/*
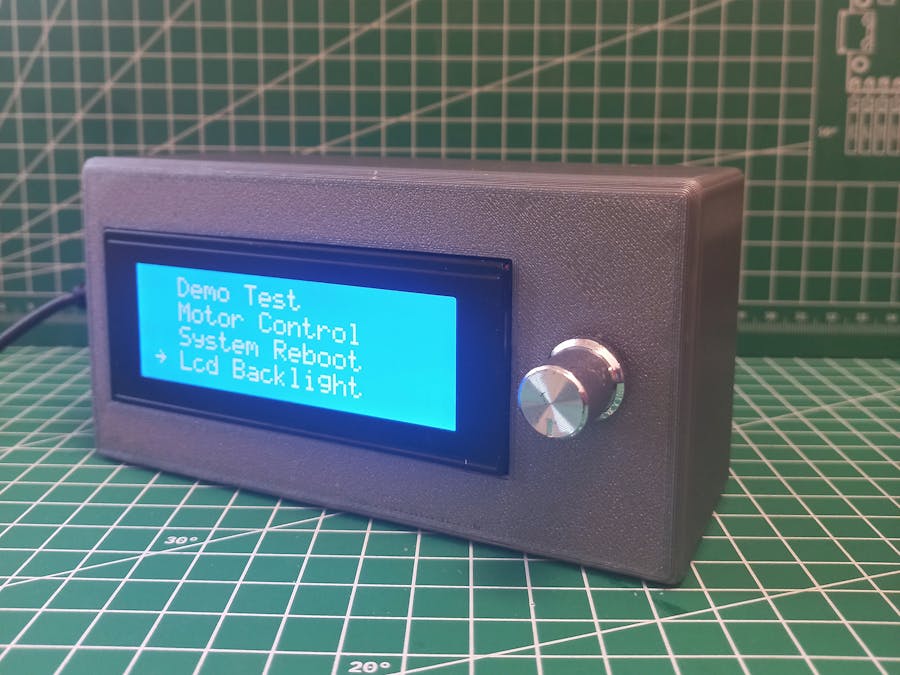
* Project Name => Controller With Menu
*
* Designed by Mirali Tiryaki
* instagram => https://www.instagram.com/mirali_tiryaki_/
* Linkedin => https://tr.linkedin.com/in/mirali-tiryaki-35ba27224
* Mail => miralitiryaki1@gmail.com
*
*
*/
#include <Arduino.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <ezButton.h>
#include <EEPROM.h>
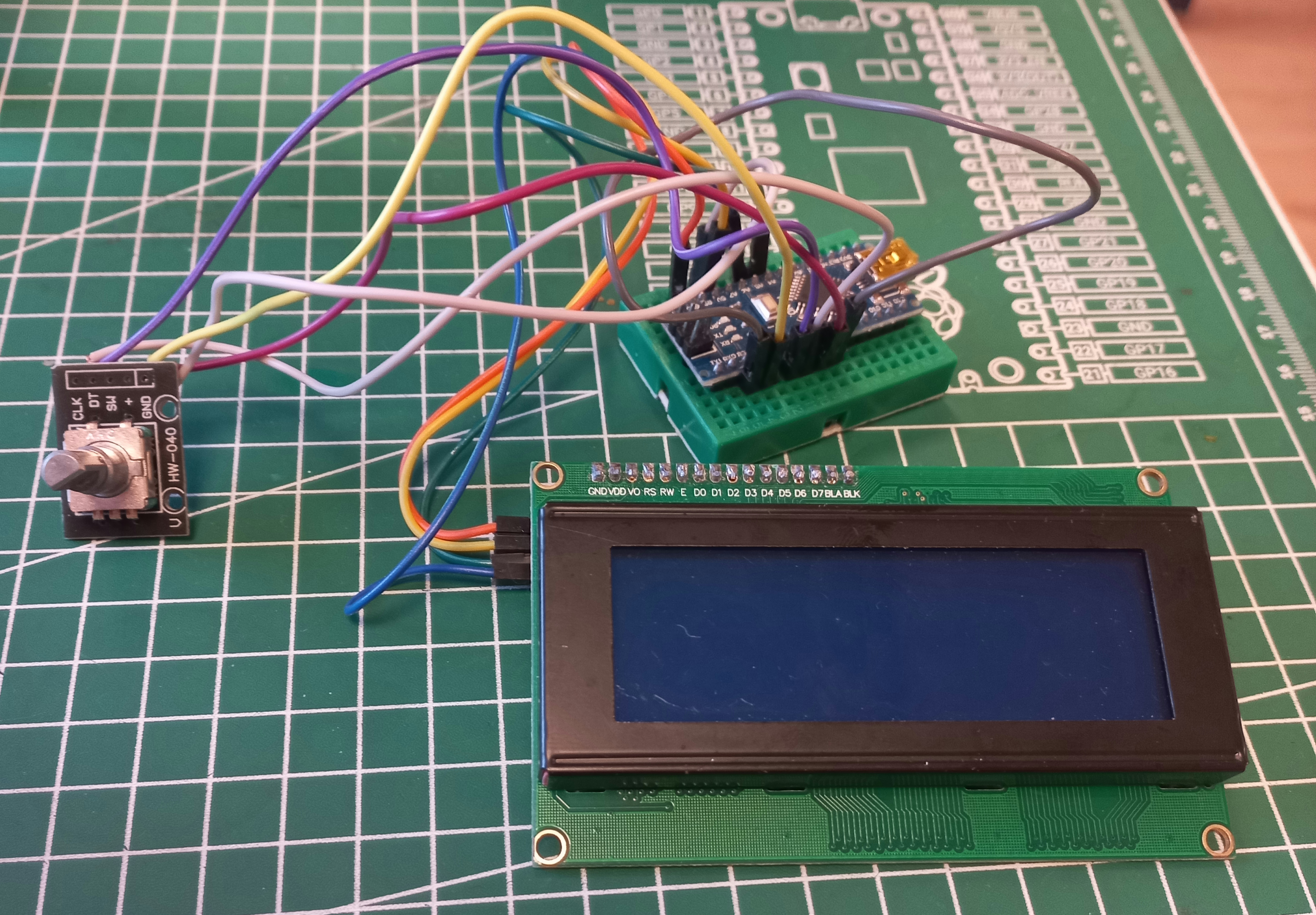
ezButton button(5);
LiquidCrystal_I2C lcd(0x27,20,4);
String directionData = "Right";
String power = "OFF";
const int LONG_PRESS_TIME = 1000;
unsigned long pressedTime = 0;
int counter = 0;
int buttonState = 0;
int yon;
int clk_son;
int clk_simdi;
int clk = 3;
int dt = 4;
int buton = 5;
int speedCount = 10;
int lastState = LOW;
int btnState;
int currentState;
bool menuFlag = true;
bool isPressing = false;
bool isFirstPress = true;
bool isLongDetected = false;
bool longpress = false;
bool yonBilgileri = false;
byte rightOk[8] = {
B00000,
B00100,
B00010,
B11111,
B00010,
B00100,
B00000,
B00000
};
void updateEncoder()
{
clk_simdi = digitalRead(clk);
if (clk_simdi != clk_son) {
if (digitalRead(dt) == clk_simdi) {
counter++;
if(counter >= 3)
{
counter = 3;
}
yon = true;
}
else {
counter--;
if(counter <= 0)
{
counter = 0;
}
yon = false;
}
}
clk_son = clk_simdi;
}
int resetPin = 6;
void setup() {
lcd.init();
pinMode(buton, INPUT_PULLUP);
pinMode(clk, INPUT_PULLUP);
pinMode(dt, INPUT_PULLUP);
pinMode(buton, INPUT_PULLUP);
digitalWrite(resetPin, HIGH);
pinMode(resetPin, OUTPUT);
lcd.backlight();
clk_son = digitalRead(clk);
Serial.begin(115200);
attachInterrupt(digitalPinToInterrupt(clk), updateEncoder, CHANGE);
attachInterrupt(digitalPinToInterrupt(dt), updateEncoder, CHANGE);
button.setDebounceTime(40);
lcd.setCursor(0,0);
lcd.print(" Designed By ");
lcd.setCursor(0,1);
lcd.print(" Mirali Tiryaki");
lcd.setCursor(0,2);
lcd.print(" Motor Controller");
lcd.setCursor(0,3);
lcd.print(" Starting");
delay(1000);
lcd.setCursor(14,3);
lcd.print(".");
delay(1000);
lcd.setCursor(15,3);
lcd.print(".");
delay(1000);
lcd.setCursor(16,3);
lcd.print(".");
delay(4000);
lcd.clear();
}
void longPressRead()
{
currentState = digitalRead(buton);
if(lastState == HIGH && currentState == LOW) {
pressedTime = millis();
isPressing = true;
isLongDetected = false;
} else if(lastState == LOW && currentState == HIGH) {
isPressing = false;
}
if(isPressing == true && isLongDetected == false) {
long pressDuration = millis() - pressedTime;
if( pressDuration > LONG_PRESS_TIME ) {
Serial.println("A long press is detected");
if(counter == 0 and menuFlag == false)
{
lcd.clear();
lcd.setCursor(3,1);
lcd.print("KAYDEDILDI");
delay(750);
lcd.clear();
menuFlag = true;
}
isLongDetected = true;
longpress = true;
delay(1000);
}
}
lastState = currentState;
}
void loop()
{
longPressRead();
Serial.println(counter);
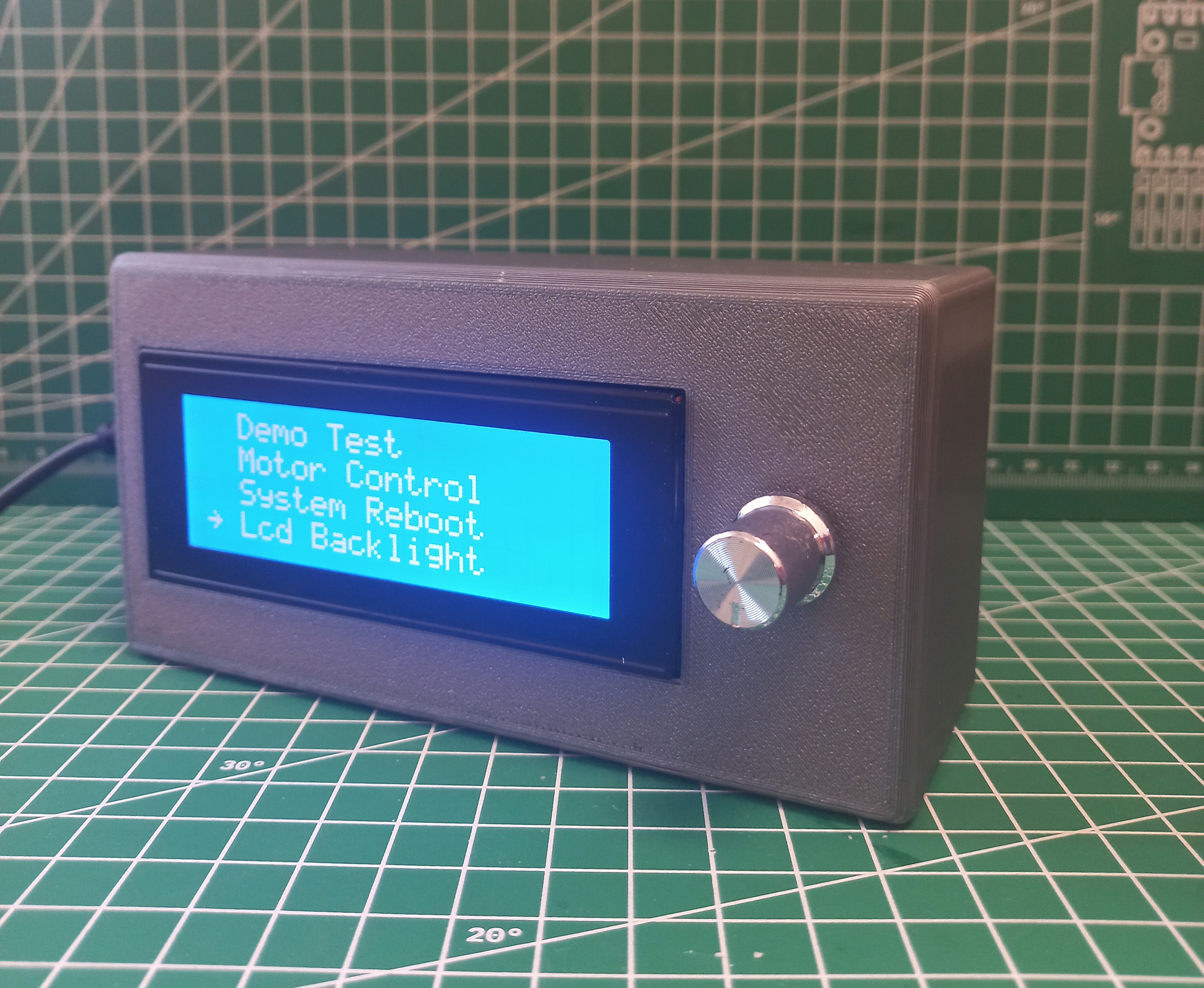
if(menuFlag == true)
{
lcd.setCursor(2,0);
lcd.print("Demo Test");
lcd.setCursor(2,1);
lcd.print("Motor Control");
lcd.setCursor(2,2);
lcd.print("System Reboot");
lcd.setCursor(2,3);
lcd.print("Lcd Backlight");
}
button.loop();
btnState = button.getState();
if(menuFlag == false)
{
lcd.setCursor(14,2);
lcd.print(directionData);
lcd.setCursor(14,3);
lcd.print(power);
lcd.setCursor(14,1);
lcd.print(speedCount);
}
switch(counter){
case 0:
lcd.setCursor(0,1);
lcd.print(" ");
lcd.setCursor(0,2);
lcd.print(" ");
lcd.setCursor(0,3);
lcd.print(" ");
lcd.createChar(0, rightOk);
lcd.setCursor(0,0);
lcd.write(byte(0));
break;
case 1:
lcd.setCursor(0,0);
lcd.print(" ");
lcd.setCursor(0,2);
lcd.print(" ");
lcd.setCursor(0,3);
lcd.print(" ");
lcd.setCursor(0,1);
lcd.write(byte(0));
if(button.isPressed())
{
menuFlag = false;
lcd.setCursor(1,0);
lcd.print("Motor Control Menu");
lcd.setCursor(1,1);
lcd.print("Motor speedCount :");
lcd.setCursor(1,2);
lcd.print("Direction :");
lcd.setCursor(1,3);
lcd.print("Motor Power :");
if(digitalRead(buton) == LOW and counter == 1 and menuFlag == false )
{
if( speedCount < 100)
{
speedCount = speedCount+10;
}
else if (speedCount == 100)
{
speedCount = 0;
lcd.setCursor(16,1);
lcd.print(" ");
}
lcd.setCursor(14,1);
lcd.print(speedCount);
}
}
break;
case 2:
lcd.setCursor(0,0);
lcd.print(" ");
lcd.setCursor(0,1);
lcd.print(" ");
lcd.setCursor(0,3);
lcd.print(" ");
lcd.setCursor(0,2);
lcd.write(byte(0));
buttonState = digitalRead(buton);
if(buttonState == LOW and menuFlag == true)
{
digitalWrite(resetPin, LOW);
}
if(menuFlag == false)
{
if (buttonState == LOW) {
if (isFirstPress) {
isFirstPress = false;
lcd.setCursor(14,2);
directionData = "Right";
lcd.print(directionData);
} else {
lcd.setCursor(14,2);
directionData = "Left ";
lcd.print(directionData);
isFirstPress = true;
}
delay(500);
}
}
break;
case 3:
lcd.setCursor(0,0);
lcd.print(" ");
lcd.setCursor(0,1);
lcd.print(" ");
lcd.setCursor(0,2);
lcd.print(" ");
lcd.setCursor(0,3);
lcd.write(byte(0));
buttonState = digitalRead(buton);
if(counter == 3 and buttonState== LOW)
{
if (isFirstPress) {
lcd.noBacklight();
isFirstPress = false;
} else {
lcd.backlight();
isFirstPress = true;
}
delay(500);
}
if(menuFlag == false)
{
if (buttonState == LOW) {
if (isFirstPress) {
power = "ON ";
isFirstPress = false;
} else {
power = "OFF";
isFirstPress = true;
}
delay(500);
}
}
break;
}
}















_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.