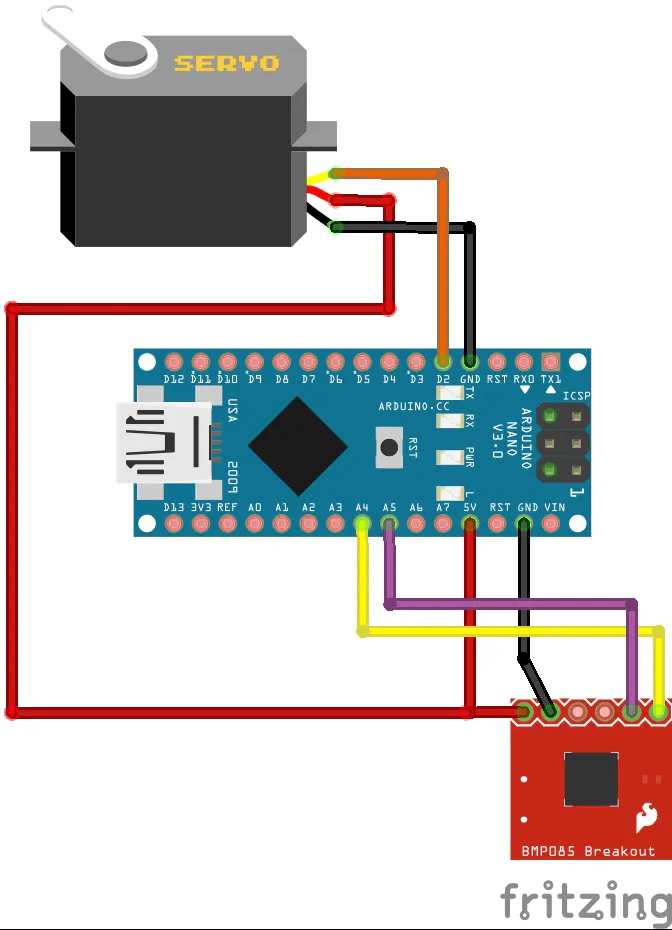
Barometer is an instrument for determining the pressure of the atmosphere and hence for assisting in forecasting weather. Pressure tendency can forecast short term changes in the weather. A device that shows a tendency change in atmospheric pressure in a unit of time is called Tendencymeter. The video describes how to make such a device with the help of Arduino microcontroller and 9g servo motor, which serves as a pointer.
When the arrow moves to the left, then the probability of changing weather and rain is higher and vice versa, if the arrow moves to the right it means that the weather will improve.
At startup, it shows the battery level (imagine that the scale is from 0 to 100%). It wakes up every 10 minutes, makes calculations, if there are changes, it connects the servo drive and turns the arrow.
The scheme uses a deep energy saving mode, which allows you to work for a very long time on a single battery charge. Because the device is used at home, I connected an external power supply 5V / 500mA and then I made a small change to the original code to support this way of working. Otherwise a project is presented by "alexgyver" on whose website you can find more information as well as the original code.
Finally, to say that the movement of the arrow is slow and to get the first results after turning on the device should take at least an one hour. The device is a very useful tool in any home, and is very easy to read and most importantly, without any knowledge of meteorology we can easily predict the weather in the next period of the day.














{kind=link}
Comments
Please log in or sign up to comment.