



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
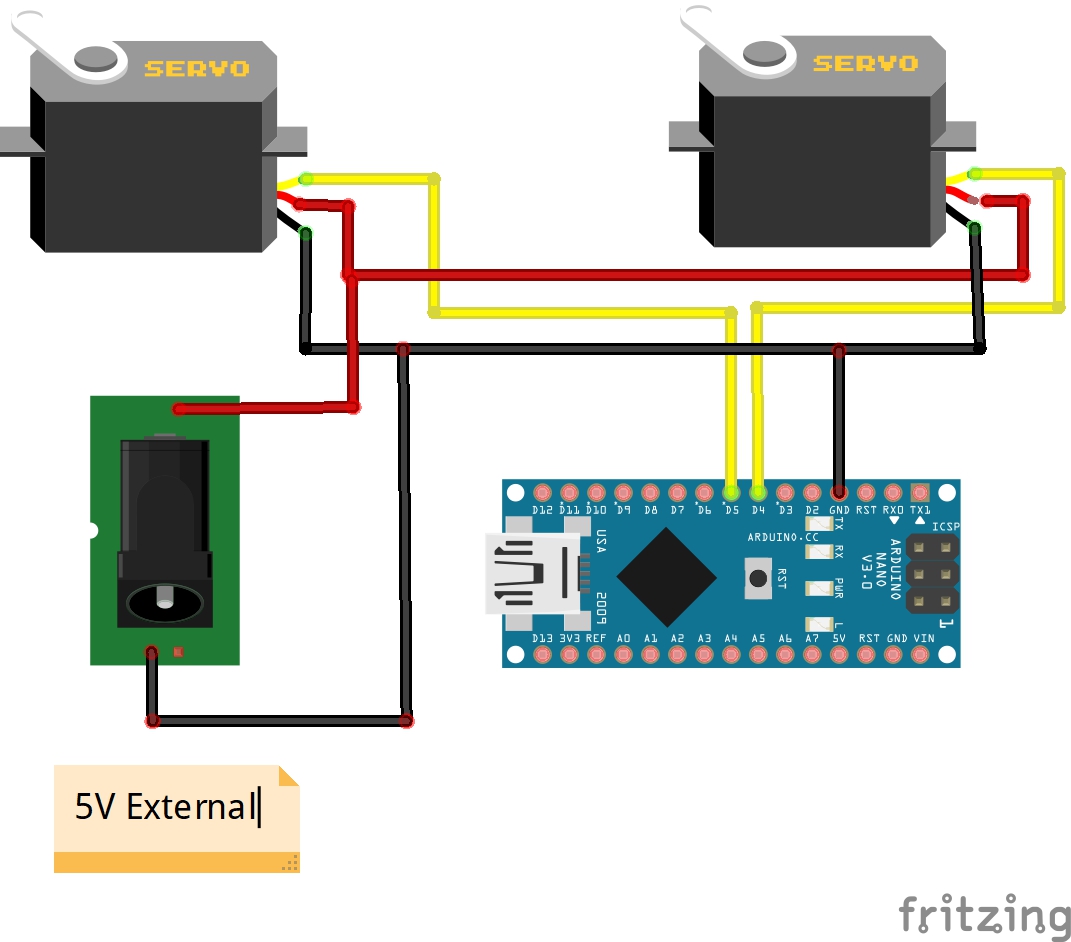
SimTools is a generic Motion Simulator Software able to control multiple hardware interfaces, including Arduino. This combination is used in the project presented in the video. Hardware part consist only Arduino Nano microcontroller and two cheap SG90 micro servo motors. We only need to upload the code given below.
The required game data with help of the SimTools software is transmitted through the serial port to the Arduino. Next Arduino activates servo motors that move the simulation platform accordingly. This is a small scale of a two-axis simulator. To make a real simulator, you need to add motor drivers and large servo motors.
There are many examples of such DIY simulators as well as construction drawings and tips on "https://www.xsimulator.net/" page. The SimTools setup procedure is described in the video, but you can also download the PDF user manual on: https://simtools.us/wp-content/uploads/2019/06/SimToolsUserManual-v2.4.pdf
SimTools will run in “Demo” mode until a valid license has been registered. The plugin for Live for Speed is fully operational for testing while SimTools is in demo mode. (The demo of Live for Speed will work for testing SimTools too.) You can find more in formation and download Live for Speed at https://www.lfs.net/downloads
SimTools download link:
https://www.xsimulator.net/community/marketplace/motion-simulation-software-simtools.63/




{kind=link}
Comments
Please log in or sign up to comment.