


Hardware components | ||||||
| × | 1 | ||||
| × | 7 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
This is my first project with ESP8266 so I wanted to try to make some simple device. From one of my previous projects (Bluetooth-controlled scrolling text), I have a finished 8x56 LEDs matrix consisting of 7pcs MAX7219 LED matrix modules 8x8, and located in the appropriate box.
Let me mention that these modules are older, and as you see in the given picture, contain DIL IC on the front. The new modules are made in smd technology and usually composed of 4 coupled matrices, and they are turned 90 degrees clockwise.
I decided to make a beautiful animated (flip) clock with big digits, which is synchronized over the Internet. The basis for my project was the code of Pawel A. Hernik from which I removed the part that shows the weather information and currency rate. I did this to make the code as simple as possible and more understandable.I also made the following changes to adjust to my project:
- Display of 7 instead of 6 matrices
- Clock and seconds blinking dots are moved for 4 LEDs to the right
- Texts "connecting" and "getting data" are displayed in the middle of the screen
- An increased period of time between two data collections from a server
- UTC offset changed to "1" for my country
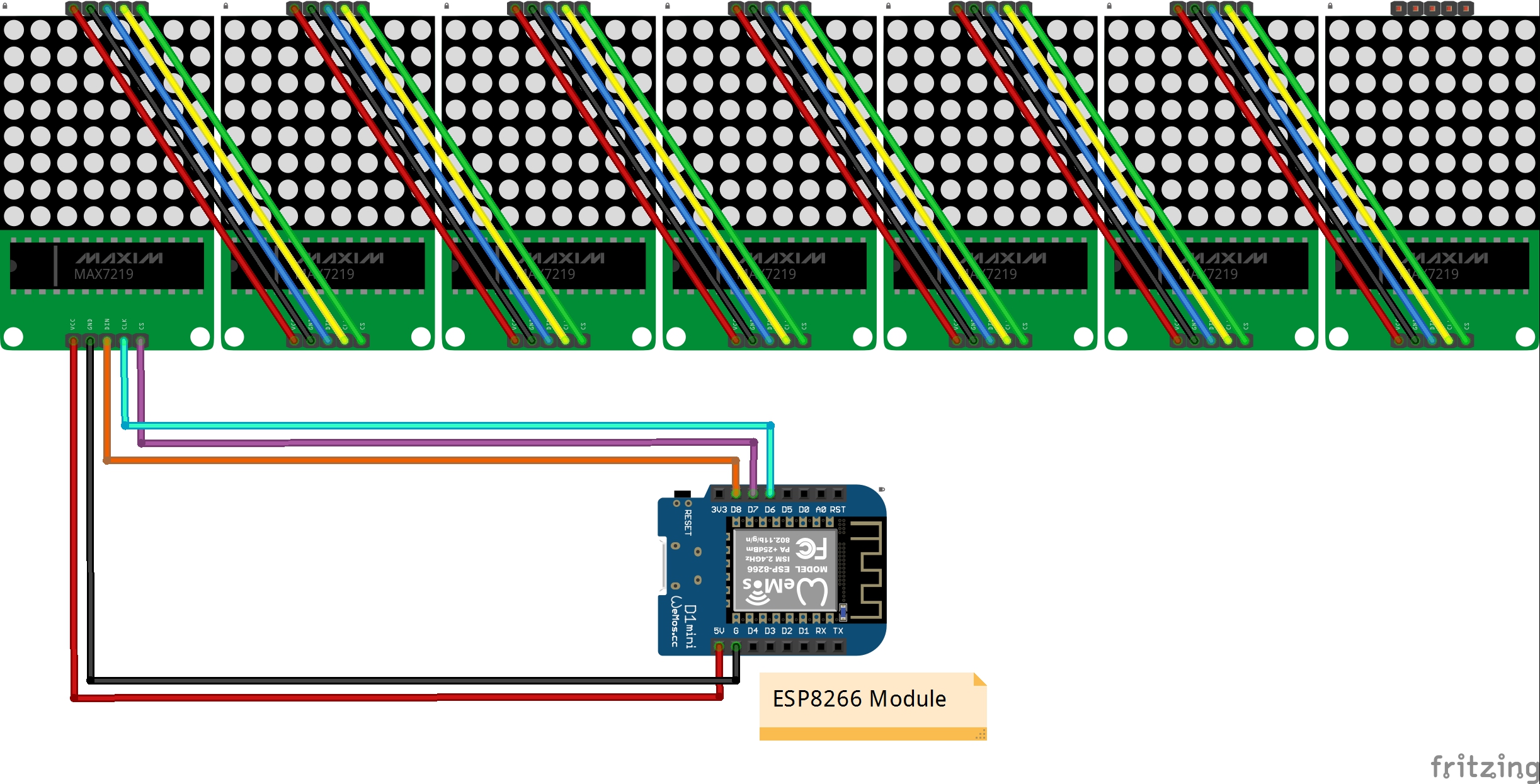
We must first install the ESP8266 board on Arduino IDE, and then upload the code on the appropriate board and port. The code cannot be compiled on the latest version of the ESP board (2.5.0), so we must install an older version (2.4.2).
On the same hardware with minimal changes, it can be installed more codes.For example, in the video below, you can see a YouTube channel Subscriptions and views counter.as can be seen from the picture, the circuit is very simple, and the two codes are:
{kind=link}

Comments
Please log in or sign up to comment.