(starbucksPrice);celciusPrice=mapDouble(celciusPrice,25,40,0,3);for(inti=0;i<celciusPrice;i++){stripCelcius.setPixelColor(i,255,255,0);//yellow}monsterPrice=mapDouble(monsterPrice,55,60,0,3);for(inti=0;i<monsterPrice;i++){stripMonster.setPixelColor(i,stripMonster.Color(255,0,0));//red}starbucksPrice=mapDouble(starbucksPrice,80,115,3,6);for(inti=3;i<starbucksPrice;i++){stripMonster.setPixelColor(i,0,255,0);//green}}voidnoddingMotion(){unsignedlongcurrentMillis=millis();if(isMoving){if(currentMillis-previousMillis>=interval){previousMillis=currentMillis;if(k<=150){noddingServo.write(k);k+=0.5;}else{noddingServo.write(97);// Reset to initial positionk=97;isMoving=false;// Stop motion}}}}voidstartNodding(){noddingServo.write(100);isMoving=true;}voidspinClock(){doublespeed=factor*180;intrealSpeed=map((int)speed,0,180,100,105);clockServo.write(realSpeed);}voidhandleEventResponse(constchar*event,constchar*data){jsonText=String(data);retrieveValues();}voidretrieveValues(){// The deserializeJSON method turns the JSON text object into a JsonDocument object// Note: You must retrieve the internal CONSTANT C representation of the string, c_str()DeserializationErrorerror=deserializeJson(doc,jsonText.c_str());// ---- Error handling code from ArduinoJSONif(error){Serial.print("deserializeJson() failed: ");Serial.println(error.c_str());return;}// ---- end error handlingif(jsonText!=nullptr){//Serial.println(counter);if(counter==0){celciusPrice=jsonText.toFloat();Serial.print("Celsius stock price: ");Serial.println(celciusPrice);counter++;Particle.publish("monsterStockPrice");Particle.subscribe("hook-response/monsterStockPrice/0",handleEventResponse,MY_DEVICES);}elseif(counter==1){monsterPrice=jsonText.toFloat();Serial.print("Monster stock price: ");Serial.println(monsterPrice);counter++;Particle.publish("starbucksStockPrice");Particle.subscribe("hook-response/starbucksStockPrice/0",handleEventResponse,MY_DEVICES);}elseif(counter==2){starbucksPrice=jsonText.toFloat();Serial.print("Starbucks stock price: ");Serial.println(starbucksPrice);counter=0;}}else{Serial.println("Failed to retrieve 'price' from JSON.");}}// Input a value 0 to 255 to get a color value.// The colours are a transition r - g - b - back to r.uint32_tWheel(byteWheelPos){if(WheelPos<85){returnstripCelcius.Color(WheelPos*3,255-WheelPos*3,0);}elseif(WheelPos<170){WheelPos-=85;returnstripCelcius.Color(255-WheelPos*3,0,WheelPos*3);}else{WheelPos-=170;returnstripCelcius.Color(0,WheelPos*3,255-WheelPos*3);}}//map function for doublesdoublemapDouble(doublevalue,doublefromStart,doublefromEnd,doubletoStart,doubletoEnd){if(fromEnd==fromStart){returnvalue;}return(value-fromStart)*(toEnd-toStart)/(fromEnd-fromStart)+toStart;}















{kind=link}
Comments