


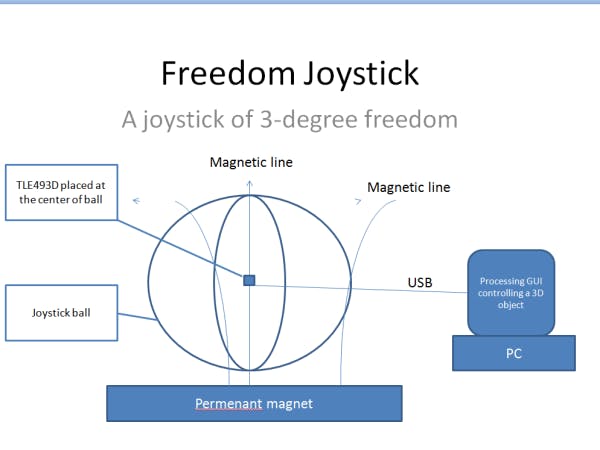
Degrees of Freedom
Conclusion
Software Part
Read more- The firmware running on TLE393D is programmed in Arduino using Infineon XMC-for-Arduino (https://github.com/Infineon/XMC-for-Arduino). This project is based on TLE493D-W2B6-3DMagnetic-Sensor by mhoechner (https://github.com/Infineon/TLE493D-W2B6-3DMagnetic-Sensor).
- The PC software, orGUI, runs on host PC and dialog with TLE493D through the Arduino serial link over USB. It is programmed in Processing language and is directly based on code example https://github.com/Infineon/TLV493D-A1B6-3DMagnetic-Sensor/blob/master/processing/standard/standard.pde
{kind=link}
{kind=link}
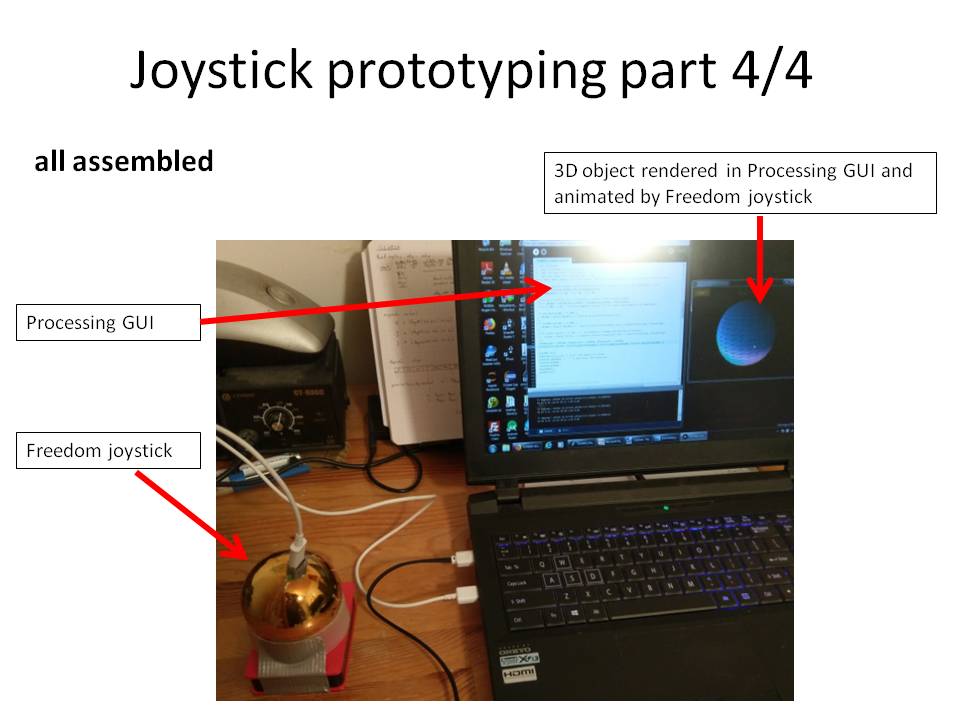
Processing GUI interacting with (TLE493D) Freedom Joystick
ProcessingThe PC software, or GUI, runs on host PC and dialog with TLE493D through the Arduino serial link over USB. It is programmed in Processing language and is directly based on code example https://github.com/Infineon/TLV493D-A1B6-3DMagnetic-Sensor/blob/master/processing/standard/standard.pde
"earth.png" referenced in the code is included in the following zip file
"earth.png" referenced in the code is included in the following zip file
//This example is designed for XMC example MagneticSensor3D -> spherical_fast
import processing.serial.*;
import java.util.Scanner;
ComPortMenu portSelect;
String inString;
boolean serialEventTrue = false; // set true on each serialEvent
float[] meas = new float[6]; //measurement x,y,z, amplitude, azimuth and polar angle in radian
PImage img;
PShape ball;
void setup()
{
size(640, 480,P3D);
background(0);
lights();
textFont(createFont("Arial", 16, true));
portSelect = new ComPortMenu();
portSelect.drawMenu();
//img = loadImage( "http://previewcf.turbosquid.com/Preview/2014/08/01__15_41_30/Earth.JPG5a55ca7f-1d7c-41d7-b161-80501e00d095Larger.jpg");
img = loadImage( "earth.jpg");
ball = createShape(SPHERE, height/3);
ball.setTexture(img);
}
void draw()
{
Serial comPort = portSelect.getComPort();
float s;
int i;
if(comPort != null)
{
try
{
comPort.bufferUntil('\n'); // serialEvent is triggered only once per complete line
if (serialEventTrue) {
Scanner comInput = new Scanner(inString);
comInput.useLocale(java.util.Locale.US);
i = 0;
for (int k=0;k<6; k++) {
if (!comInput.hasNextFloat())
comInput.next();
if (comInput.hasNextFloat())
meas[i++] = comInput.nextFloat();
}
if (i == 6) {
background(0); // erase beafore redrawing
// because of the prototype is wired and the TLE493D board is oriented USB up,
// TLE493D X point to ball's top, TLE493D Y => ball's right (depends on how you hold it), TLE493D Z => away from you
viewSphere(meas[0], meas[1], meas[2]);
portSelect.drawMenu();
println(inString);
} else {
println("bug: only received ",i," floats in ",inString );
}
serialEventTrue = false; // consume this serialEvent
inString = "";
comInput.close();
}
}
catch(Exception e)
{
System.err.print("Invalid COM input: ");
System.err.println(inString);
System.err.print("Original message: ");
System.err.println(e.getMessage());
}
}
}
// visualize the meaured magnetic B vector with a Processing built-in 3D ball
// Axis alignement:
// ball to-bottom axis (Processing Y) = -Bx
// ball to-right axis (Processing X) = By
// ball to-viewer axis (Processing Z) = Bz
//to-viewer means coming out of the screen. ball's to-right/to-bottom is from viewer's point of view
// memorize previous angle around Processing x-axis, Processing y-axis, and Processing z-axis
float xAlpha_prev=0,yAlpha_prev=0,zAlpha_prev=0;
void viewSphere(float Bx, float By, float Bz)
{
float c_x = width/2, c_y = height/2; // center in the display window
float xAlpha = xAlpha_prev,yAlpha = yAlpha_prev,zAlpha = zAlpha_prev;
float E_THR = 1.2f; // minimum magnetic strenth for the angle measurement to be meaningful
if (sq(-Bx)+sq(By) > E_THR) {
zAlpha = atan2(-By,Bx); // rotation around Processing Z-axis
}
if (sq(Bz)+sq(-Bx) > E_THR) {
xAlpha = atan2( -Bz,Bx); // rotation around Processing X-axis = atan2(ProcessingZ, ProcessingY)
}
//if (sq(By)+sq(Bz) > E_THR) { // 3rd degree of freedom not working as expected
// yAlpha = atan2( Bz,By); // rotation around Processing Y-axis = atan2(ProcessingX, ProcessingZ)
//}
xAlpha_prev = xAlpha; yAlpha_prev = yAlpha; zAlpha_prev = zAlpha;
println("in degrees: xAlpha",degrees(xAlpha),"yAlpha",degrees(yAlpha),"zAlpha",degrees(zAlpha) );
pushMatrix();
translate(c_x,c_y); // center the sphere on screen
rotateX(-xAlpha); // '-' is empirique, don'tknow why
rotateY(yAlpha);
rotateZ(zAlpha);
shape(ball);
popMatrix();
}
////////////////////////////////////////////////
Serial createSerial(String name)
{
try
{
//return new Serial(this, name, 9600);
return new Serial(this, name, 1000000);
}
catch(Exception e)
{
System.err.print("err createSerial: ");
System.err.println(e.getMessage());
return null;
}
}
void serialEvent(Serial port)
{
inString = port.readString();
//println("serialEvent: ", inString);
serialEventTrue = true;
}
void mousePressed()
{
portSelect.clickHandler();
}
class ComPortMenuButton
{
private int mX;
private int mY;
private int mWidth;
private int mHeight;
private String mName;
private boolean mIsActive;
public ComPortMenuButton(int btnX, int btnY, int btnWidth, int btnHeight, String btnName)
{
mX = btnX;
mY = btnY;
mWidth = btnWidth;
mHeight = btnHeight;
mName = btnName;
mIsActive = false;
}
boolean mouseOverBtn()
{
return (mouseX>mX && mouseX<mX+mWidth && mouseY>mY && mouseY<mY+mHeight);
}
public void drawButton()
{
fill(70);
if(mIsActive)
{
fill(120,80,0);
}
if(mouseOverBtn())
{
fill(180,120,0);
}
rect(mX, mY, mWidth, mHeight);
fill(255);
textAlign(CENTER);
text(mName, mX+mWidth/2,mY+mHeight/2+8);
}
void setInActive()
{
mIsActive = false;
}
Serial setActive()
{
mIsActive = true;
return createSerial(this.mName);
}
}
class ComPortMenu
{
private ArrayList<ComPortMenuButton> mButtons;
private ComPortMenuButton mActiveBtn = null;
private Serial mComPort = null;
public ComPortMenu()
{
int i = 0;
mButtons = new ArrayList();
// for (String current : Serial.list()) println("serial ele: ", current);
for(String current : Serial.list())
{
int x = i % 5;
int y = i / 5;
mButtons.add(new ComPortMenuButton(100*x+5, 50*y+5, 90, 40, current));
i++;
}
}
public void drawMenu()
{
for(ComPortMenuButton current : mButtons)
{
current.drawButton();
}
}
public void clickHandler()
{
for(ComPortMenuButton current : mButtons)
{
if(current.mouseOverBtn())
{
if(mActiveBtn != null)
mActiveBtn.setInActive();
mActiveBtn = current;
mComPort = current.setActive();
}
}
}
public Serial getComPort()
{
return mComPort;
}
}
TLE493D firmware in Arduino
ArduinoThe firmware running on TLE393D is programmed in Arduino using Infineon XMC-for-Arduino (https://github.com/Infineon/XMC-for-Arduino). This project is based on TLE493D-W2B6-3DMagnetic-Sensor by mhoechner (https://github.com/Infineon/TLE493D-W2B6-3DMagnetic-Sensor).
#include <Tle493d_w2b6.h>
Tle493d_w2b6 Tle493dMagnetic3DSensor = Tle493d_w2b6(Tle493d_w2b6::FASTMODE);
float x = 0.0f, y = 0.0f, z = 0.0f;
float r,theta,phi; // phi - azimuth, theta - polar
const float beta = 0.995f, alpha = 1-beta;
void setup() {
Serial.begin(1000000);
while (!Serial);
Tle493dMagnetic3DSensor.begin();
//prtReg();
}
void loop() {
for (int i=0;i<50;i++) {
getMeas();
}
getAngle();
Serial.print(x);Serial.print(" ");
Serial.print(y);Serial.print(" ");
Serial.print(z);Serial.print(" ");
Serial.print(r);Serial.print(" ");
Serial.print(theta);Serial.print(" ");
Serial.print(phi);Serial.print(" ");
Serial.println();
}
void getMeas() { // output in x,y,z,r,theta,phi
Tle493dMagnetic3DSensor.updateData();
x = beta*x + alpha*Tle493dMagnetic3DSensor.getX();
y = beta*y + alpha*Tle493dMagnetic3DSensor.getY();
z = beta*z + alpha*Tle493dMagnetic3DSensor.getZ();
}
void getAngle() {
r = sqrt(x*x + y*y + z*z); // sqrt(x^2 + y^2 + z^2)
theta = 1.57f - atan2(z,sqrt(sq(x)+sq(y)));
phi = atan2(y,x);
}
void prtReg() { // modify Tle493d_w2b6 class and make mInterface public
tle493d_w2b6::BusInterface_t& bus = Tle493dMagnetic3DSensor.mInterface;
Serial.print("bus addr=");
Serial.print(bus.adress, HEX);
Serial.print(",reg10=");
Serial.print(bus.regData[0x10],BIN);
Serial.print(",reg11=");
Serial.print(bus.regData[0x11],BIN);
Serial.print(",reg13=");
Serial.print(bus.regData[0x13],BIN);
Serial.print(",reg06=");
Serial.print(bus.regData[0x06],BIN);
Serial.println("");
}

Comments
Please log in or sign up to comment.