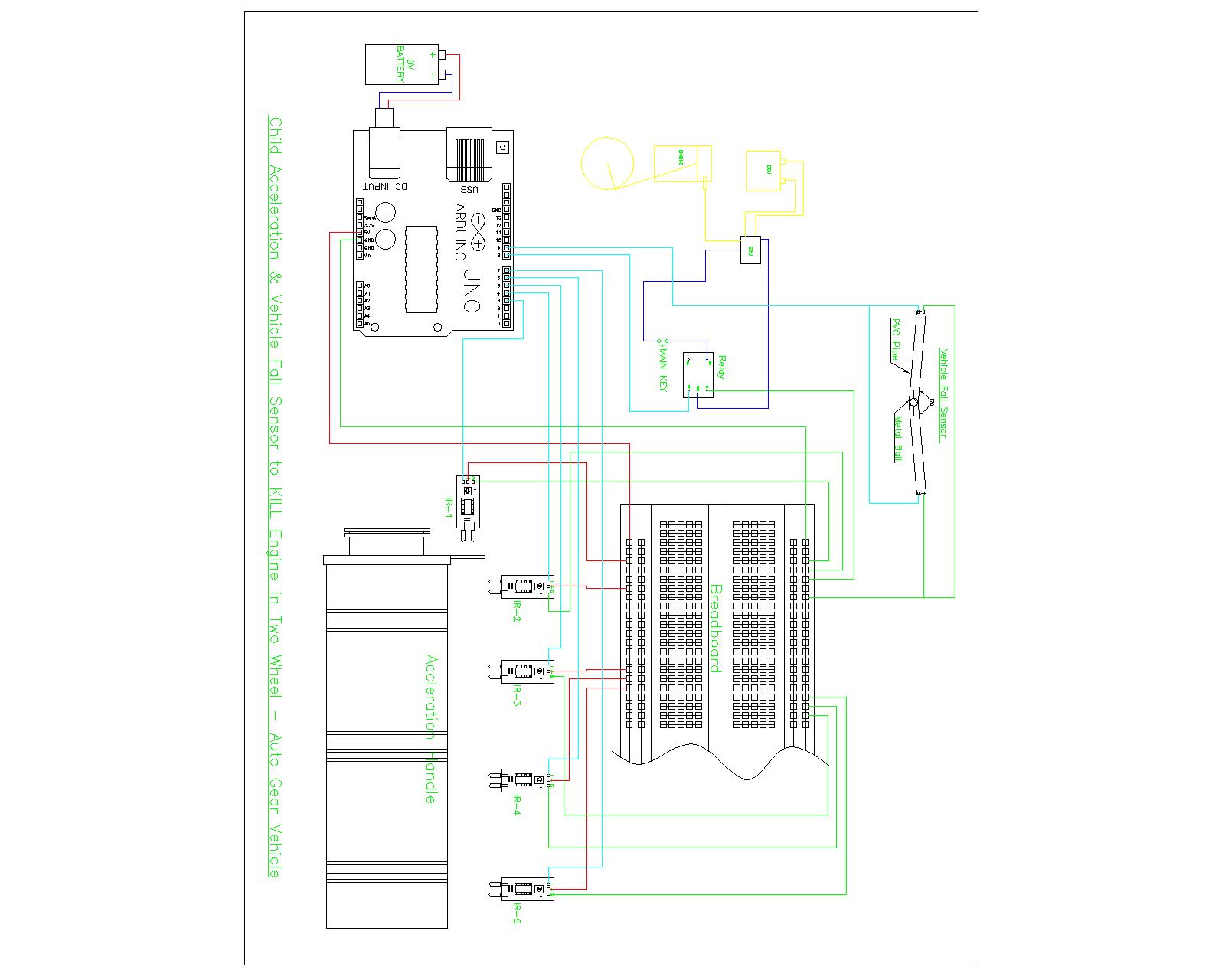
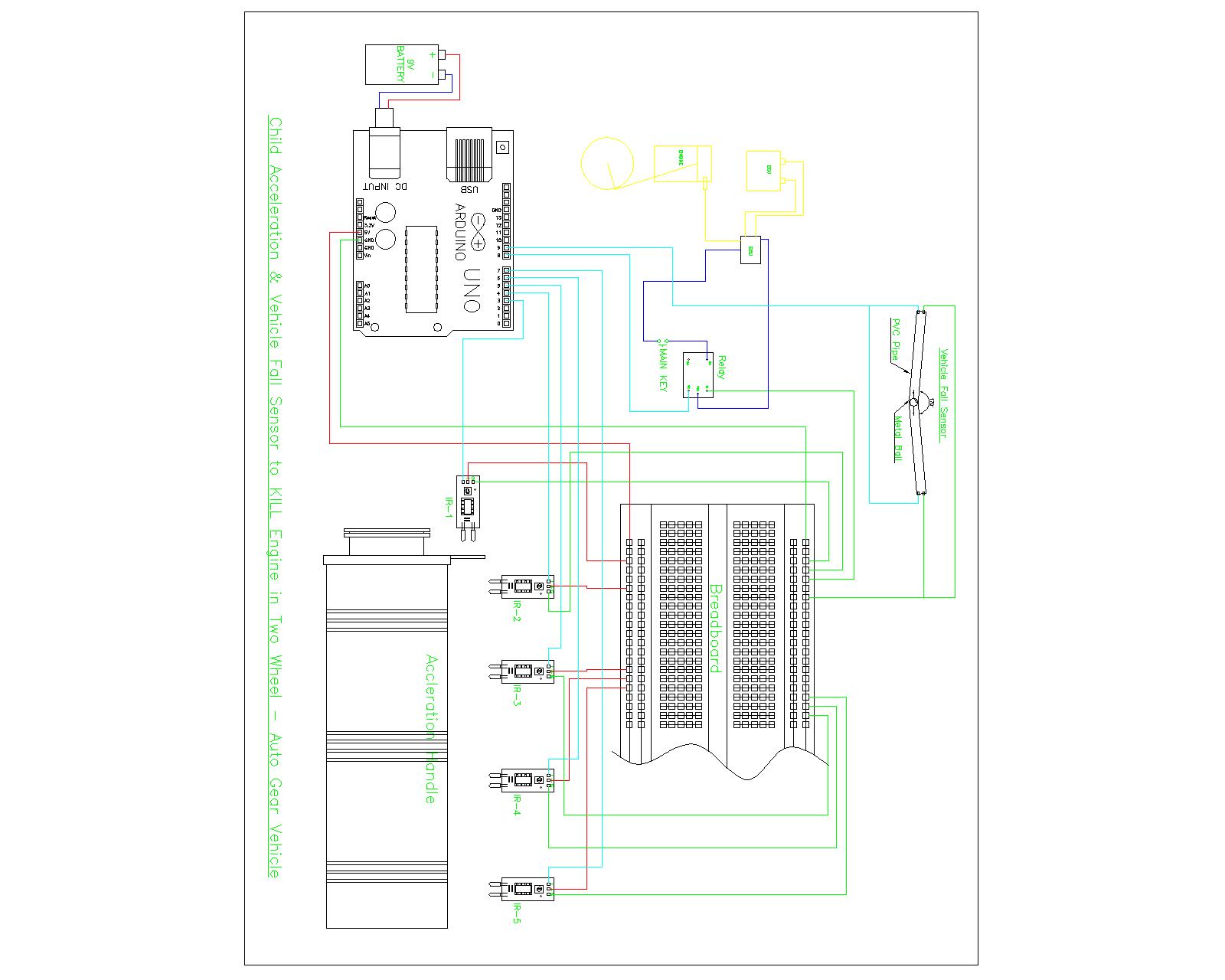
My project is about avoiding Children /Adult vehicle accidents which helps of sensors. The project has two accident avoiding sensor / Switch in a single circuit using ARDUINO-UNO controller.
I decided to make this project after seeing accidents in social media and oral reports for relatives & friends.
Part 1: Avoiding accident cost be children when they accelerate the vehicle un-noticed by the parent.
In this I have used 5 nos IR sensors modules, 1no helps to detect the handle rotation and 4nos placed one after the other above the vehicle accelerator handle helps detecting child or adult with respect to length of the hand. When sensor triggered is less than 4 and rotation sensor is triggered then the engine is kill. A 5V relay module is helps in opening the engine circuit.
Part 2: When a vehicle fall the engine is in running state, if the driver lift the vehicle by using the acceleration handle it may accelerate and case accident (See Video attached), these type of accidents can be avoided by installing a fall sensor switch. When the vehicle falls the switch send signal to Arduino to put OFF the engine.
Improvements:
1) Vehicle speed to be fed to circuit so that, this circuit (Part 1) gets ON when speed is less than a set speed (eg: <5kM/Hr)so that adults can ride >5kM/Hr irrespective to sensor.
2) IR sensor alternate - as IR sensors are sensitive to sunlight.
3) A tilt sensor module (Ball or mercury type) can be used to detect a fall of vehicle.
The above projects are the concepts that can be implemented in real time for safety.




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







{kind=link}
Comments
Please log in or sign up to comment.