This project was created as an attempt to create a circle tracking bot utilizing a webcam in my spare time during my second year. I decided to upload it so that it may be of assistance to others doing similar projects. The general algorithm of the project was taken from the following Hackster project:
https://www.hackster.io/junejarohan/ball-tracking-robot-7a9865
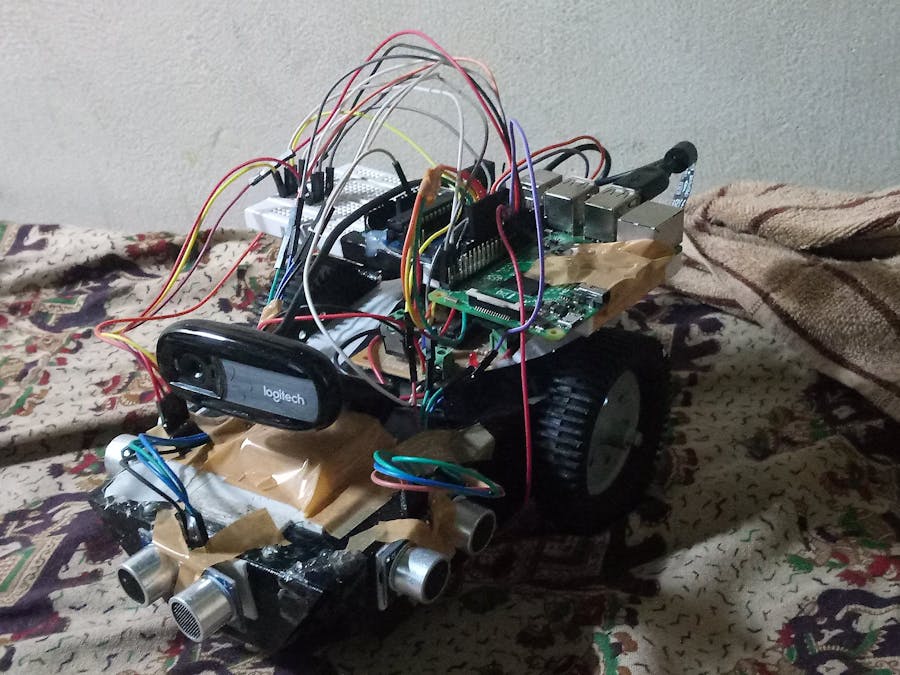
But it uses a slightly different code for the ball tracking and a webcam instead of a Pi Cam. The codes shown may have small bugs since the final version had not been saved so I uploaded an earlier version of the codes.
An Arduino was used instead of directly interfacing the motor driver with the pi since several of the gpio pins were not in working condition.
The bot searches for any circular object and moves towards it if found.If there is no such object it rotates 360 degrees at that point to try and find one and stops if it cant find a suitable object in an interval of time. The bot can avoid the obstacles if they come along the way of the way.It was a great learning experience and I hope it will help others in similar projects.




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










Comments
Please log in or sign up to comment.