[code]
/*
BIPOLAR STEPPER MOTOR CONTROL WITH EVALUATION BOARD OF THE STSPIN820 BY STMicroelectronicss
Versione 1.0 del 07/03/2018
AUTORE: microst
*/
// set pin numbers:
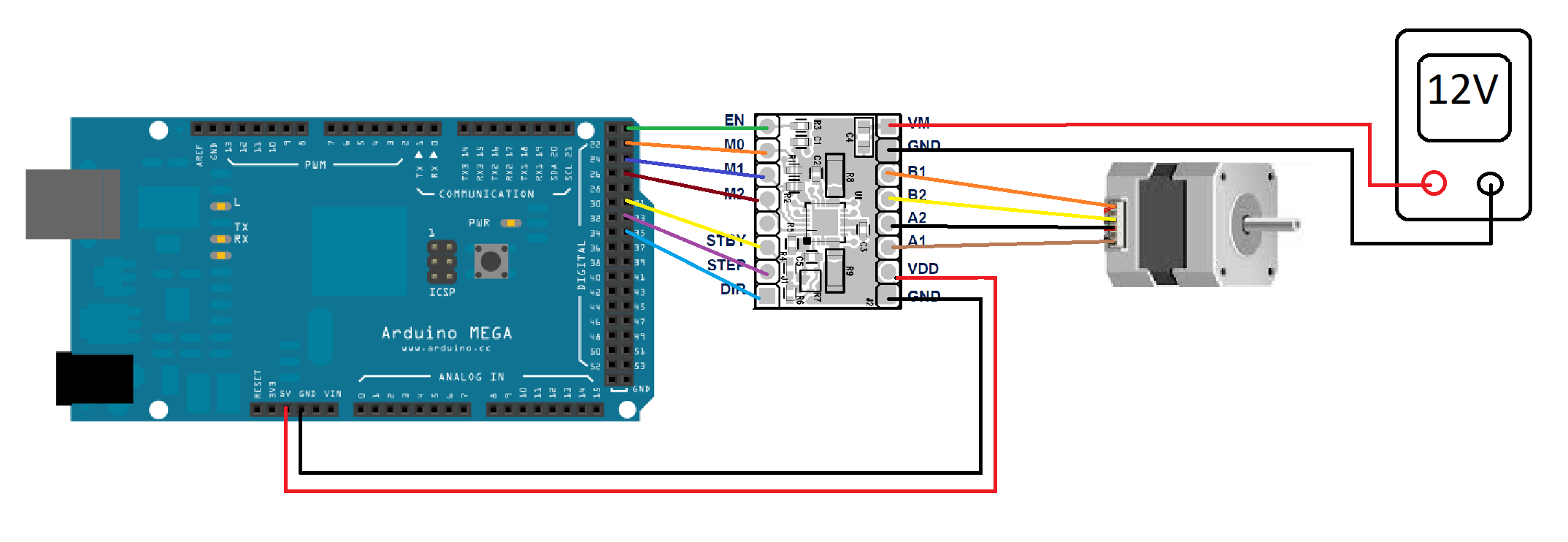
const int EN = 23;
const int M0 = 25;
const int M1 = 27;
const int M2 = 29;
const int STDBY = 33;
const int STEP = 35;
const int DIR = 37;
// variables will change:
int number = 0;
int freq = 10;
int swpulse = 0;
int lettura = 0;
int dur = 0.1;
int mode = 0;
int m0 = 0;
int m1 = 0;
int m2 = 0;
int dir= 0;
unsigned long tempMillis; di PWM
byte caratteri;
byte tempChar;
void setup() {
// pin definitions
Serial.begin(9600);
pinMode(STDBY, OUTPUT);
pinMode(M0, OUTPUT );
pinMode(M1, OUTPUT );
pinMode(M2, OUTPUT);
pinMode(DIR, OUTPUT);
pinMode(STEP, OUTPUT);
digitalWrite(STDBY, LOW); //device in stand-by
pinMode(EN, OUTPUT); digitalWrite(EN, LOW); // output stage disabled
digitalWrite(M0, HIGH);digitalWrite(M1, LOW);digitalWrite(M2, LOW); //initial mode configuration
delay (1000);
// Serial monitor menu
Serial.println(F(" m = mode"));
Serial.println(F(" r = dir anti clockwise "));
Serial.println(F(" l = dir clockwise"));
Serial.println(F(" e = driver on "));
Serial.println(F(" o = driver in stand by"));
Serial.println(F(" s = step"));
Serial.println(F(" f = frequency or speed"));
//
}
void loop() {
//check serial
if (Serial.available()) {
byte command = Serial.read(); //leggo il primo byte
switch (command) { //controllo che sia un comando valido
// enable the device ( out of stand by )
case 'e':
Serial.println(" driver on ");
digitalWrite(STDBY, HIGH);
delay(1);
break;
// disable the device - stand by
case 'o':
Serial.println(" driver in stand-by");
digitalWrite(STDBY, LOW);
break;
// define the cw motor direction
case 'l':
Serial.println(" direction clock wise");
dir=1;
break;
// define the ccw motor direction
case 'r':
Serial.println(" direction counter clock wise");
dir=0;
break;
case 's': //step number
readnumb();
swpulse=lettura;
Serial.println(F("step number is "));
Serial.println(swpulse, DEC);
Serial.println(F(" motor actived "));
stepper(swpulse,m0,m1,m2,dir,dur);
Serial.println(F("motor stopped "));
break;
case 'f': // speed number
readnumb();
freq=lettura;
dur= freq/2;
Serial.print(F("speed is "));
Serial.println(freq, DEC);
break;
case 'm': //mode selection
readnumb();
mode=lettura;
if(mode>6){mode=6;}
m0=0;m1=0;m2=0;
if ( mode==0 ) { Serial.println(F("mode 1/1 step selected"));}
if ( mode==1 ) { Serial.println(F("mode 1/2 step selected"));m0=1;};
if ( mode==2 ) { Serial.println(F("mode 1/4 step selected"));m1=1;}
if ( mode==3 ) { Serial.println(F("mode 1/8 step selected"));m0=1;m1=1;}
if ( mode==4 ) { Serial.println(F("mode 1/16 step selected"));m2=1;}
if ( mode==5 ) { Serial.println(F("mode 1/128 step selected"));m2=1;m1=1;}
if ( mode==6 ) { Serial.println(F("mode 1/256 step selected"));m2=1;m1=1;m0=1;}
break;
}
}
}
// function stepper for EVALSP820-XS
int stepper (int swpulse, int m0, int m1, int m2, int dir, int dur){
if (m0==0) {digitalWrite(M0, LOW);} else {digitalWrite(M0, HIGH);}
if (m1==0) {digitalWrite(M1, LOW);} else {digitalWrite(M1, HIGH);}
if (m2==0) {digitalWrite(M2, LOW);} else {digitalWrite(M2, HIGH);}
if (dir==0) {digitalWrite(DIR, LOW);} else {digitalWrite(DIR, HIGH);}
pinMode(EN, INPUT_PULLUP); // output stage on
delay(10);
if (digitalRead(EN)==LOW) {Serial.println(F(" VM UVLO condition: check the VM power supply ")); }
while (digitalRead(EN)==LOW) {;}
// STEP GENERATOR
for ( int i = 0; i < swpulse; i++) {
digitalWrite(STEP, HIGH);
delay(dur);
digitalWrite(STEP, LOW);
delay(dur);
if (digitalRead(EN)==LOW) {Serial.println(F("fault ")); i=swpulse; }
}
pinMode(EN, OUTPUT);
digitalWrite(EN, LOW); // output stage off
return;
}
int readnumb (){
lettura = 0; tempMillis = millis(); caratteri = 0;
do {
if (Serial.available()) {
tempChar = Serial.read();
caratteri++;
if ((tempChar >= 48) && (tempChar <= 57)) { //è un numero? ok
lettura = (lettura * 10) + (tempChar - 48);
} else if ((tempChar == 10) || (tempChar == 13)) {
//con invio e/o nuova linea esco
break;
}
}
} while ((millis() - tempMillis < 500) && (lettura <= 100) && (caratteri < 10));
//se il valore di PWM è valido, lo imposto sul pin
if (lettura >= 500) {lettura=500;}
return (lettura);
}
[/code]


_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



{kind=link}
Comments