


Initially, I integrated XARM7 with YOLOv8 for image segmentation Using a dataset from Roboflow, I trained the model on a Mini PC AMD, achieving impressive accuracy and speed. This compact PC proves efficient for AI training without needing a large setup, making it a potential future purchase for its portability and manageable heat levels, crucial for mobile AI applications. However, installing ROCm remains challenging, and it would be beneficial if future purchases included assistance with installation. Given the novelty of this technology, available information is still limited.
Training YOLOv8 with GPU
When using YOLOv8 for image segmentation, the GPU was initially not detected. After reinstalling Windows, the GPU was recognized. I used CMD to train YOLOv8 and found that installing PowerShell made it easier to detect the GPU. By creating a virtual environment and installing ultralytics, I started training the model using Python. The training speed was quite good, and the accuracy was near perfect.
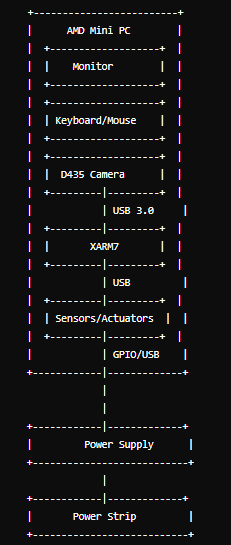
circuit diagram
AMD Mini PC:
Connect the AMD Mini PC to a monitor, keyboard, and mouse for interaction.
Install ROCm 5.7 and YOLOv8 on the Mini PC for running the AI model.
Connect the Intel RealSense D435 camera to the AMD Mini PC using a USB 3.0 cable.
Connect the XARM7 robotic arm to the AMD Mini PC using a USB cable for control signals.
Intel RealSense D435 Camera:
Connect the camera to the AMD Mini PC using a USB 3.0 cable to capture real-time images.
XARM7 Robotic Arm:
Connect the XARM7 to the AMD Mini PC using a USB cable for receiving control signals.
Sensors and Actuators:
Sensors (e.g., Temperature Sensor, Weight Sensor): Connect these sensors directly to the AMD Mini PC's GPIO pins or use USB interfaces if available. Place the sensors in appropriate positions in your workspace.
Actuators (e.g., Heating Elements): Connect these actuators to relay modules, which are then connected to the GPIO pins or USB interfaces of the AMD Mini PC for control.
Power Supply:
Ensure all components are connected to an appropriate power source.
Use a power strip with surge protection to connect the AMD Mini PC, XARM7, and sensors/actuators to the power supply.
Software Integration:
Install ROCm 5.7 on AMD Mini PC:
Follow the ROCm installation guide to set up ROCm 5.7 on your AMD Mini PC.
Install and Configure YOLOv8:
Set up a Python environment and install YOLOv8.
Configure YOLOv8 to use the ROCm runtime for leveraging the AMD GPU.
Develop Control Scripts:
Write Python scripts to capture images from the D435 camera and run them through YOLOv8 for object detection.
Based on YOLOv8’s output, send commands to the XARM7 robotic arm to manipulate ingredients.
Use the GPIO pins or USB interfaces of the AMD Mini PC to read sensor data and control actuators.
Run and Test:
Start the system and run the control scripts.
Monitor the performance and make adjustments as necessary.
{kind=link}

Comments